454) УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ РАБОТЕ НА МЕТАЛЛОРЕЖУЩИХ СТАНКАХ
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для формирования навыков управления металлорежущим станком | 1980 |
|
SU911591A2 |
| Тренажер токаря | 1986 |
|
SU1368908A1 |
| Устройство для обучения работе на металлорежущих станках | 1982 |
|
SU1051558A1 |
| Тренажер для формирования навыков управления металлорежущим станком | 1981 |
|
SU1030834A2 |
| Тренажер сварщика | 1989 |
|
SU1663619A1 |
| Тренажер сварщика | 1988 |
|
SU1594588A1 |
| Тренажер сварщика | 1988 |
|
SU1550571A1 |
| Устройство для бескопирной обработки профильных валов с равноосным контуром | 1978 |
|
SU743793A1 |
| Тренажер сварщика | 1985 |
|
SU1302313A1 |
| Тренажер сварщика | 1986 |
|
SU1330649A1 |
Изобретение относится к трена жерам для обучения пользования рабочим инструментом и может быть использовано для обучения навыкам управления металлорежущим станком.
Известно устройство, предназначенное для обучения работе на металлорежущих станках и содержащее объект обучения, органы управления, блоки оценки действий и индикации IJ
Недостатком данного устройства является то, что при обучении у учащихся возникает психологическое напряжение, которое снижает активность их работы, что значительно уменьшает эффективность обучения.
Известно также устройство, предназначенное для аналогичных целей и содержащее блоки моделирования, управления, индикации, оценки 2.
Недостатком указанного устройства является отсутствие информации о характере и величине ошибки, допускаемой об5гчагощимся, что снижает наглядность обучения.
Наиболее близким к изобретению является устройство, содержащее блок продольного и поперечного перемещения резца, каждый выход которого через блок датчиков перемещения резца
и блок моделирования перемещения резца соединен с соответствующими входами блока преобразования и блока моделирования скорости перемещения резца, выходы которого через блок имитации сопротивления перемещения резца присоединены к входам блока продольного и поперечного перемещения резца, блок индикации, к первому и
10 второму входу которого подключены выходы блока моделирования перемещения резца, к третьему и четвертомувыходы задатчика пРоОиля, к пятомувыход датчика времени, к шестому 15выход счетчика, соединенного с первым выходом блока преобразования, а также блок определения ошибки ,первый и второй входы которого соеденены с соответствующими выходами блока
20 моделирования перемещения резца,тре-: тий и четвертый входы - с вторым и третьим шлходом блока преобразования соответственно, а первый и второй
выходы - с седьмым и входа25 tm блока индикации соответственно t3j
Недостатком данного устройства являются его мгише дидактические возможности , так как обучающийся не может корректировать свои управляющие
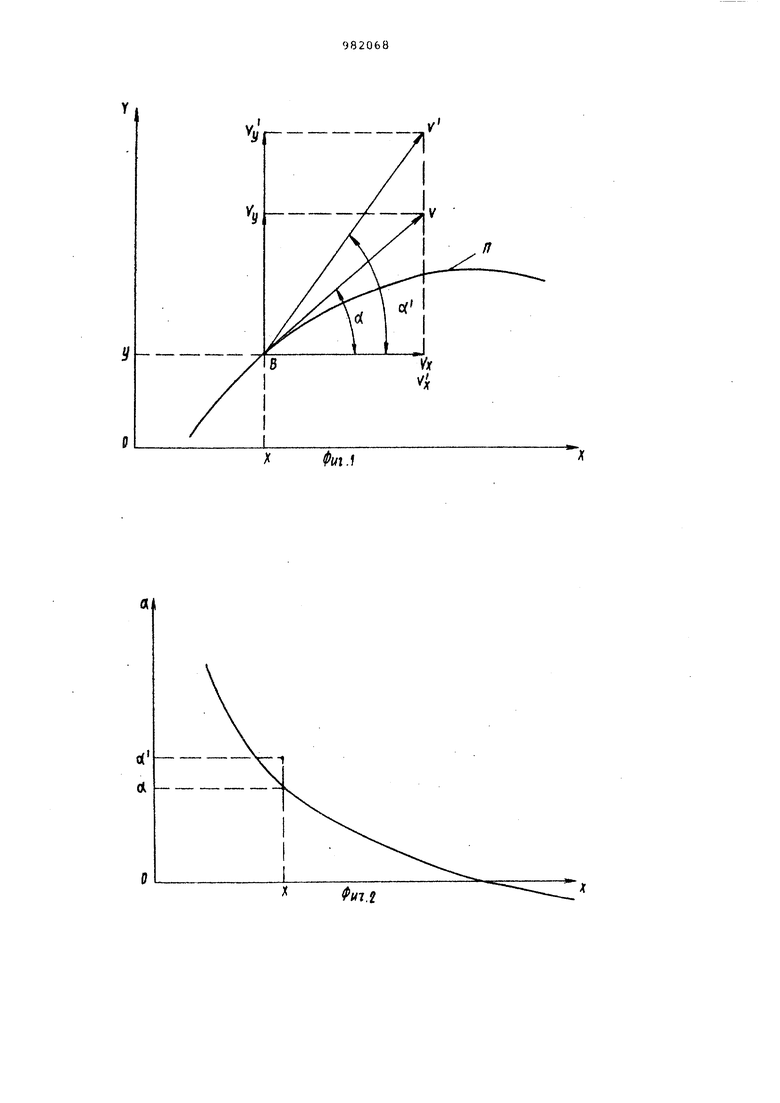
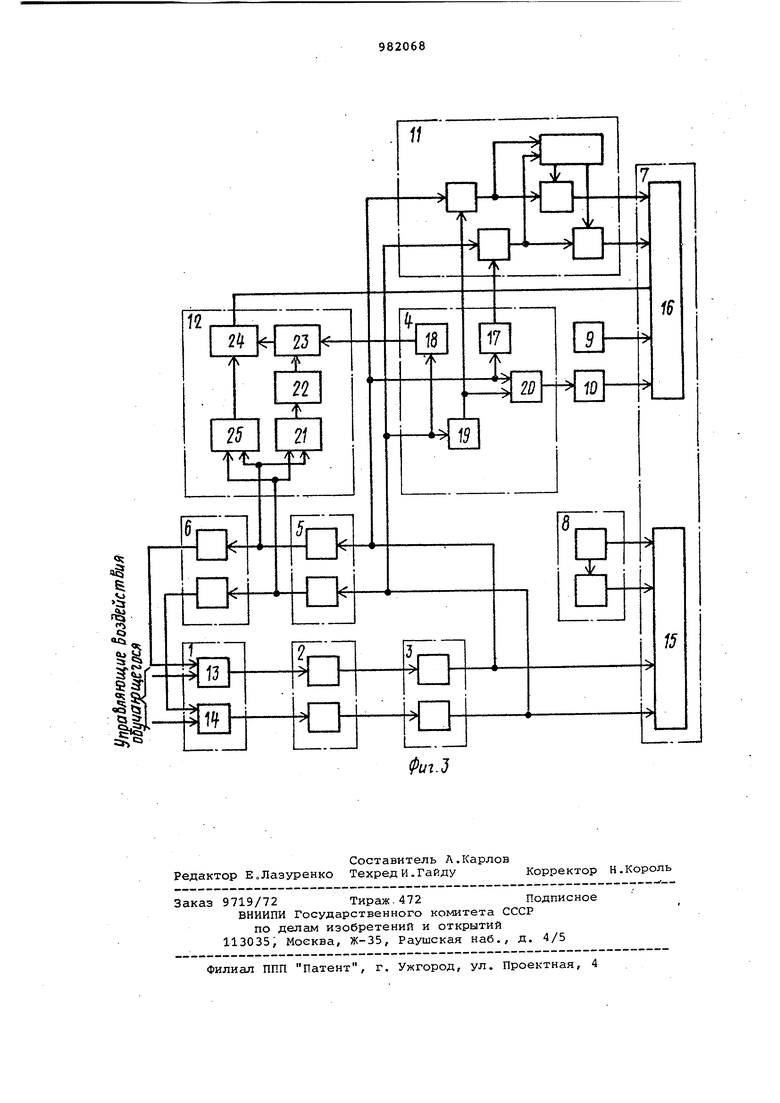
30 воздействия из-за отсутствия текущей информации о их правильности, чт ведет к нарушению одного из основных принципов дидактики - принципа созна тельности и активности. Так, неправильное воздействие обучающегося на ручку перемещения каретки или ручку перемещения.салазок выявляется тольк по факту нарушения точности управления, индицируемого блоком индикации В момент же воздействия обучающегося На органыУправления станка информаци |о правильности этих воздействий отсутствует, поэтому обучающийся не может правильно соизмерить свои управляющие воздействия, его действия неуверенны,.напряженны,ЧТО снижает сознательность и активность его работы. Цель изобретения - расширение дидактических возможностей устройства. Поставленная цель достигается тем что в устройство для обучения работе на металлорежущихстанках, содержащее последовательно включенные блок координатных перемещений рабочего органа, блок датчиков перемещения, блок моделирования перемещения, рабочего органа, блок моделирования скорости перемещения и блок имитации внешних воздействий, выход которого соединен с первым входом блока координатных перемещений рабочего органа, второй вход которого является входом управляющих воздействий устройства, последовательно соединенные первый функциональный преобразователь , блок определения ошибок и блок индикации, второй и третий входы которого непосредственно подключены к выходам датчика времени и задатчика перемещений соответственно, а четвертый выход - через счетчик к второму выходу первого функционально го преобразователя, выход блока моде лирования перемещений рабочего органа соединен с пятым входом блока индикации, входом первого функционального преобразователя и вторым входом блока определения ошибок, введен формирователь сигналов консультативной информации, первый вход которого, соединен с выходом блока моделирования скорости перемещения, второй вход - с третьим выходом первого функционального преобразователя , а выход - с шестым входом блока индикации. При этом формирователь сигналов консультативной информации содержит компаратор и последовательно соединенные делитель напряжения, второй функциональный преобразователь, увел сравнения и ключ, выход которого является выходом формирователя, а второй вход ключа подсоединен к выходу компаратора, входы компаратора и делителя напряжения являются первым входом формирователя, второй вход узла, сравнения является вторым входом формирователя. На фиг. 1 в прямоугольной системе координат XOY изображена векторная диаграмма скоростей резца при положении его вершины в точке В профиля заданной фигуры, где XOY. - прямоугольная система координат; П - профиль заданной фигуры; В - положение вершины резца, .х, у - мгновенные значения соответственно абсциссы и ординаты вершины резца.; УХ V,y - расчетньГе мгновенные скорости перемещения соответственно каретки и салазок; Vx - действительная мгновенная скорость перемещения каретки,-, V - расчетная мгновенная скорость перемещения резца; Vy - действительная мгновенная скорость перемещения салазок; f- действительная мгновемная скорость перемещения , oi - углы наклона к оси абсцисс соответственно расчетной и-действительной мгновенных скоростей перемещения резца; на фиг. 2 - изменение вдоль профиля заданной фигуры угла наклона к оси абсцисс мгновенной скорости перемещения резца; на фиг. 3структурная схема устройства. -Устройство содержит блок 1 координатных перемещений рабочего органа, блок 2 датчиков перемещения, блок 3 моделирования перемещения рабочего органа, функциональный преобразователь 4, блок 5 моделирования скорости перемещения, блок б имитации внетних воздействий, блок 7 индикации, задатчик 8 формы перемещений,, датчик 9 времени, счетчик 10, блок. 11 определения ошибок, формирователь 12 сигналов консультативной информации. Ручка 13 перемещения каретки и руЧка 14 перемещения салазок входят в состав блока 1. Блок 7 предназначен для выдачи обучаемому информации о профиле заданной фигуры, положения вершины резца относительно профиля заданной фигуры, ошибках, допускаемых обучаемым, продолжительности выполнения обучаемым упражнения, а также выдачи обучаемому указаний по правильному управления органами станка. Блок 7 может быть представлен двухлучевой электронной трубкой 15 и световым табло 16, в качестве которых могут быть приняты соответствующие элементы устройства, описанного в прототипе. Преобразователь 4 сигналам, поступающим на его входы с блока 3, вырабатывает сигнал нарушения точности управления и для каждого текущего значения абсциссы вершины резца определяет угол наклона к оси абсцисс расчетной мгновенной скорости перемещения резца
С первого выхода преобразователя 4 сигнал нарушения точности управления поступает на счетчик Ю, с второго и третьего выходов преобразователя 4 сигналы, пропорциональные расчетным значениям координат 5 вершины резца, поступают на третий и четвертый входы блока 11 соответственно, а с четвертого выхода преобразователя 4 сигнал, пропорциональный углу наклона к оси абсцисс рис- Ю четной мгновенной скорости перемещения резца, поступает на третий вход формирователя 12.
Преобразователь 4 состоит из функциональных преобразователей 17 и 18 15 и последовательно соединенных между собой функционального преобразователя 19 и узла 20 сравнения. Назначение функциональных преобразователей 17 .и 19 и узла 20 сравнения аналогично 20 iсоответствующим устройствам, исполь|3уемым в прототипе. Функциональный преобразователь 18 по сигналам, поступающим на его вход с выхода блока
3,определяет для каждого текущего 25 значения абсциссы вершины резца угол наклона к оси абсцисс расчетной мгновенной скорости перемещения резца (фиг. 2), В качестве функционального п{эеобразователя 18 может быть принят функциональный преобразователь, используемый в прототипе.
Формирователь 12 состоит из делителя 21 напряжения, первый и второй входы которого соединены с соответствующими выходами блока 5, а выход - с входом функционального преобразователя 22, выход которого соединен с первым входом узла 23 сравнения, второй вход которого соединен с четвертым выходом преобразователя 40
4,а выход - с первым входом ключа 24, выход которого соединен с девятым входом блока 7 индикации, а второй вход - с выходом компаратора 25, два входа которого соединены с соот- 45 ветствующими выходами блока 5 моделирования скорости перемещения резца.
Делитель 21 по сигналам, поступающим на его входы с соответствующих выходов блока 5 и пропорциональным 50 действительным скоростям перемещения соответственно каретки Vj и салазок V , для каждого текущего значения абсциссы вершины резца определяют тангенс угла наклона к оси абс- 55 цисс действительной мгновенной скорости перемещения резца.
Функциональный преобразователь 22 по сигналу, поступающему на его вход с делителя 21 и пропорциональному тангенсу угла наклона к оси абсцисс действительной мгновенной скорости перемещения резца, onpeAtляет угол наклона к оси абсцисс действительной мгновенной скорости перемещения резца.
Узел 23 сравнения предназначен для сравнения сигнала, поступпглцего на его первый вход с функционального преобразователя 22 и пропорционального углу наклона к оси абсцисс расчетной мгновенной скорости перемещения резца, с сигналом, поступающим на его второй вход с функционального преобразователя 18, входящего в состав преобразователя 4 и пропорциональным углу наклона к оси абсцис действительной мгновенной скорости перемещения резца. В случае неравенства угла наклона к оси абсцисс расчетной мгновенной скорости перемещения резца углу наклона к оси абсцисс действительной мгновенной скорости перемещения резца узел 23 выдает сигнгш рассогласования на первый вход ключа 24.
Компаратор 25 по игналам, поступающим на его входы с соответствующи выходов блока 5 и пропорциональным действительным скоростям перемещения каретки V и салазок Vj соответственно, выявляет наибольшую из этих скоростей.
Ключ 24 по сигналс1м, поступающим на его первый вход с выхода узла 23, на второй вход - с выхода компаратора 25, вырабатывает на своем выходе сигнал, несущий в себе информацию о необходимости корректировки обучающимся своих управляющих воздействий.
Устройство работает следующим образом.
При включенном питании на экране трубки 15, входящейв состав блока 7, формируется изображение профиля плоской фигуры, заданной формы и светлого пятна, положение которого соответствует положению вершины резца относительно профиля фигуры. Формирование изображения профиля заданной фигуры и светлого пятна в предлагаемом устройстве происходит аналогично формированию этих изображений в устройстве, принятому в качестве прототипа.
Располагают в прямоугольной системе координат XOY (фиг. 1 ) профиль заданной фигуры и вершину резца так, чтобы перемещение каретки соответствовало перемещению вершины резца вдоль оси X, а перемещение салазок - перемещению вершины резца вдоль оси Y.
При воздействии обучающегося иа ручку 13 и ручку 14 напряжения на выходах блока 2 изменяются пропорционально углу поворота ручки 13 перемещения каретки и углу поворота ручки 14 перемещения салазок соответственно. Напряжения с блока 2 пос тупают на входы блока 3, где преобразуются в напряжения, величина которых пропо зцнональна величине перемещения каретки и величине перемещения салазок соответственно, а стгшо быть текущим значением абсциссы и ор динаты вершины резца. Преобразователь 4 сигналы перемещения резца преобразует в сигналы с нарушением точности управления, которые передает через счетчик 10 и блок 11 на табло 16, входящее в состав блока 7 Пусть в рассматриваемый момент времени вершина резца находится в точке В профиля заданной фигуры (фиг. 1). Этой точке вершины резца соответствует определенный угол наклона k оси абсцисс расчетной мгновенной скорости перемещения резца ot Так как расчетная мгновенная скорост перемещения резца oi является геомет рической суммой расчетных скоростей перемещения каретки V и поэтому углу наклона к оси абсцисс расчетной мгновенной скорости перемещения резца об соответствует определенное соотношение между расчетными мгновенными скоростями перемещения каретки Vj( и салазок My ., Пусть также в рассматриваекый 1момент времени от управляющих воз1действий обучающегося на органы станка действительная мгновенная ,скорость перемещения кареткиV равна расчетному значению этой скорости Vx , а дейст:вительная мгновенна скорость перемещения салазок v, бол ше расчетного значения этой скорости Vj, ; отсюда действительная мгновенная скорость перемещения резца V больше расчетного значения этой скорости V, и поэтому угол наклона к оси абсцисс действительной мгновенной ,,.скорости перемещения резца .о1 боль: ше угла наклона к оси абсцисс расчетной мгновенной скорости перемещения резца ot . I . Продолжение выполнения упражнени при данных управляющих воздействиях обучающегося на органы станка приводит к отклонению вверх по ординате вершины резца от профиля заданной фи гуры, т.е. к нарушению точности выполнения управления, так как угол наклона к оси абсцисс, действительной мгновенной скорости перемещения резц больше угла наклона к оси абсцисс рас четной мгновенной скорости перемещения резца. Для устранения неправильных управ ляющих воздействий обучающегося на органы станка, т.е. для предотвращения нарушения точности управления обучающемуся выдается указанная на уменьшение скорости перемещения салазок . Выдача обучающемуся указаний, сигнализирующих о его неправильных в данный момент времени управляюидих воздействиях и показывающих пути их исправления, является одним из основных методических требований, предъявляемых к тренажеру. Функциональный преобразователь 18 по сигналам, поступающим на его вход с выхода блока 3 для мгновенного значения абсциссы вершин резца х определяет угол наклона к оси абсцисс расчетной мгновенной скорости перемещения резца pi . Делитель 21 по сигналам, поступающим на его входы с соответствующих выходов блока 5 и пропорциональным действительным скоростям перемещения соответственно каретки х и салазок V , для мгновенного значения абсциссы вершины резца X определяет тангенс угла наклона к оси абсцисс действительной мгновенной скорости перемещения резца. Функциональный преобразователь 22 по сигналу, поступающему на его вход с делителя 21 и пропорционального тангенсу угла наклона к оси абсцисс действительной мгновенной скорости перемещения резца, определяет угол наклона к оси абсцисс действительной мгновенной скорости перемещения резца ct . Узел 23 сравнения сигнал, по-, ступающий на его первый вход с функционального преобразователя 22 и пропорциональный углу наклона к оси абсцисс действительной мгновенной скоЬюсти перемещения резца, сравнивае т с сигналом, поступающим на его вто;рой вход с функционального преобразрвателя 18 и пропорциональным углу наклона к оси абсцисс расчетной мгновенной скорости перемещения резца. Так как в рассматриваемом примере угол наклона к оси абсц-исс действительной скорости перемещения резца больше угла наклона к оси абсцисс расчетной Мгновенной скорости перемещения резца, то узел 23 сравнения выдает сигнал этого рассогласования на первый вход ключа 24. Одновременно с этим компаратор 25 по сиг-налам, поступающим на его входы с соответствующих выходов блока 5 про порциональным действительным значениям скоростей перемещения каретки х и салазок v((, соответственно , выявляет наибольшую из этих двух скоростей - действительную скорость перемещения салазок v ив соответствии с этим вьщает сигнал на второй вход ключа 24. Ключ 24 по сигналам, поступающим на его первый вход с выхода узла 23 сравнения и на второй вход с выхода компаратора 25, вырабатывает на своем выходе сигнал, несущий в себе информацию.о необходимости уменьшения обучающимся скорости перемещения салазок. Этот сигнсШ с выхода ключа 24 поступает на вход табло 16, в результате чего на нем индицируется указание о необходимости уменьшения обучающимся скорости перемещения салазок. Следуя этим указаниям, обучающий ся уменьшает скорость перемещения салазок до исчезновения этого указа ния на табло 16. В момент равенства действительной скорости перемещения салазок ее расчетному значению угол наклона к оси абсцисс действительной мгновенной скорости перемещения резца равен углу наклона к оси абсцис расчетной мгновенной скорости перемещения разца ci . Это равенство при водит к исчезновении сигнала на выходе узла 23 сравнения, вследствии чего закрывается ключ 24 и исчезает индицируемое табло 16 указание подсказка по управлению органами станка. Таким образом, своевременное ука зание обучающемуся о его неправильных в данный момент времени управляющих воздействиях и о пути их исправления позволяет обучающемуся правильно соизмерить свои воздействия по управлению станком и тем самым избежать нарушения точности управления станком. Аналогично работает устройство при превышении скорости перемещения каретки ее расчетного значения. Использование предлагаемого тренажера позволяет приобрести навыки управления металлорежущим станком значительно быстрее и более высоког качества. Формула изобретения 1. Устройство для обучения работ на металлорежущих станках, содержащее последовательно включенные блок координатных перемещений рабочего о гана, блок датчиков перемещения, блок моделирования перемещения рабо .чего органа, блок моделирования скорости перемещения и блок имитации внешних воздействий, вы. ход которого соединен с первым вхо дом блока координатных перемещений рабочего органа, второй вход которо является входом управлякяцих воздейс ВИЙ устройства, последовательно соединенные первый функциональный преобразователь, блок определения ошибок и блок индикации, второй и третий входы которого непосредственно подключены к выходам датчика времени и задатчика формы перемещений соответственно, а четвертый выход - через счетчик к второму выходу первого функционального преобразователя, выход блока моделирования перемещений рабочего органа соединен с пятым входом блока индикгщии, входом первого функционального преобразователя и вторым входом блока определения ошибок, О личающееся тем, что, с целью расширения дидактических возможностей устройства, оно содержит формирователь сигналов консультативной информации, первый вход которого соединен с выходом блока моделирования скорости перемещения, второй вход - с третьим выходом первого функционального преобразователя, а выход - с шестым входом блока индикации . 2. Устройство по п. 1, отличающееся тем, что в нем формирователь сигналов консультативной информации содержит компаратор и последовательно соединенные делитель напряжения, второй функциональный преобразователь, узел сравнения и ключ, выход которого является выходом формирователя, а второй вход ключа подсоединен к выходу компаратора, входы компаратора и делителя напряжения являются первым входом формирователя, второй вход узла сравнения является вторым входом формирователя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке 28,04796/28-12, кл. G 09 В 19/24, 1979. 2.Авторское свидетельство СССР по заявке № 2806085/28-12, кл. G 09 В 19/24, 1979. 3.Авторское свидетельство СССР по заявке 2952533/28-12, кл. G 09 В 19/24, 1980 (прототип).
