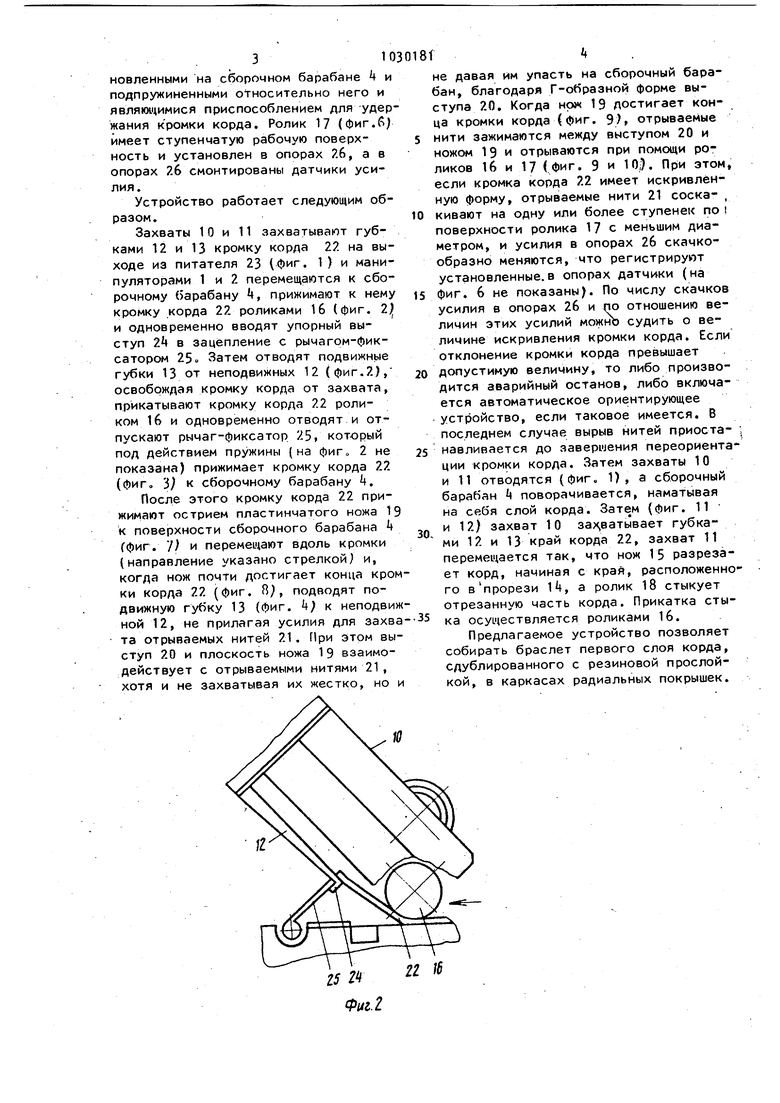
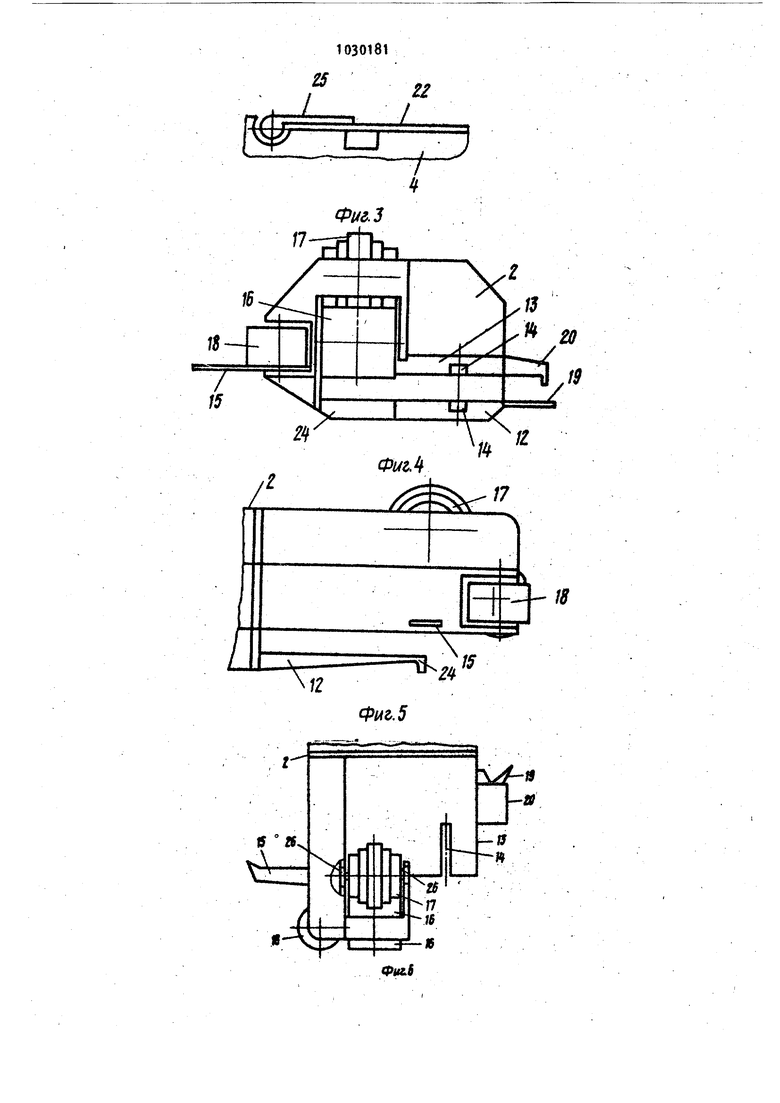
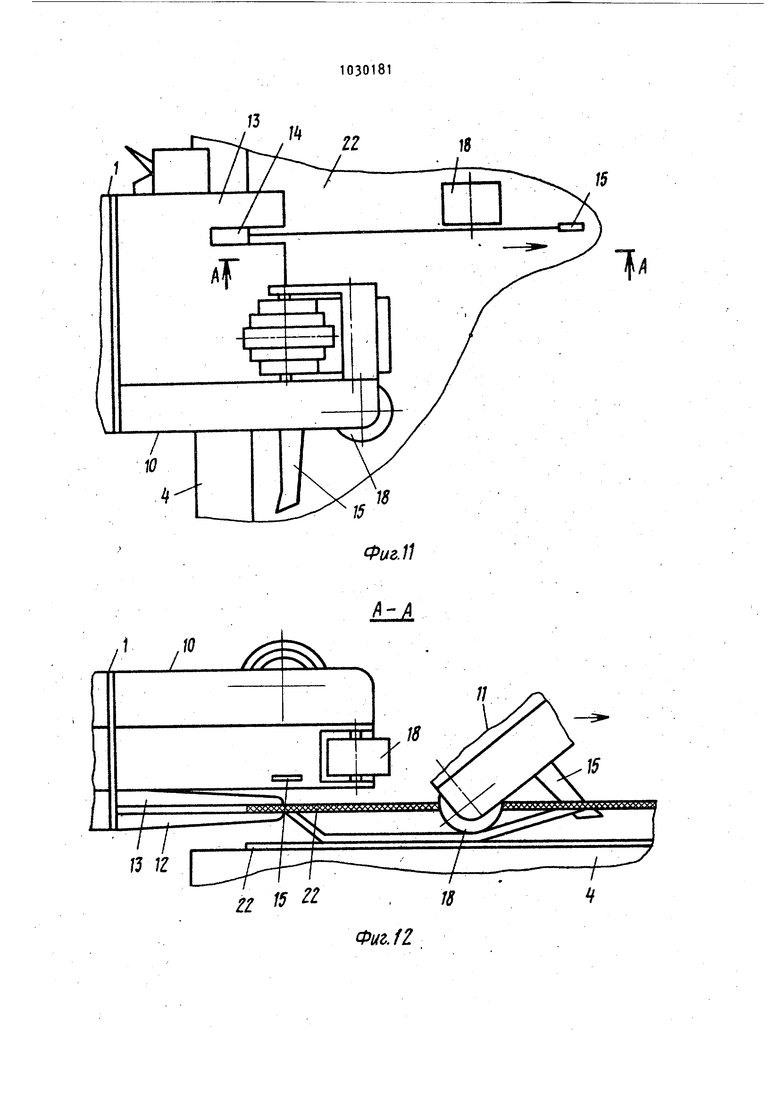
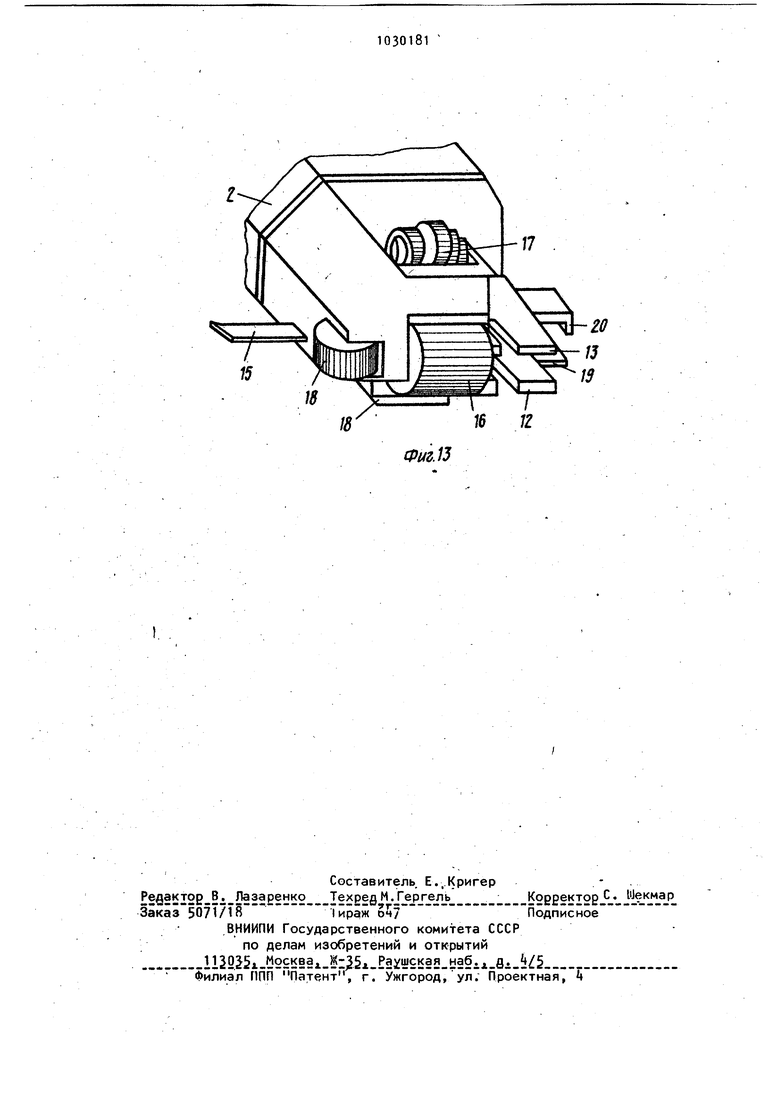
Изобретение относится к производству шин и может быть использовано в процессе сборки пневмопокрышек для сборки браслетов из обрезиненного ко да, сдублированного с резиновой прослойкой. Известно устройство для сборки браслетов из обрезиненного корда, со держащее центрирующий лоток, дублировочный ролик с приводом движения, нож с приводом, неподвижные схваты и подвижные схваты с приводом движения ij. Однако это Устройство громоздко и имеет большое число приводов. Наиболее близким по технической сущности к изобретению является устройство для наложения слоев корда на сборочный барабан, содержащее установленные на основании с торцов сборочного барабана манипуляторы со смон тирорчнными на их звеньях захватами в виде подвижных и неподвижных губок снабженных сквозной прорезью, и смон тированные на манипуляторах ножи для резки корда и дублировочные ролики и систему программного управления, связанную с манипуляторами fxj. Недостатком известного устройства является то, что оно не позволяет осуществлять вырыв нитей из кромки обрезиненного корда, закреплять кром ку первого слоя корда на сборочном б рабане, контролировать положение кро ки. Цель изобретения - обеспечение возможности вырыва нитей из кромки корда, а также обеспечение контроля положения кромки корда на сборочном барабане. Поставленная цель достигается тем что устройство для наложения слоев корда на сборочный барабан, содержащее установленные на основании с торцов сборочного барабана манипуляторы со смонтированными на их звеньях за хватами в виде подвижных и неподвижных губок, снабженных сквозной прорезью, и смонтированные на манипуляторах ножи для резки корда и дублировочные ролики и систему программного управления, связанную с манипуляторам снабжено смонтированными на манит -, пуЛяторах дополнительными роликами, подвижная губка по меньшей мере одного из захватов снабжена Г-образным выступом для взаимодействия с одной из плоскостей ножа, а неподвижная губка каждого из захватор снабжена упорным выступом для взаимодействия со смонтированным на сборочном барабане удерживающим кромку корда приспособлением. Кроме того, устройство снабжено датчиками усилия, дополнительные ролики выполнены со ступенчатой рабочей поверхностью и установлены в опорах, а датчики усилия смонтированы в опорах каждого из роликов по обе стороны от последних. На фиг. 1 изображена кинематическая схема манипуляторов и их расположение относительно сборочного барабана} на фиг. 2 - захват в момент закрепления кромки корда на сборочном барабане; на фиг. 3 закрепленная , на сборочномбарабане кромка корда; на фиг. Ц - захват, вид спереди; на фиг. 5 - то же, вид слева; на фиг.6 то же, вид сверху; на фиг. 7-10 - последовательность операций вырыва нитей из кромки корда; на фиг. 10 вид сверху элементов устройства, изображенных на фиг. 9; на фиг. 11 элементы устройства при отрезке и стыковке корда; на фиг. 12 - разрез А-А на фиг. 11; на фиг. 13 - захват, , аксонометрическая проекция. Манипуляторы 1 и . (фиг. 1) установлены на основании 3 у торцов сборочного барабана и имеют по пять степеней подвижности и по пять подвижных звеньев 5-9. Манипуляторы 1 и 2 оснащены соответственно захватами 10 и 11 одинаковой конструкции, каждый из которых имеет (фиг. -6) неподвижную 12 и подвижную 13 губку, снабженные прорезью Ik, пластинчатые ножи 15 для резки корда и дублировочные ролики 16-18. На неподвижной губке 12 по крайней мере одного из захватов установлен пластинчатый нож 19 а на подвижной губке 13 имеется Г-образный выступ 20 19 может быть расположен на звене 9 манипулятора также, как нож 15, в этом случае он будет взаимодействовать с развернутым выступом 20 при обратном ходе губки 1.), используемые для вырыва нитей 21 (фиг. 8-10| (3 кромки корда 22, подаваемого (фиг. 1) из питателя 23, расположенного над сборочным барабаном . На неподвижнь1х губках 12 (фиг. и 5) захватов 10 и 11 имеется упорный выстуг 2k f взаимодействующий при закреплении кромки корда 22 на сборочном барабане k с рычагамификсаторами 25 (фиг. 2 и 3), установленными на сборочном барабане и подпружиненными относительно него и являщимися приспособлением для удер жания кромки корда. Ролик 1 (фиг.) имеет ступенчатую рабочую поверхность и установлен в опорах .6, а в опорах .6 смонтированы датчики усилия. Устройство работает следующим образом. Захваты 10 и 11 захватывают губками 12 и 13 кромку корда 22 на выходе из питателя 23 1фиг. 1 ) и манипуляторами 1 и 2 перемещаются к сборочному барабану i, прижимают к нему кромку корда 22 роликами 16 (фиг. 2) и одновременно вводят упорный выступ Л в зацепление с рычагом-фиксатором 25 Затем отводят подвижные губки 13 от неподвижных 12 (фиг..), освобождая кромку корда от захвата, прикатывают кромку корда 22 роликом 1 6 и одновременно отводят и отпускают рычаг-фиксатор 25, который под действием пружины {на фиг„ 2 не показана) прижимает кромку корда 22 (фиг„ it) к сборочному барабану k, После этого кромку корда 22 прижимают острием пластинчатого ножа 19 к поверхности сборочного барабана 4 Гфиг. у) и перемем ают вдоль кромки (направление указано стрелкой) и, когда нож почти достигает конца кром ки корда 22 (фиг. В, подводят подвижную губку 13 (фиг. к неподвиж НОЙ 12, не прилагая усилия для захва
та отрываемых нитей 21. При этом выступ 20 и плоскость ножа 19 взаимодействует с отрываемыми нитями 21, хотя и не захватывая их жестко, но и
Предлагаемое устройство позволяет собирать браслет первого слоя корда, сдублированного с резиновой прослойкой, в каркасах радиальных покрышек.
22 /6 не давая им упасть на сборочный барабан, благодаря Г-образной форме выступа 20. Когда HOW 19 достигает конца кромки корда (фиг. 9)i отрываемые нити зажимаются между выступом 20 и ножом 19 и отрываются при помощи роликов 16 и 17 (фиг. 9 и 10}. При этом, если кромка корда 22 имеет искривлённую форму, отрываемые нити 21 соска- , кивают на одну или более ступенек по поверхности ролика 17 с меньшим диаметром, и усилия в опорах 2б скачкообразно меняются, что регистрируют установленные.в опорах датчики (на фиг. 6 не показаны). По числу скачков усилия в опорах 26 и по отношению величин этих усилий можнЪ судить о величине искривления кромки корда. Если отклонение кромки корда превышает допустимую величину, то либо производится аварийный останов, либо включается автоматическое ориентирующее устройство, если таковое имеется. В последнем случае вырыв нитей приоста- ; навливается до завершения переориентации кромки корда. Затем захваты 10 и 11 отводятся (фиг. 1), а сборочный барабан Ц поворачивается, наматывая на себя слой корда. Затем (фиг. 11 и 12) захват 10 зах,ватывает губками 12 и 13 край корда 22, захват 11 перемещается так, что нож 15 разрезает корд, начиная с края, расположенного впрорези k, а ролик 18 стыкует отрезанную часть корда. Прикатка осу1чествляется роликами 16.
а
/
гг
I
.З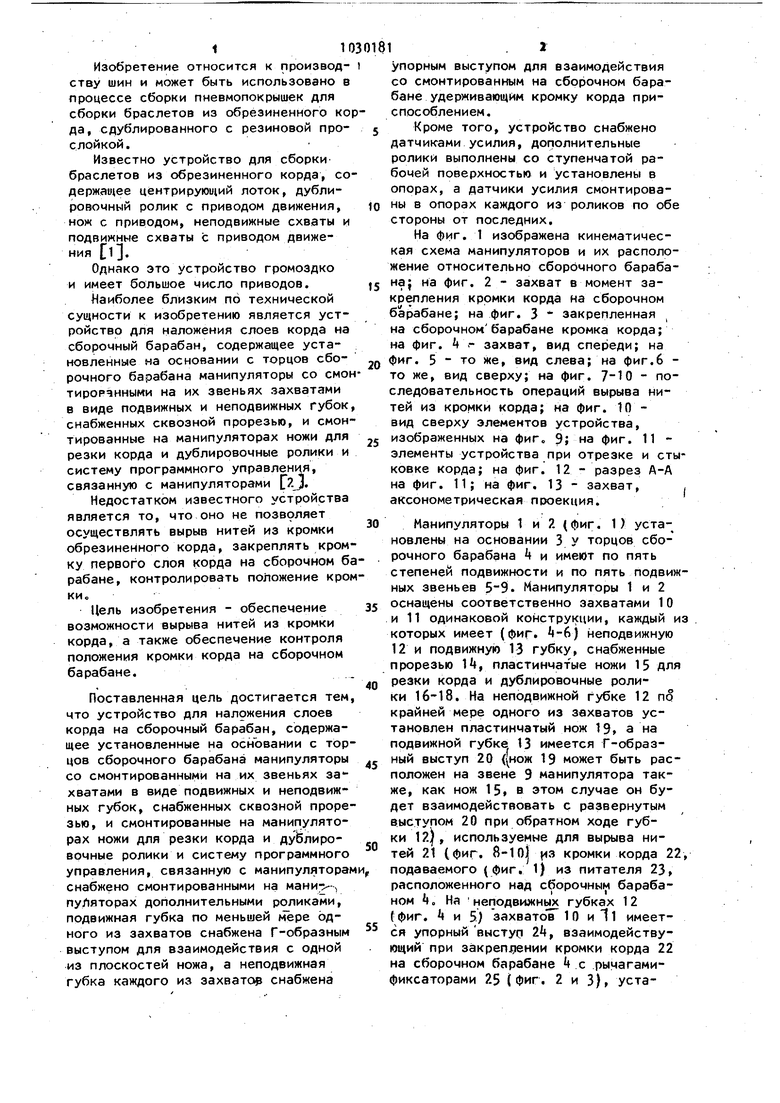
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сборки браслетов для покрышек пневматических шин и устройство для его осуществления | 1982 |
|
SU1030199A1 |
| Способ сборки браслетов для покрышек пневматических шин и устройство для его осуществления | 1981 |
|
SU973393A1 |
| Устройство для наложения слоев корда на сборочный барабан | 1980 |
|
SU939292A2 |
| Устройство для сборки покрышек пневматических шин | 1982 |
|
SU1098822A1 |
| Устройство для наложения слоев корда на сборочный барабан | 1980 |
|
SU929457A1 |
| Устройство для наложения слоев кордаНА СбОРОчНый бАРАбАН | 1978 |
|
SU806464A1 |
| Устройство для наложения слоев корда на сборочный барабан | 1980 |
|
SU927549A2 |
| Устройство для подачи и наложения полос корда на сборочный барабан | 1983 |
|
SU1118545A1 |
| Устройство для наложения слоев корда на сборочный барабан | 1989 |
|
SU1666351A1 |
| Устройство для наложения слоев корда на сборочный барабан | 1986 |
|
SU1353660A1 |
1. УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ СЛОЕВ КОРДА НА СБОРОЧНЫЙ БАРАБАН, содержащее установленные на основании с торцов сборочного барабана манипуляторы со смонтированными на их звеиьях захватами в виде подвижных и неподвижных губок, снабженных сквозной прорезью, и смонтированные на манипуляторах ножи для резки корда и дубли| воцные ролики и систему программноfo управления, связанную с манипуляfopaMH, отличающееся тем, что, с целью обеспечения возможности вырыва нитей иЗ кромки корда, оно снабжено смонтированными на манипуляторах дополнительными роликами, по.движная губка по меньшей мере одного из захватов снабжена Г-образным выступом для взаимодействия с одной из плоскостей ножа, а неподвижная губка каждого из захватов снабжена упорным выступом для взаимодействия со смонтированным на сборочном барабане удерживающим кромку корда приспособлением. 2. Устройство поп, 1, отли чающееся тем, что, с целью ; обеспечения контроля положения кромки корда на сборочном барабане, оно. снабжено датчиками усилия, дополни(Л тельные ролики выполнены со ступенчатой рабочей поверхностью и установс лены в опорах, а датчики усилия смон;тированы в опорах каждого из роликов 5 по обе стороны от последних.
f
V / V4
Фиг.
Фи.5
Е
гаff
Ф«г;7
Фи1.8
.5
ФигМ
/bd
Фиг. 11
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для НАЛОЖЕНИЯ ПОЛОС КОРДА НА СБОРОЧНЫЙ БАРАБАН ДЛЯ ПНЕВМАТИЧЕСКИХ ШИН | 0 |
|
SU233218A1 |
| Солесос | 1922 |
|
SU29A1 |
| , 2 о Авторское свидетельство СССР по заявке № 3004656/23-05, кл | |||
| Солесос | 1922 |
|
SU29A1 |
