. V.
00 00
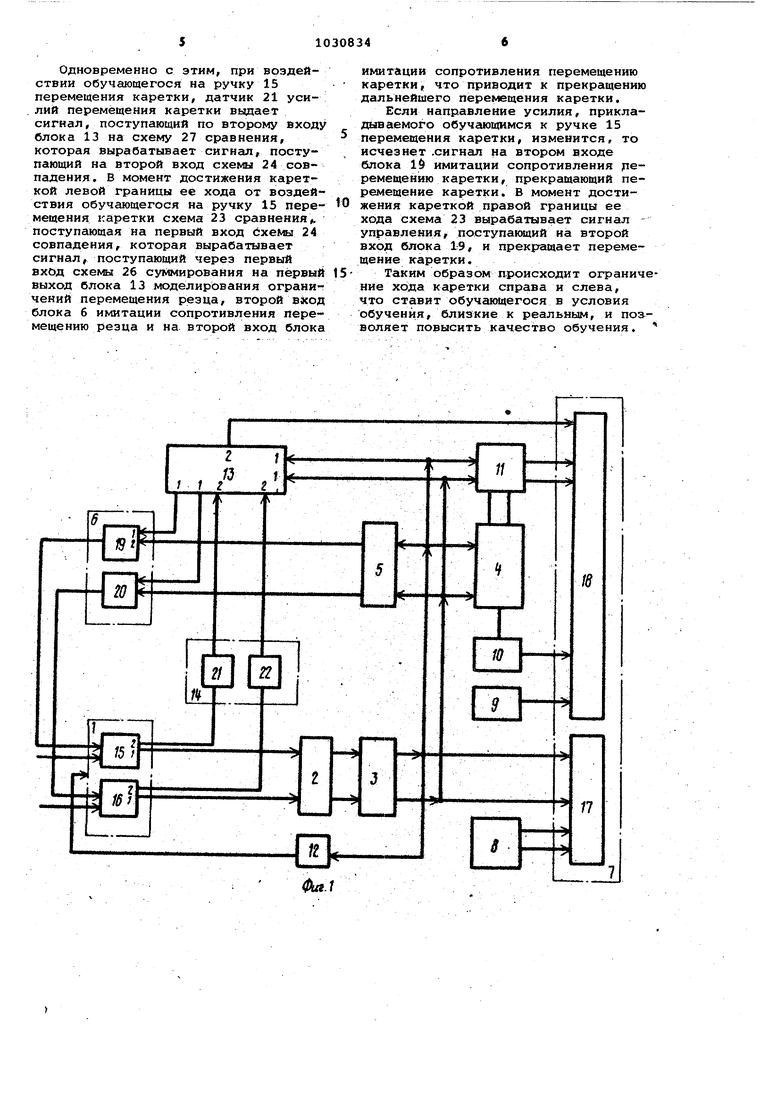
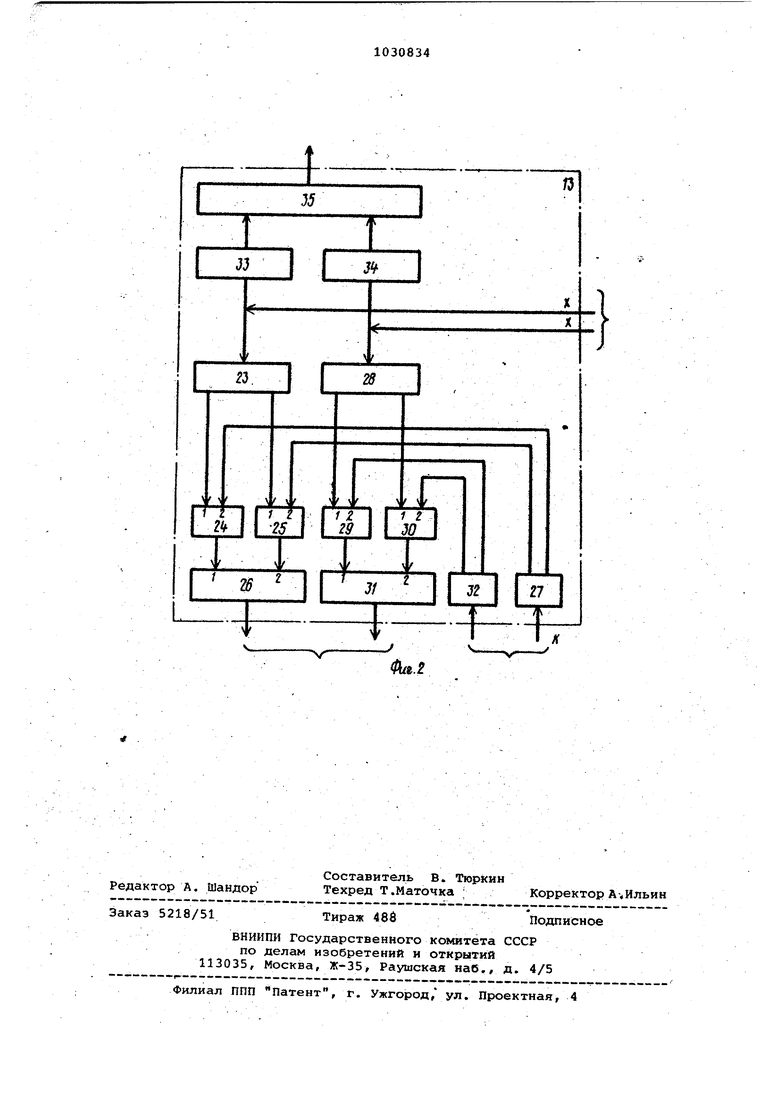
Изобретение относится к тренажер для обучения пользованием рабочим инструментом и может быть использовано для обучения навыкам управлени металлорежущим станком. По основному авт.св. № 911591 известен тренажер для формирования навыков управления металлорежущим станком, содержащий блок продольног и поперечного перемещений резца, блок индикации, блок преобразования и счетчик, он имеет блок датчиков перемещения резца, блок моделирования перемещения резца, задатчик профиля, блок имитации сопротивлени перемещению резца,блок моделирования скорости перемещения резца и датчик времени, при этом каждый из выходов блока продольного и поперечного пер мещений резца через блок задатчиков перемещения резца и блок моделирования перемещения резца соединен с соответствующими входами бЛока преобразования и блока моделирования скорости перемещения резца, выхода ,которого через блок имитации сопр тивления перемещению резца присоединены к входам блока продольного и поперечного перемещений резца, приче к первому и второму входу блока инди цин подключены входы блока моделирования перемещения резца, к третьему и четвертому - выходы задатчика профиля,, к пятому - выход датчика времени, а к шестому через счетчик подключен выход блока преобразования. Кроме того, он содержит блок определения ошибок, включающий арифметичес кие узлы, ключи и пороговой элемент, при этом выходы блока моделирования перемещения резца через соответствующие последовательно соединенные арифметические узлы и подключены к седьмому и восьмому i входам блока индикации, выходы арифметических узлов через пороговый элемент дополнительно подсоединены к входам соответствующих ключей, а к вторым входам арифметических узлов подсоединены второй и третий выходы блока преобразования f Недостатком устройства является то, что формирование навыков управления металлорежущим станком происходит при отсутствии перемещения органов, управления станка относитель но профиля заданной фигуры и самого обучающегося, а также при отсутствии ограничений ходов каретки и салазок относительно станины станка, что снижает качество обучения.. Целью изобретения является повышение качества обучения путем прибли жения условий обучения к реальным. Указанная цель достигается тем, что тренажер для формирования навыков управления металлорежущим станком содержит блок перемещения каретки, Олок 1«}делирования ограничений перемещения резца и блок датчиков усилий перемещения резца, причем вход блока перемещения каретки соединен с соответствукяцим выходом блока моделирования перемещения резцЁ ; а выход - с управляющим блока продольного и поперечного перемещений резца, при этом управляющие выходы блока продольного и поперечного, перемещений резца через блок датчиков усилий перемещения резца и блок моделирования ограйичеиий перемещения резца подсоединены к управляющим входам блока имитации сопротивления перемещению резца, управляющие входы блока моделирования ограничений перемещения резца соединены с соответствующими выходами блока моделирования перемещения резца, а его выход соединен с дополнительным входом блока индикации. На фнг. 1 изображена блок-схема тренажера; на фиг. 2 - пример использования блока моделирования ограничений перемещению резца. Тренажер содержит блок 1 продольного и поперечного перемещений резц шгрвые выходы которого через блок 2 датчиков перемещения резца и блок 3 моделирования перемещения резца соединены с соответствукядими входами блоков 4 преобразования и блока 5 моделирования скорости перемещения резца, выходы которого через первые входы блока 6 имитации сопротивления Шремещению резца присоединены к входг1М блока 1 продольного и поперечного т5ремещений резца,блок 7 индикации,к п&рвому ивторому входам которого подключены выходы блока 3 моделирования , перемещения резца, к третьему и четвертому входам - выходы задатчика 8 профиля, к пятому входу - выход датчика 9 времени, к шестому входу - выход счетчика 10, соединенного с первым выходом блока 4 преобразования, а также блок 11 определения ошибки, 1Г1ервый и второй входы которого соединены с соответствукедими выходами блока 3 моделирования перемещения резца, третий и четвертый входы соответственно с вторым и третьим. выходами блока 4 преобразования, а первый и второй выходы - соответственно с седьмым и восьмым входами блока 7 индикации, вход блока 12 перемещения каретки соединен с соответствуюйшм выходом блока 3 моделирования перемещения резца, а выход с блоком 1 продольного и поперечного перемещений резца, первые выходы блока 13 моделирования ограничений еремещения резца соединены с вторыи входами блока 6 имитации сопротивления перемещению резца, второй ызсод - с девятым входом блока 7 нидикации, первые входы ,- с соответствукмцими выходами блрка 3 моделирования перемещения резца а вторые входы - с соответствующими выходами б.ло ка 11 датчиков усилий перемещения резца, входы которого соединены с вторьош выходами блока 1 продольно яого и поперечного перемещений резца. Ручка 15 перемещения каретки и ручка 16 перемещения салазок входят в состав блока 1 продольного и поперечного перемещений резца. Входы блока 1 продольного и поперечного перемещений резца соединены с соответствующими выходами блока 6 имитации сопротивления перемещению рез.ца, первые выходы - с соотаетсвующими входами блока 2 датчиков перемещения резца, а вторые выходы с соответствующими входами блока 14 датчиков усилий перемещения резца, Блок 7 индикации предназначен для выдачи обучаемому информации о. профиле заданной , положения вершины резца относительно заданной фигуры, ошибках, допускаемых обучаемым, продолжительности выполнения обучаемым упражнения, а также выдачи обучаемому указаний по правильному управлению органами станка. Задатчик 8 профиля выдает в блок индикации сигналы, с помощью которых На экране электроннолучевой труб ки 17 формируются изображения профи.ля заданной фигуры, профиля патрона токарного станка и границы ходов каретки и салазок. Позицией -18 обозначено световое табло. Блок 19 имитации сопротивления перемещению каретки, изменяющий величину усилия, прикладываемого обу чающимся к ручке 15 перемещения каретки, и блок 20 имитации сопротивления перемещению салазок, изменяю«аий величину усилия, прикладываемого обучающимся к ручке 16. перемещения салазок, входят в состав блока 6 имитации сопротивления перемещению резца. Первые входы блока 19 имитации сопротивления перемещению каретки и блока 20 имитации сопротивления перемещению салазок соединены с соот ветствующими выходами блока 5, модели рования скоростн перемещения резца, а втсфые входы - с первыми выходами блока 13 моделирования ограничений перемещения резца. Датчик 21 УСИЛИЙ перемещения каретки и датчик 22 усилий перемещения салазок, входящие в состав блока 14 датчиков усилий перемещения резца измеряют усилия, прикладываекие обучающимся к соответственно ручке 15 перемещения каретки и ручке 16 пере мещения салазок. На фиг. 2 приведен пример исполнения блока 13 моделирования ограни чений перемещения резца, который содержит схему 23 сравнения, вход которой соединён с одним их выходов блока 3 моделирования перемещения резца, а два выхода - с первыю входами схем 24 и 25 совпадения, выходы которых соединены с входами cxeivoj 26 суммирования, а вторые входы - с соответствукшшми выходами схемы 27 сравнения и схемы 28 сравнения 28 f вход которой соединен с другим выходом блсжа 3 моделирования перемещения резца, а два выхода с первыми входами схем 29 и 30 сов- . падения соответственно, выходы . которых соединены со схемой 31 дения, а вторые входы схем 29 и 30 - с соответствующими выходами схемы ; 32 сравнения. Тренажер также содержит схемы 33 ; и 34 сравнения, входы которых соеди иены с соответствующими выходами ; блока .3 моделирования перемев ения резца, а выходам - с соответствующими входами схемы 35 совпадения. i Схема 23 сравнения сравнивает текущее значение абсциссы вершины резца Xft, поступающее на ее вход по первому входу блока 13 моделирования ограничений перемещения резца с одного из выходов блока 3 моделирования перемещения резца со значениями каждой из двух границ хода каретки - левой Хд и правой Яр .. Г -. --; . . . Схема 28 сравнения сравнивает текущее значение ординаты резца VQ, поступающее на ее вход по первому входу блока 13 моделирования ограничений перемещения резца с другого выхода блока 3 моделирования перемещения резца, со значениями каждого HS двух границ хода салазок - даль,ней д и ближней V и . Тренажер работает следующим образом. При включенном тренажере на экране электроннолучевой трубки 17, входящей в состав блока 7 индикации формируются изображения профиля фигуры заданной , профиля патрона станка, границы ходов каретки : и салазок, а также светлого пятна, ; положение которого соответствует положению веЕниины резца от11осительнО профиля фигуры. При воздействии обучакедегося на . ручку перемещения каретки 15 напряжение на первом выходе блока 2 датчиков перемещения резца изменяется пропорционально углу поворота ручки 15, а затем поступает на вход блока 12 перемещения каретки. Под действием напряжения блок 12 перемещает относительно профиля заданной фигуры и самого обучающегося органы управления станка - ручку 15 и 16 .
Одновременно с этим, при воздействии обучающегося на ручку 15 перемещения каретки, датчик 21 усилий перемещения каретки видает сигнал, поступающий по второму входу блока 13 на схему 27 сравнения, которая вырабатывает сигнал, поступающий на второй вход схемы 24 совпгшения. В момент достижения кареткой левой границы её хода от воздействия обучающегося на ручку 15 перемещения каретки схема 23 сравнения,, поступающая на первый вход cxetm 24 совпадения, которая вырабатывает сигнал, поступающий через первый вход схемы 26 суммирования на первый выход блока 13 моделирования ограничений перемещения резца, второй вход блока б имитации сопротивления перемещению резца и на второй вход блока
имитации сопротивления перемещению каретки, что приводит к прекращению дальнейшего перемещения каретки.
Если направление усилия, прикладагааемого обучающимся к ручке 15 перемицения каретки, изменится, то исчезнет .сигнал на втором входе блока 1& имитации сопротивления церемещению каретки, прекращающий перемещение каретки. В момент достижения кареткой правой границы ее хода схема 23 вырабатывает сигнал управления, поступакиций на второй вход блока 19, и прекращает перемещение каретки.
Таким образом происходит ограничние хода каретки справа и слева, что ставит обучающегося в условия обучения, к реальным, и позволяет повысить качество обучения. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для формирования навыков управления металлорежущим станком | 1980 |
|
SU911591A2 |
| Устройство для обучения работе на металлорежущих станках | 1981 |
|
SU982068A1 |
| Устройство для обучения работе на металлорежущих станках | 1982 |
|
SU1051558A1 |
| Тренажер токаря | 1986 |
|
SU1368908A1 |
| Тренажер водителя транспортно-гО СРЕдСТВА | 1979 |
|
SU798957A1 |
| Тренажер буровика | 1982 |
|
SU1062760A1 |
| Тренажер водителя транспортного средства | 1980 |
|
SU909674A2 |
| Тренажер буровика | 1984 |
|
SU1213495A1 |
| Тренажер машиниста одноковшового экскаватора | 1985 |
|
SU1260998A1 |
| Тренажер водителя транспортного средства | 1986 |
|
SU1328837A1 |
ТРЕНАЖЕР ДЛЯ ФОРМИРОВАНИЯ НАВЫКОВ УП РАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМ СТАНКС 1 по авт.св. 911591, о т л ич а ю щ и и с я тем, что, с целью повьииения качества обучения путем приближения условий рбучения к реальным, он содержит блок перемещения каретки, блок моделирования ограничений перемещения резца и блок датчиков усилий перемещения резца причем вход блока перемещения каретки соединен с соответствующим выходом блока моделирования перемещения резца, а выход - с управляюьдам входом блока продольного и поперечного перемещений резца,-при этом управляющие выходы блока продольногр и поперечного перемещений резца блок датчиков усилий перемещения резца и блок моде;7ирова11ия ограничений перемещения резца подсоединены к управля-. ющим входам блока имитации сопротивления перемещения резца, управляющие входы блока моделирования ограничений перемещения резда соединены с соответствующими выходами блока моде (О рованйя перемещения резца, а его выход соединен с дополнительным входом блока индикации.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тренажер для формирования навыков управления металлорежущим станком | 1980 |
|
SU911591A2 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
