(З) СЛЕДЯЩАЯ СИСТЕМА ПОВОРОТА ПРОЕКТОРА КИНОТРЕНАКЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU877472A2 |
| Следящая система поворота проектора кинотренажа | 1972 |
|
SU451057A1 |
| Следящая система поворота проектора кинотренажера | 1978 |
|
SU729551A2 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU960724A2 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU1029144A2 |
| Следящая система поворота проектора кинотренажера | 1984 |
|
SU1246052A2 |
| Устройство для управления кинотренажером | 1984 |
|
SU1275515A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Тренажер для обучения водителей транспортных средств | 1980 |
|
SU985818A1 |
| Тренажер для обучения водителей транспортных средств | 1985 |
|
SU1257694A1 |
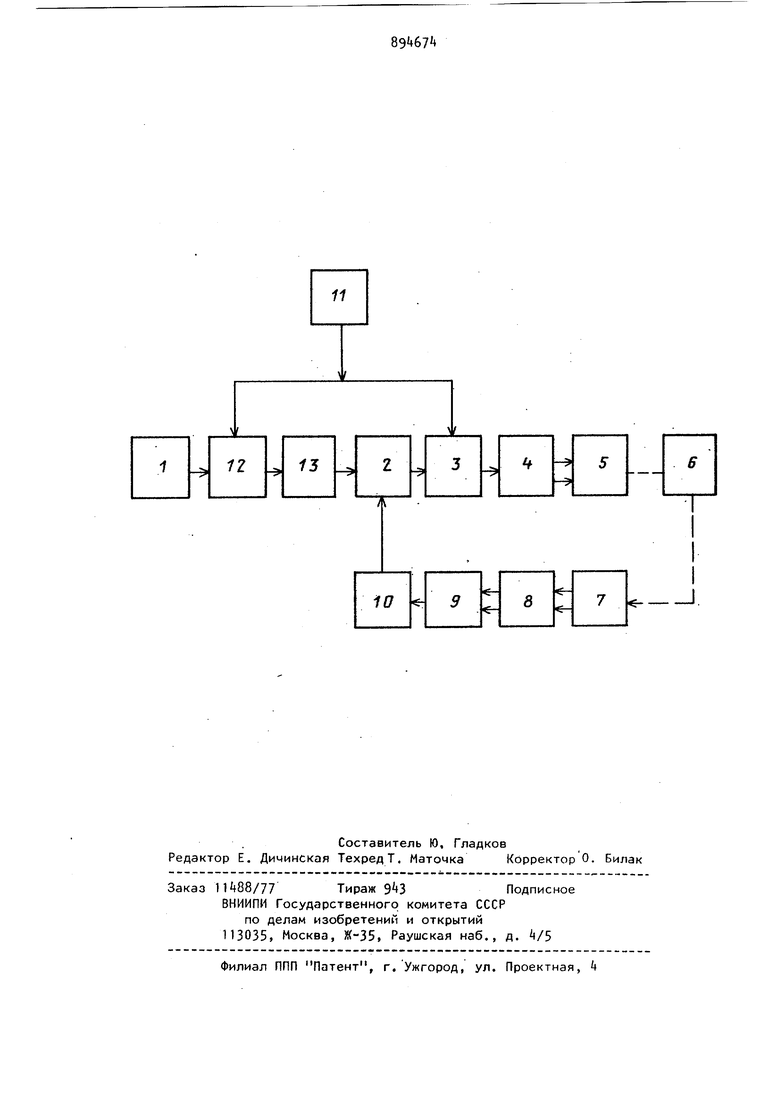
Изобретение относится к автоматике и может найти применение в устройствах для тренировки водителей транспортных средств. По основному авт.св. № 51057 известна следящая система поворота прое ктора кинотренажера, содержащая датчик скорости прямолинейного движения и последовательно соединенные блок сч тывания топограммы, сумматор, первое множительное устройство, рулевую машинку, кинопроектор, экран механикаводителя, рычаги управления, датчики поворота и усилительное устройство, выход которого соединен со вторым вхо дом сумматора, а выход датчика скорости прямолинейного движения соединен со вторым входом первого множительного устройства l 3 Недостатком известной системы является то, что она не может работать с сигналом обратной свяЗи, пропорциональным курсовому углу поворота трассы. Это значительно снижает ее функциональные возможности, усилительные устройства которых формируют сигнал обратной связи пропорционально курс-овому углу движения имитируемого транспортного средства. Цель изобретения - расширение функциональных возможностей системы. Поставленная цель достигается тем, что в системе установлены второе множительное устройство и интегратор, причем выход блока считывания тояограммы соединен с первым входом сумматора через последовательно соединенные второе множительное устройство и интегратор, а выход датчика скорости прямолинейного движения подключен ко второму входу второго мно|кительного устройства.. блок-схсмп системы представлена на чертеже, Система содержит блок 1 считывания топограммы, сумматор 2, первое иножительное устройство 3, рулевую машинку k, кинопроектор 5, экран 6, мехаиика-водителя 7, рычаги 8 управления, датчики 9 поворота, усилительное устройство 10, датчик 11 скорости прямолинейного движения, второе множительное устройство 12, интегратор 13. Следящая система поворота проектора кинотренажера работает следующим образом. С блока 1 считывания топограммы снимается напряжение, пропорциональное кривизне траектории машины. Последнее с помощью второго множительного устройства 12 умножается на напряжение, пропорциональное линейной скорости движения машины, снимаемое с датчика 11 скорости прямолинейного движения. В результате перемножения на выходе второго множительного устро ства 12 формируется напряжение, пропорциональное угловой скорости повосрота машины, которое интегрируется ин тегратором 13. На выходе интегратора 13 возникает напряжение, пропорционал ное углу поворота заданной траектории движения. Последнее с помощью сумматора 2 сравнивается с напряжением, пр порциональным, курсовому углу машины. Это напряженке формируется с помощью корректирующего устройства обратной связи системы, роль которого выполняет усилительное устройство 10. Характеристику усилительного устройства вы бирают в зависимости от требований, предъявляемых к характеристикам сиетемы в целом Усилительное устройство 10может быть как линейным, так и нелинейным звеном. Напряжение, пропорци ональное разности угла поворота траектории и курсового угла машины, поступает на первое множительное устройство 3 где оно перемножается с напря жением, пропорциональным линейной ско рости движения, снимаемой с датчика 11скорости прямолинейного движения. На выходе первого множительного устро 8 .4 ства 3 формируется напряжение, пропорциональное скорости смещения машины относительно поперечной оси трассы. Последнее поступает на рулевую машинку , которая с помощью кинопроектора 5 преобразует его в смещение изобрах ения на экране 6. Механик-водитель 7 фиксирует смещение изображения на экране 6. и. воздействует на рычаги В управления таким образом, чтобы предотвратить смещение изображения. Датчики 9 поворота фиксируют.положение рычагов 8 управления и формируют сигнал обратной связи, который затем преобразуется в усилительном устройстве 10. Таким образом, расширение функциональных возможностей предлагаемой следящей системы состоит в том, что она позволяет производить управление и в том случае, когда усилительнде устройство, стоящее D обратной связи системы, формирует сигнал, пропорциональный курсовому углу имитируемой машины. формула изобретения Следящая система .поворота проектора кинотренажера по авт.св. N- +51057 отличающаяся тем, что, с целью расширения функциональных возможностей системы , в ней установлены второе множительное устройство и интегратор, причем выход блока считывания топограммы соединен с первым входом сумматора через последовательно соединенные второе множительное устройство и интегратор, а выход датчика скорости прямолинейного движения подключен ко второму входу второго множительного устройства. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 51057, кл.С 05 В 17/01J 1972.
I.
