2. Устройство по п. 1, отличающееся тем, что } Ц1 ональный преобразователь выполнен в виде последовательно ссади нённых второго блока сравнения, второго звена ограничения, второ--. го интегратора, TpeTberQ,блока сравнения, третьего интегратора, .корректирующего эвена и сумматора,
второй вход которого соединен с выходом второго эвена ограничения и выход второго интегратора соединен с входом второго блока сравнения I причем первый вход второго ,блока сравнения является входом функциона-пьного преобразователя, а. ;Выход сумматора является выходом функционального преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения параметров движения шахтных подъемных машин при аварийном торможении | 1990 |
|
SU1754612A1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332497A1 |
| Электропривод постоянного тока | 1990 |
|
SU1786628A1 |
| Устройство для управления позиционным электроприводом | 1977 |
|
SU714352A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1306871A2 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |

Изобретение относится к устройс вам для управления электроприводом и предназначено для формирования сигнала задания скорости в систеиах автоматического управления ас|йнхронным приводом шахтных подъемвых машин и аналогичных подъемно - транспортных механизмов в режиме; динамического торможения. : известно устройство для програм мирования скорости, содержащее рета дирующий диск и вращающийся трансформатор. Ретардирующий диск механически соединен с указателем, -глубины, В границах угла, соответстёующего пути замедления, диск имеет специальный профиль, с помощью которого осуществляется пово рот вращакяцегося трансформатора, вьфабатывающего напряжения задания скорйсти в функции пути, пройденного подъемным сосудом {,i Однако устройство состоит из нескольких 1 5еханических элементов , частые остановки и пуски привода приводят к износу и расстройству сойряжений звеньев, расчетный профиль не удается точно реализовать по условиям работы кинематики звень в, что существенно снижает точность работы устройства. Наиболее близким к изобретению по технической сущности является усТрс5йство для программирования скорости, содержащее последовательно соединенные управляемый ключ, блфк сравнения, звено ограничения и интегратор, выход которого подкл Ьчен к второму входу блока сравнения.. Однако использование известного .ус.ройства в схеме динамического то5 можения подъемной установки при к значительньш погрешностям в Отработке заданного тормозного пути. Это связано с наличием так называемого периода дуговой блокировки продолжительностью 0,5-1 с, который следует после отключения двигателя от сети переменного тока и. необходим для гашения дуги и вос становления диэлектрической прочно ти воздушного промежутка у резомкнувшегося контакта реверсора. Отключение двигателя от сети происходит при срабатывании путевого выключателя, -расположенного в стволе шахты, а необходимую выдержку времени обеспечивает специально вводимое в схему реле времени. В период дуговой блокировки система движется свободно, характер этого движения определяется статической нагрузкой привода, которая изменяется от цикла к циклу. В результате путь, проходимый подъемными, сосудами за время дуговой блокировки, и угловая скорость привода в момент включения динамического торможения зависят от статической нагрузки. Все это приводит к тому, что тормозной путь сосуда при спуске груза еюльше, а при подъеме меньше, чем соответствующий путь при отсутствии статической нагрузки. Имеет место значительный разброс тормозного пути, и точность работы системы динамического торможения-f низкая. Поэтому для обеспечения точной остановки сосуда на уровне разгрузки необходимо удлинить путь дотягивания, что приводит к снижению производительности подъемной установки. Целью изобретения является уве личение точности работы и повышение производительности подъемной установки. Указанная цель достигается тем, что в устройство дополнительно введены последовательно соединенные датчик нагрузки привода и функциовальный преобразователь, причем выход функционального преобразователя подк;.1ючен к второму входу звена ограничения. Кроме того, функциональный пре . образователь выполнен в виде последовательно соединенных второго блока сраЕнения, в.торого звена ограничения, второго интегратора, третьего блока сравнения, третьего интегратора, корректирующего звена и сумматора, второй вход которого
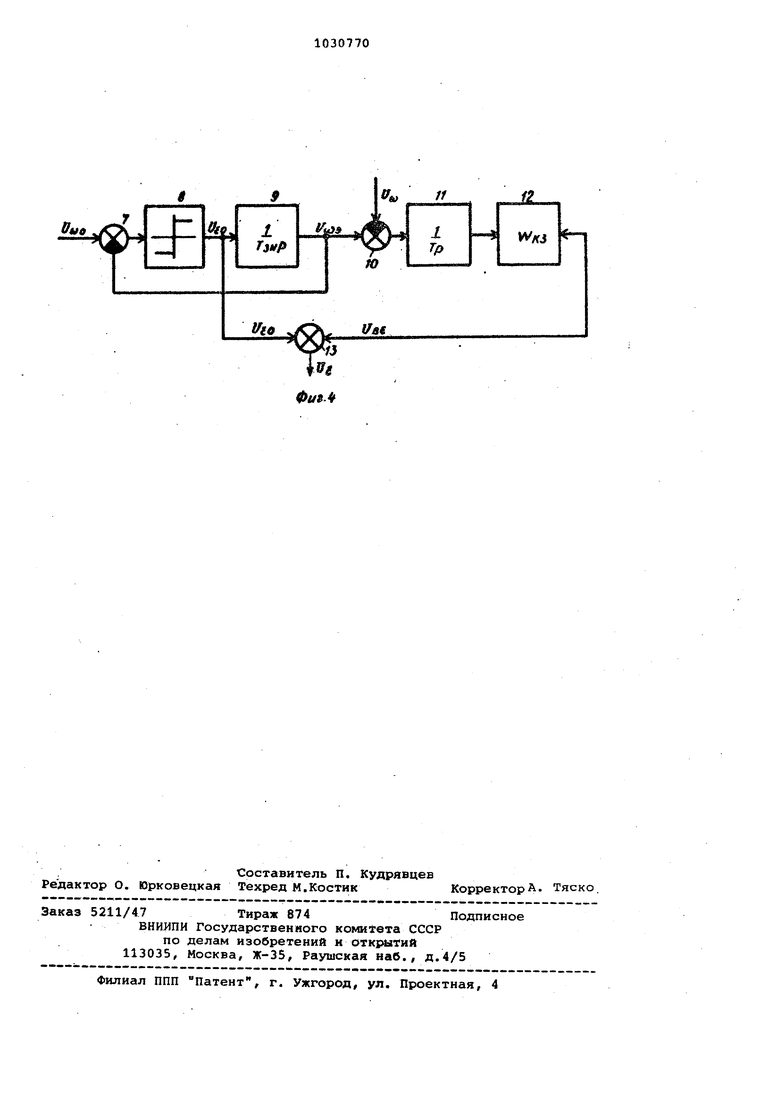
соединен с выходом второго эвена ограничения, и выход второго интегратора соединен с входом второго блока сравнения, причем первый вход второго блока сравнения является входом функционального преобразователя, -а выход, сумматора является выходом функционального преобразователя.
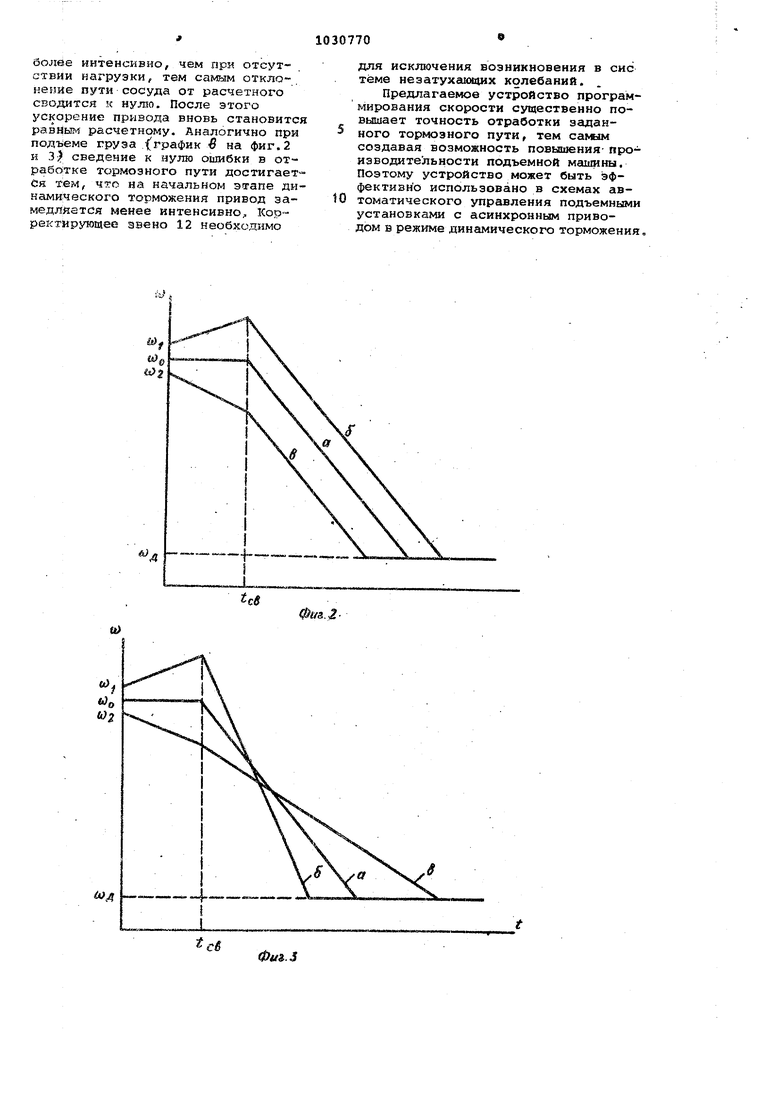
На фиг. 1 показано устройство для програмг.ирозания скорости; на фиг. 2 и 3 - примерные тахограммы работы привода подъемной мгииины в режиме замедления соответственно при торможении с неизменным ускорением и при использовании предлагаемо ID устройства программирования скорости) на фиг. 4 - блоксхема функционального преобразователя.
Устройство содержит управляемый ключ 1, блок 2 сравнения, звено 3 ограничения, интератор 4, датчик 5 нагрузки привода, функциональный преобразователь 6.
Функциональный преобразователь 6 содержит второй блок 7 сравнения, второе звено 8 ограничения, второй интегратор 9, третий блок 10 сравнения, третий интегратор 11, корректирующее звено 12, сумматор 13,
Устройство работает следующим образом.
До момента включения динамического торможения на вход блока 2 сравнения через замкнутый ключ 1 подается напряжение обратной связи по скорости привода )- Это необходимо для того, чтобы в момент включения динамического торможения напряжениена выходе задатчика интенсивности в точности соответствовало фактическому значению скорости привода в этот момент . После окончания периода дуговой блокировки дается команда на включение системы динамического торможения и одновременно на размыкание ключа 1, При этом происходит отключение входа блока 2 сравнения от напря.женияи д) и формируется линейно спадающее напряжение U(,jjy причем величина заданного ускорения зависит от статической нагрузки привода Если последняя отсутствует, выходной сигнал датчика 5 нагрузки привода равен нулю и напряжение на выходе функционального преобразов.ателя б соответствует расчетному значению, ускорения привода о при торможении без нагрузки: . Напряжение на выходе задатчкка интенсивности в этом случае в определенном масштабе повторяет форму графика а (фиг. 2 и з), соответствующего торможению при отсутствии статической нагрузки.
На фиг. 2 и 3 приняты следующие обозначения: to - угловая скорость
двигателя, - синхронная угловая скорость двигателя, Шд, - угловая скорость дотягивания, beg- время дуговой блокировки.
Если торможение происходит при
наличии статической нагрузки, то сигналы на выходе датчика 5 нагруз- ки привода и на выходе функционального преобразователя б изменятся: таким образом, чтобы обеспечить
прохождение подъемным сосудом неизменного тормозного пути. В частности, при спуске груза tJ(y, О ,Uc Kt/4: при подъеме грузаО тО, 0 7 Ug .
При частной реализации функцио-
нального преобразователя б (фиг. Ч устройство работает следующим образом.
До момента включения динамического торможения на вход второго
б-лока 7 сравнения подается напряжение (,, пропорциональное синхронной угловой скорости, а на вход блока 2 сравнения - напряжение обратной связи по скорости привода Ущ . Таким образом, в момент
включения динамического торможения, напряжение на выходе интегратора 9 не зависит от фактической скорости привода, а на выходе интегратора 4 в точности соответствует фактическому значению скорости привода в конце периода дуговой блокировки. В момент включения динамического торможения происходит отключение входов блоков 2 и 7 сравнения соответственно от напряжений U(,,H 0(у. На выходе интегратора 9 . формируется неизменное во всех режимах напряжение, повторяющее в
определенном масштабе форму Трафика О (фиг. 2), соответствующего торможению при отсутствии статической нагрузки. Если статическая нагрузка привода равна нулю, U(, U(y в течение всего периода дуговой
блокировки, и сигнал на выходе блока 10 сравнения равен нулю, соот1ветственно в момент включения динамического торможения Од-2. OjUc-Oe .и напряжение задания скорости на
выходе интегратора 4 повторяет
форму выходного напряжения интегратора 9.
Если торможение происходит при наличиистатической нагрузки, например, при спуске груза ( график сГ на фиг. 2 и 3) то в период дуговой блокировки привод разгоняется, УСУ cUijuo напряжение на выходе интегратора 11 в момент включения динамического торможения пропорционально отклонению тормозного пути подъемного сосуда от расчетного. Соответственно, ид. ; U и в начальный период работы ди амического торможения привод замедляется
более интенсивно, чем при отсутствии нагрузки, тем самым откло кеийе пути сосуда от расчетного сводится к нулю. После этого ускорение привода вновь становится равным расчетному. Аналогично при подъеме груза {график на фиг.2 н 3-| сведение к нулю ошибки в отработке тормозного пути достигается тем, что на начальном этапе ди намического торможения привод замедляется менее интенсивно. Корректирующее звено 12 необходимо
для исключения возникновения в сие теме незатухающих колебаний. .
Предлагаемое устройство программирования скорости существенно повышает точность отработки заданного тормозного пути, тем самым создавая возможность повышения- проиэводите ьности подъемной машины. Поэтому устройство может быть эффективно использовано в схемах автоматического управления подъемными установками с асинхронным приводом в режиме динамического торможения
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ключев В.И | |||
| и Терехов В.М | |||
| Электропривод и автоматизация общепромышленных механизмов | |||
| М., Энергия, 1980, с | |||
| Ножевой прибор к валичной кардочесальной машине | 1923 |
|
SU256A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ключев В.И., Сандлер А.С., Чиликин М.Г | |||
| Теория автоматизированного электропривода | |||
| М., Энергия, 1979, с | |||
| ИНЕРЦИОННО-АККУМУЛЯТОРНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ ВЕРТИКАЛЬНОГО КЛИНОВОГО ЗАТВОРА ОРУДИЙ | 1912 |
|
SU510A1 |
