(Л
со
05 QD
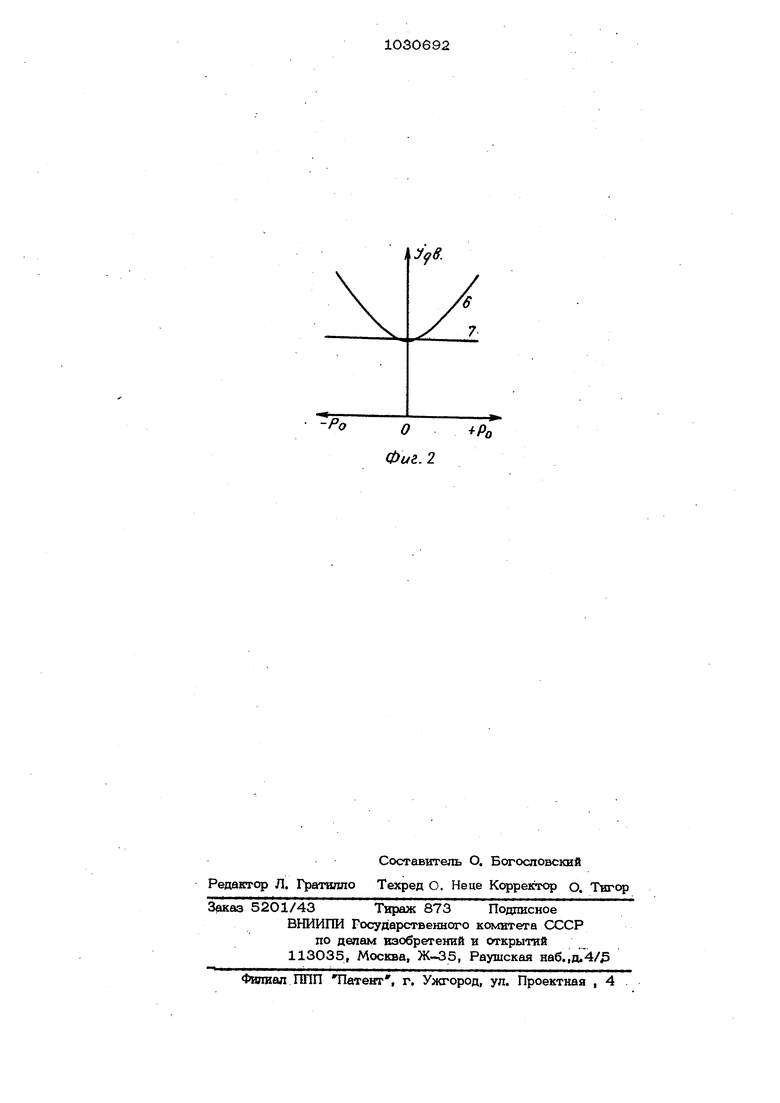
фаг f : Изобретение относится к диагностике ; технического состояния автомобилей и ка сается способов опредепешш углов установки колес управляемых осей. Наиболее близким к изобретению по технической сущности является способ, включающий изменение углов установки колес на вращающихся беговых бараба нах, снабженных раздельным электричес гаш приводом для каждого колеса оси, до предельного положения, при котором боко вые реакцтщ опорных поверхностей колес ; rинимaльны 1 3 . Недостатком известного способа являет ся высокая сложность, поскольку дан его осуществления необходим специальный стенд с барабанами, подвижщ 1мк в осевом направлешш, установленными с ностью поворота их осей вращения и снаб женными приводом поворота, а также со сложной аппаратурой для регистрации результатов измерения и управления привоЦелью изобретения является расширение области применения и снижение затра на обслу:на1вание автомобилей. Указанная цель достит ается тем, чтЬ согласно способу определения углов схождения колес управляемой оси автомобиля, заключающемуся в том, что изменяют угол установки колес оси на вращающихся I беговых барабанах, снабженных раздельным электрическим приводом для. каждого . колеса оси, до предельного положения, при котором боковые реакции опорных поверхностей колес оси мтп-гамальны, утоп схождения определяют по величине перемещения элементов рулевого управления при повороте рулевого колеса на угол, ог раниченный предельными положениями оси при которых электродвигатели приводов потребляют raнимyм тока. На фиг. 1шображена схема устройства, реализующего способ; на фиг. 2 - график поясняющий зависимость тока, потребляемого электродвигателями приводов беговых барабанов от угла поворота рулевого управления. Для осуществления способа колеса 1 и 2 управляемой оси 3 автомобиля устанавливают на беговые барабаны 4 и 5, кинематически связанные с электромоторами привода вращения (.не показан ). Затормаживая одну из пар барабанов, например 4, приводят во вращение другую пару барабанов, например 5. Затем, вращая рулевое колесо, поворачивают колесо 1 и 2 на барабанах 4 и 5. Поскольку составляющая сопротивления вращению колес на барабанах , обусловленная действием боковых сил, возникающих при установке колеса со сходом и развалом, зависит от относительного положения осей вращения колес и барабанов, поворот колеса 2 приводит к изменению нагрузки на электродвигатель привода барабанов 5, которое, в свою очередь, изменяет силу потребляемого электродвигателем тока (кривая 6) по зависимости, изображенной на графике (нг. 2), где D дв - уровень потребляемого электродвигателем привода беговых барабанов тока; Ррбоковая сила, обусловленная действием схождения. Когда колесо 2 на беговых барабанах 5 занимает положение, при котором боковые силы от схождения равны нулю, величина тока минимальна. Уровень минимального тока указан на графике прямой 7. При достижении наименьшего значения тока к рулевой тяге 8 подсоединяют установленный на нуль проектор, световой луч 9 которого направлен на экран 1О. На экране 10 вьшолнена нулевая отмет-, ка 11 со щкалой , градуированной в единидах измерения схождения. После этого в той же последовательности устанавливают на лшнимум тока электродвигатель барабанов 4 колеса 1. Луч проектора при этом смещается на экране 10 в точку 12. По величине отклонения луча проектора судят о величине схождения колес управляемой оси автомобиля. Предложены и способ снюкаетзатраты на проверку углов установки колес управ-, ляемой оси автомобиля, так как может быть осуществлен на любом стенде, име ющем раздельный привод беговых барабанов . При этом не требуется введение в конструкцию стенда устройств, фиксирующих автомобиль от смещения, поскольку ддя этой цели могут быть использованы заторможенные беговые барабаны остановленного колеса автомобиля.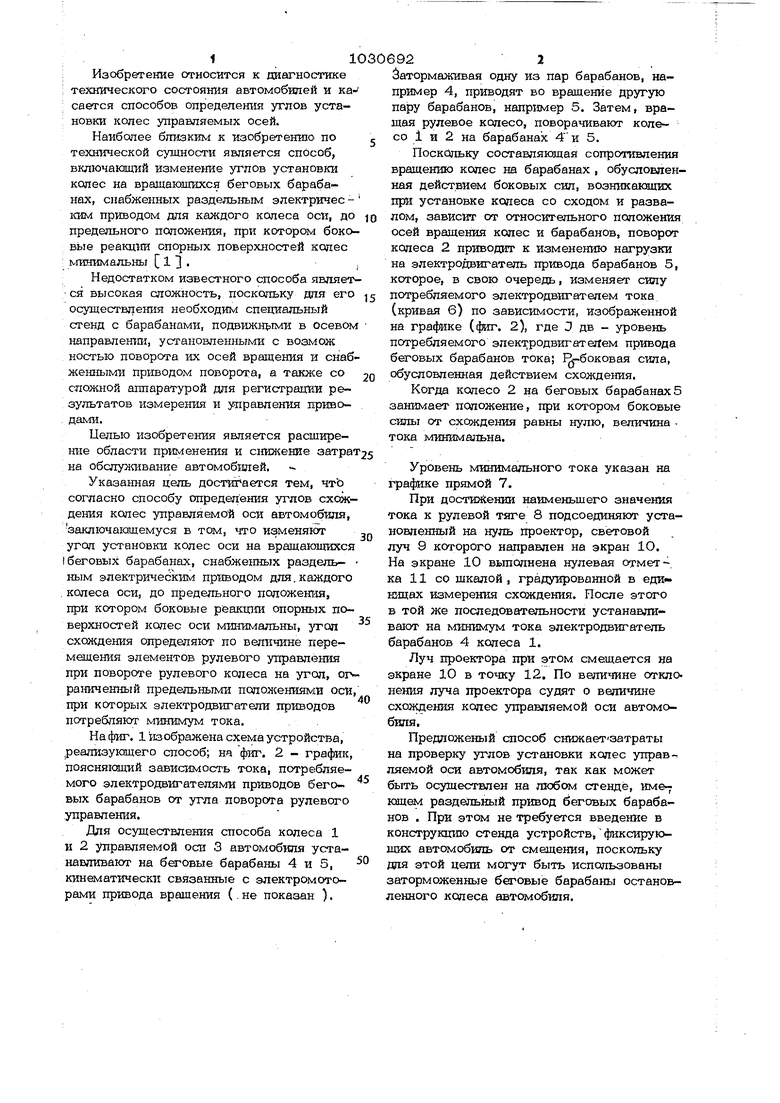
СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ СХОЖДЕНИЯ КОЛЕС УПРАВЛЯЕМОЙ ОСИ АВТОМОБИЛЯ, заключающийся в том, что изменяют угол установки колес оси на вращающихся беговых барабанах, снабженных раздельным электрическим приводом дгш каждого колеса, до предельного положения, при котором боковые реакции опорных поверхностей колес оси минимальны, отличающийся тем, что, с целью расширения области применения и снижения затрат на обслуживание автомобилей, угол схождения определяют по величине перемещения элементов рулевого управления при повороте рулевого колеса на угол, ограниченный предельными положениями оси, при которых электродвигатели приводов потребляют минимум тока.
О+РО
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США №3187440, кп | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
