(54) АВТОМАД-ИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ДЛИННОМЕРНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое захватное устройство | 1982 |
|
SU1030298A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захват для подъема цилиндрических грузов | 1975 |
|
SU672138A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ДЛИННОМЕРНЫХ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1999 |
|
RU2164492C1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Грузозахватное устройство | 1984 |
|
SU1237607A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для грузов с отбортовкой | 1983 |
|
SU1085925A1 |
1
Изобретение относится к погрузочноразгрузочным работам, в частности к автоматическим захватный устройствам для длинномерных грузов.
Известно автоматическое захватное устройство для длинномерных грузов, содержащее две пары захватных рычагов, шарнирно закрепленных на балках, траверсу, подвешиваемую к грузоподъемной машине, и механизм фиксации рычагов в раскрытом положении, включающий три телескопически связанные между собой ползуна, наружный из которых снабжен поворотной звездочкой, взаимодействующей с толкателем, закрепленным на внутреннем ползуне, при этом, средний и внутренний ползуны выполнены с продольными пазами 1.
Однако известное устройство не обеспечивает захват грузов с переменным поперечным сечением по длине.
Цель изобретения - расширение технологических возможностей путем обеспечения захвата грузов с переменным поперечным сечением по длине.
Указанная цель достигается тем, что устройство снабжено дополнительным механизмом фиксации, при этом внутренние
телескопические ползуны каждого из механизмов фиксации жестко закреплены на балках соответствующей пары рычагов, средние ползуны жестко закреплены на траверсе, а к последней шарнирно подвешено коромысло, концы которого шарнирно связаны с кулисами, установленными в направляющих, жестко прикрепленных к наружным телескопическим цилиндрам соответствующих механизмов фиксации.
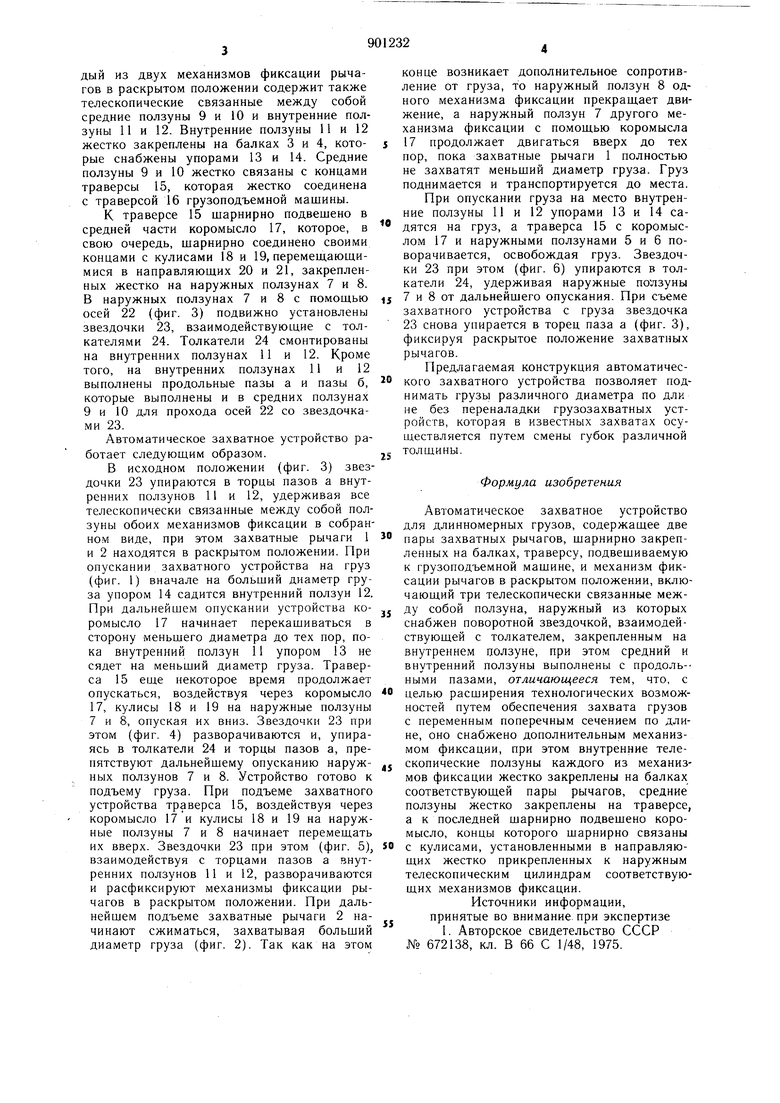
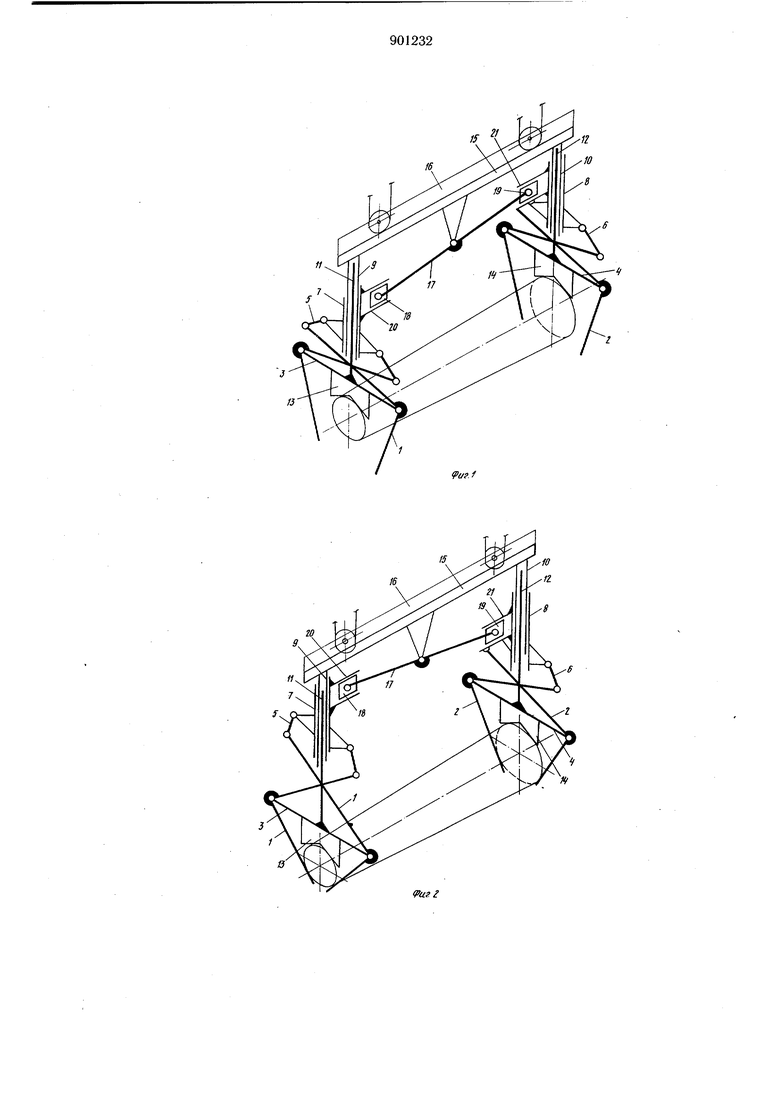
На фиг. 1 изображена схема грузозахватного устройства в исходном положении; на фиг. 2 - то же, в момент подъема груза; на фиг. 3 - механизм фиксации рычагов грузозахватного устройства
15 в исходном положении; на фиг. 4 - то же, в момент установки устройства на груз; на фиг. 5 - то же, в момент подъема груза; на фиг. 6 - то же, после опускания груза.
Автоматическое захватное устройство содержит (фиг. 1) две пары захватных рычагов 1 и 2, шарнирно закрепленных на балках 3 и 4 и связанных тягами 5 и 6 с наружными ползунами 7 и 8 механизмов фиксации рычагов в раскрытом положении. Каждый из двух механизмов фиксации рычагов в раскрытом положении содержит также телескопические связанные между собой средние ползуны 9 и 10 и внутренние ползуны 11 и 12. Внутренние ползуны 11 и 12 жестко закреплены на балках 3 и 4, которые снабжены упорами 13 и 14. Средние ползуны 9 и 10 жестко связаны с концами траверсы 15, которая жестко соединена с траверсой 16 грузоподъемной машины. К траверсе 15 шарнирно подвешено в средней части коромысло 17, которое, в свою очередь, шарнирно соединено своими концами с кулисами 18 и 19, перемеш.аю1димися в направляющих 20 и 21, закрепленных жестко на наружных ползунах 7 и 8. 8наружных ползунах 7 и 8 с помощью осей 22 (фиг. 3) подвижно установлены звездочки 23, взаимодействующие с толкателями 24. Толкатели 24 смонтированы на внутренних ползунах 11 и 12. Кроме того, на внутренних ползунах 11 и 12 выполнены продольные пазы а и пазы б, которые выполнены и в средних ползунах 9и 10 для прохода осей 22 со звездочками 23. Автоматическое захватное устройство работает следующим образом. В исходном положении (фиг. 3) звездочки 23 упираются в торцы пазов а внутренних ползунов 11 и 12, удерживая все телескопически связанные между собой ползуны обоих механизмов фиксации в собранном виде, при этом захватные рычаги 1 и 2 находятся в раскрытом положении. При опускании захватного устройства на груз (фиг. 1) вначале на больший диаметр груза упором 14 садится внутренний ползун 12. При дальнейшем опускании устройства коромысло 17 начинает перекашиваться в сторону меньшего диаметра до тех пор, пока внутренний ползун 11 упором 13 не сядет на меньший диаметр груза. Траверса 15 еще некоторое время продолжает опускаться, воздействуя через коромысло 17, кулисы 18 и 19 на наружные ползуны 7 и 8, опуская их вниз. Звездочки 23 при этом (фиг. 4) разворачиваются и, упираясь в толкатели 24 и торцы пазов а, препятствуют дальнейшему опусканию наружных ползунов 7 и 8. Устройство готово к подъему груза. При подъеме захватного устройства траверса 15, воздействуя через коромысло 17 и кулисы 18 и 19 на наружные ползуны 7 и 8 начинает перемешать их вверх. Звездочки 23 при этом (фиг. 5), взаимодействуя с торцами пазов а внутренних ползунов И и 12, разворачиваются и расфиксируют механизмы фиксации рычагов в раскрытом положении. При дальнейшем подъеме захватные рычаги 2 начинают сжиматься, захватывая больший диаметр груза (фиг. 2). Так как на этом конце возникает дополнительное сопротивление от груза, то наружный ползун 8 одного механизма фиксации прекращает движение, а наружный ползун 7 другого механизма фиксации с помощью коромысла 17 продолжает двигаться вверх до тех пор, пока захватные рычаги 1 полностью не захватят меньший диаметр груза. Груз поднимается и транспортируется до места. При опускании груза на место внутренние ползуны 11 и 12 упорами 13 и 14 садятся на груз, а траверса 15 с коромыслом 17 и наружными ползунами 5 и б поворачивается, освобождая груз. Звездочки 23 при этом (фиг. 6) упираются в толкатели 24, удерживая наружные ползуны 7 и 8 от дальнейщего опускания. При съеме захватного устройства с груза звездочка 23 снова упирается в торец паза а (фиг. 3), фиксируя раскрытое положение захватных рычагов. Предлагаемая конструкция автоматического захватного устройства позволяет поднимать грузы различного диаметра по длк не без переналадки грузозахватных устройств, которая в известных захватах осуществляется путем смены губок различной толщины. Формула изобретения Автоматическое захватное устройство для длинномерных грузов, содержащее две пары захватных рычагов, щарнирно закрепленных на балках, траверсу, подвещиваемую к грузоподъемной мащине, и механизм фиксации рычагов в раскрытом положении, включающий три телескопически связанные между собой ползуна, наружный из которых снабжен поворотной звездочкой, взаимодействующей с толкателем, закрепленным на внутреннем ползуне, при это.м средний и внутренний ползуны выполнены с продоль-ными пазами, отличающееся тем, что, с целью расщирения технологических возможностей путем обеспечения захвата грузов с переменным поперечным сечением по длине, оно снабжено дополнительным механизмом фиксации, при этом внутренние телескопические ползуны каждого из механизмов фиксации жестко закреплены на балках соответствующей пары рычагов, средние ползуны жестко закреплены на траверсе, а к последней шарнирно подвешено коромысло, концы которого шарнирно связаны с кулисами, установленными в направляющих жестко прикрепленных к наружным телескопическим цилиндрам соответствующих механизмов фиксации. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 672138, кл. В 66 С 1/48, 1975.
а
го
// ю
15
10
п
Уиг I
