(5) ГРУЗОПОДЪЕМНАЯ ПЛОЩАДКА КРАНА-ШТАБЕЛЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| Грузоподъемная площадка крана- шТАбЕлЕРА | 1978 |
|
SU796128A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU981129A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Склад для хранения штучных грузов | 1983 |
|
SU1152891A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| Склад для хранения штучных грузов | 1985 |
|
SU1324958A1 |
| Кран-штабелер для длинномерных грузов | 1979 |
|
SU867818A1 |
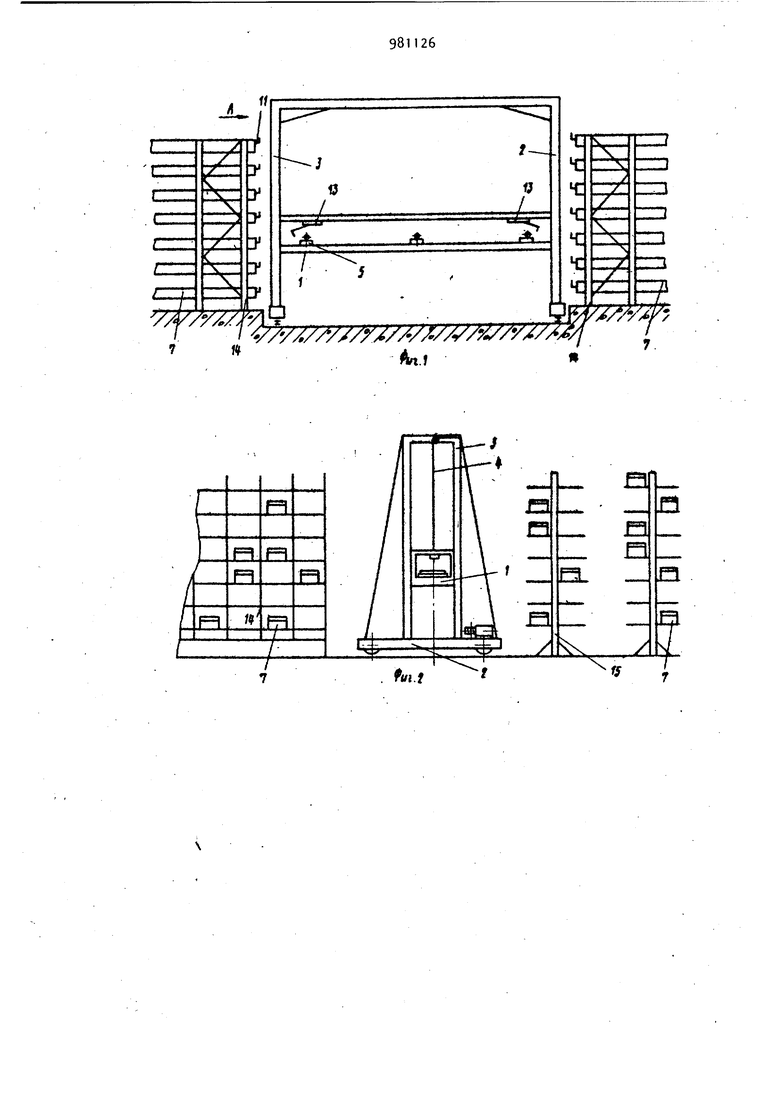


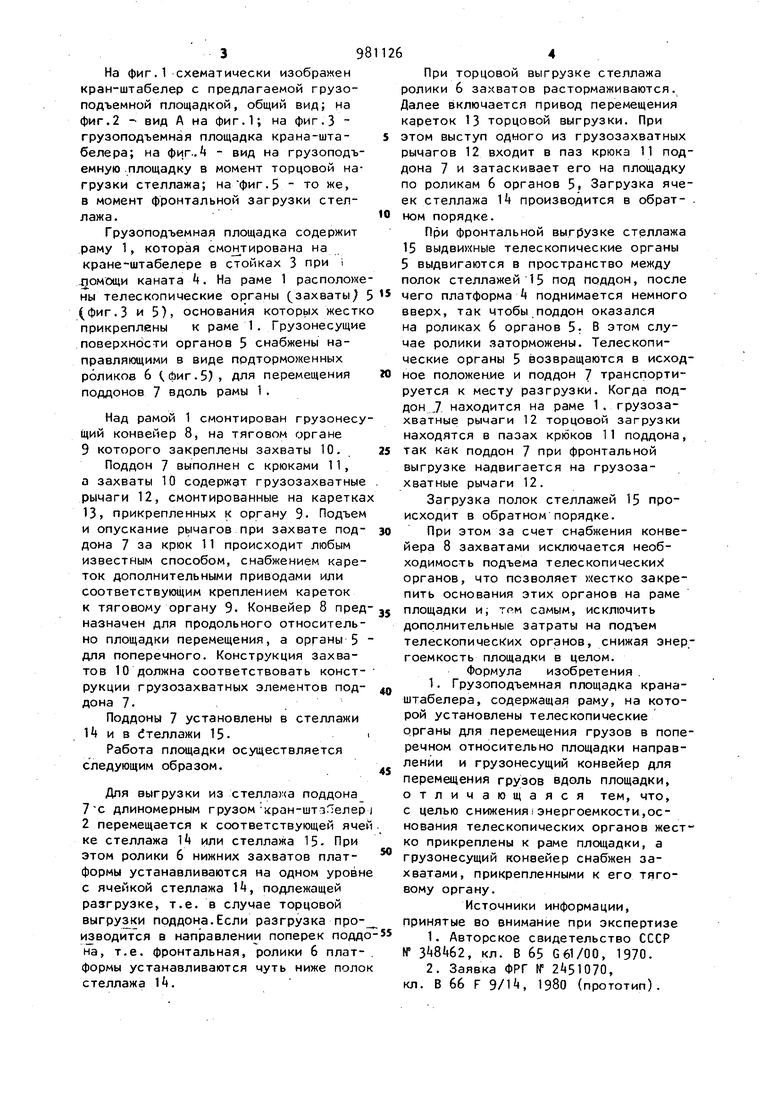
Изобретение относится к оборудованию складов штучных грузов, в частности к грузоподъемным площадкам кранов-штабелеров, и может быть использовано в различных отраслях промышленности для обслуживания стеллажных складов. Известна грузоподъемная площадка содержащая райу на которой смонтирован конвейер с грузозахватными рычагами. Известная площадка позволяет вытягивать поддоны с грузом из ячеек стеллажей или заталкивать их в ячейки11. Однако эта площадка может обслужи вать только стеллажи, ячейки которых расположены соосно продольной оси и площадки и не может обслуживать стеллажи,i ячейки которых расположены перпендикулярно продольной оси площадки. Известна грузоподъемная площадка, содержащал раму, на которой установлены телескопические органы для перемещения грузов в поперечном относительно площадки направлении и грузонесущий конвейер для перемещения грузов вдоль площадки. Известная площадка позволяет перемещать грузы в двух взаимно перпендикулярных направлениях по отношению к ней 2 J Однако для этого необходимо снабжать раму подъемно-опускным устройством для передачи грузов с конвейера на телескопические органы. Поскольку подъем органов с грузами требует затраты дополнительной мощности, энергоемкость площадки увеличивается. Цель изобретения - снижение энергоемкости. Цель достигается тем, что,основания телескопических органов жестко прикреплены к раме площадки, а грузонесущий конвейер снабжен захватами, прикрепленными к его тяговому органу. 39 На фиг.1 схематически изображен кран-штабелер с предлагаемой грузоподъемной площадкой , общий вид; на фиг.2 - вид А на фиг.1; на фиг.З грузоподъемная площадка крана-штабелера; на фиг-А - вид на грузоподъемную площадку в момент торцовой нагрузки стеллажа; нафиг.5 - то же, в момент фронтальной загрузки стеллажа. Грузоподъемная площадка содержит раму 1, которая смо тирована на кране-штабелере в стойках 3 при i .домощи каната +. На раме 1 расположе ны телескопические органы (захваты (фиг.З и 5), основания которых жестк прикреплены к раме 1. Грузонесущие поверхнбсти органов 5 снабжены направляющими в виде прдторможенных роликов 6 (,фиг.5), для перемещения поддонов 7 вдоль рамы 1. Над рамой 1 смонтирован грузонесу Щий конвейер 8, на тяговом органе 9 которого закреплены захваты Ю. Поддон 7 выполнен с крюками 11, а захваты 10 содержат грузозахватные рычаги 12, смонтированные на каретка 13, прикрепленных к органу 9. Подъем и опускание рычагов при захвате поддона 7 за крюк 11 происходит любым известным способом, снабжением кареток дополнительными приводами или соответствующим креплением кареток к тяговому органу 9. Конвейер 8 пред назначен для продольного относительно площадки перемещения, а органы 5 для поперечного. Конструкция захватов 10 должна соответствовать конструкции грузозахватных элементов поддона 7. Поддоны 7 установлены в стеллажи 14 и в йтеллажи 15. Работа площадки осуществляется следующим образом. Для выгрузки из стеллажа поддона 7С длиномерным грузомхран-штзЛелер 2 перемещается к соответствующей яче ке стеллажа 1 или стеллажа 15- При этом ролики 6 нижних захватов платформы устанавливаются на одном уровн с ячейкой стеллажа 14, подлежащей разгрузке, т.е. в случае торцовой выгруз ки поддона.Если разгрузка производится в направлении поперек поддо на, т.е. фронтальная, ролики 6 платформы устанавливаются чуть ниже поло стеллажа 1А. При торцовой выгрузке стеллажа ролики 6 захватов растормаживаются. Далее включается привод перемещения кареток 13 торцовой выгрузки. При этом выступ одного из грузозахватных рычагов 12 входит в паз крюка 11 поддона 7 и затаскивает его на площадку по роликам 6 органов S, Загрузка ячеек стеллажа 1 производится в обрат- . ном порядке. При фронтальной выг0узке стеллажа 15 выдви хные телескопические органы 5 выдвигаются в пространство между полок стеллажей 15 под поддон, после чего платформа поднимается немного вверх, так чтобы поддон оказался на роликах 6 органов 5; В этом случае ролики заторможены. Телескопические органы 5 возвращаются в исходное положение и поддон 7 транспортируется к месту разгрузки. Когда поддон .7. находится на раме 1. грузозахватные рычаги 12 торцовой загрузки находятся в пазах крюков 11 поддона, так как поддон 7 при фронтальной выгрузке надвигается на грузозахватные рычаги 12. Загрузка полок стеллажей 15 происходит в обратном порядке. При этом за счет снабжения конвейера 8 захватами исключается необходимость подъема телескопических органов, что позволяет жестко закрепить основания этих органов на раме площадки и; тг-м самым, исключить дополнительные затраты на подъем телескопических органов, снижая энергоемкость площадки в целом. Формула изобретения . 1. Грузоподъемная площадка кранаштабелера, содержащая раму, на которой установлены телескопические органы для перемещения грузов в поперечном относительно площадки направлении и грузонесущий конвейер для перемещения грузов вдоль площадки, отличающаяся тем, что, с целью снижения энергоемкости,основания телескопических органов жестко прикреплены к раме площадки, а грузонесущий конвейер снабжен захватами, прикрепленными к его тяговому органу. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 3i8i 62, кл. В 65 G61/00, 1970. 2.Заявка ФРГ № 2 451070, кл. В 66 F 9/1, 1980 (прототип).
пь
19
/
W
J
LJ
ti
.«
