2.Подъемник по п. 1, отличающийся тем, что он снабжен установленными на вертикальных мачтах упорами, взаимодействующими с подвижными Г-образными стяжками.
3.Подъемник по п. 1, отличающийся тем, что он снабжен механизмами фиксации упомянутых стяжек, каждый из .которых включает в себя П-образную скобу, жестко укрепленную на плечах этих стяжек, и жестко связанный с вертикальной мачтой корпус, в котором смонтирован с возможностью
перемещения по прорези, выполненной в стенке корпуса, подпружиненный ролик, причем эта прорезь расположена под углом к нормали к траектории движения П-образных скоб механизма (риксации стяжек при их взаимодействии с вышеупомянутым роликом, причем угол наклона указанной про4)ези находится в пределах больще 0° и меньше 90°-f, где угол между прямой, соединяющей ось стопора и подпружиненного ролика, и нормалью к траектории движения вышеуказанной скобы при их взаимодействии.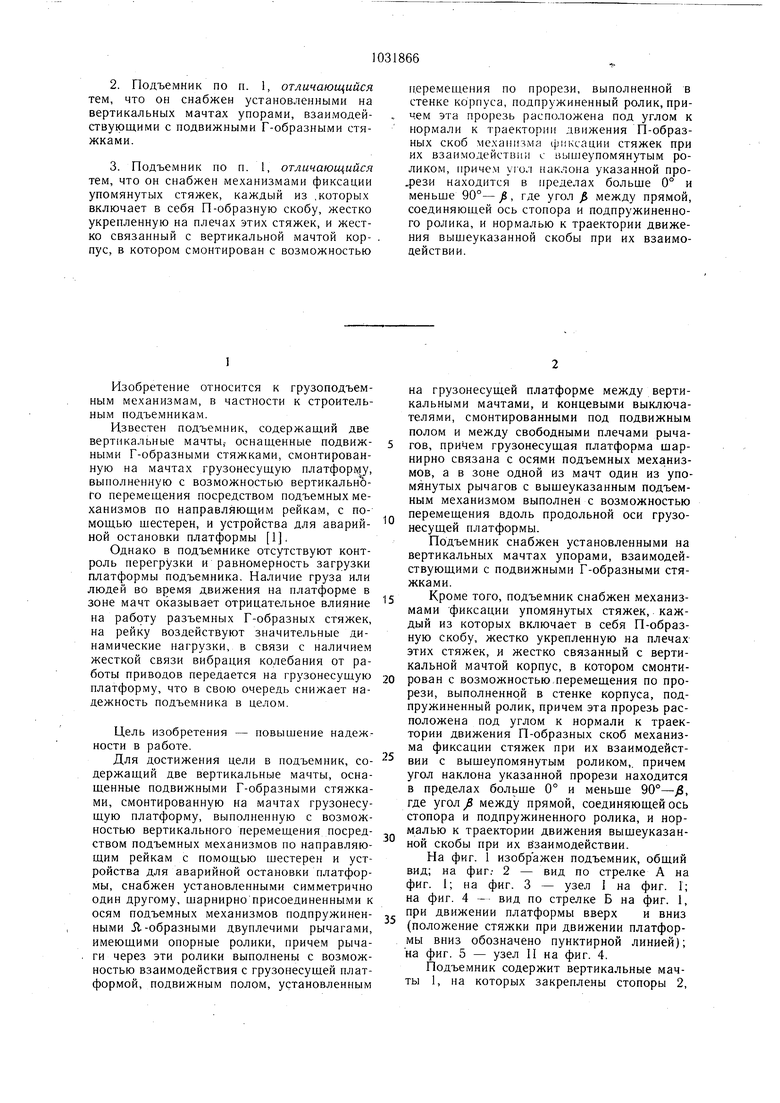

| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1989 |
|
SU1744061A1 |
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| Подъемник | 1988 |
|
SU1586994A1 |
| Конвейерный подъемник | 1987 |
|
SU1512903A1 |
| ОГРАНИЧИТЕЛЬ ВЫСОТЫ ПОДЪЕМАГРУЗОМЕСУЩЕГО ОРГАНА МАЧТОВОГОЗУБЧАТО-РЕЕЧНОГО ПОДЪЕМНИКА | 1972 |
|
SU432076A1 |
| Телескопическая мачта подъемника | 1987 |
|
SU1530556A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Устройство для фиксации грузовой каретки строительного подъемника | 1989 |
|
SU1676986A1 |
| Механизм стопорения грузовой каретки строительного подъемника | 1987 |
|
SU1474063A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
1. ПОДЪЕМНИК, содержащий две вертикальные мачты, оснащенные подвижными Г-образными стяжками, смонтированную на мачтах грузбнесущую платформу, выполненную с возможностью вертикального перемещения посредством подъемных механизмов по направляющим рейкам с помощью шестерен, и устройства для аварийной остановки платформы, отличающийся U тем, что, с целью повышения надежности в работе, он снабжен установленными симметрично один другому, шарнирно присоединенными к осям подъемных механизмов подпружиненными Я-образными двуплечими рычагами, имеющими опорные ролики, причем рычаги через эти ролики выполнены с возможностью взаимодействия с грузоиссущей платформой, подвижным полом, установленным на грузонесущей платформе между вертикальными мачтами, и концевыми выключателями, смонтированными пол подвижным полом и между свободными плечами рычагов, причем грузонесущая платформа шарнирно связана с осями подъемных механизмов, а в зоне одной из мачт один из упомянутых рычагов с вЫщеуказанным подъемным механизмом выпол- е S нен с возможностью перемещения вдоль продольной оси грузонесущей платформы. (Л о со ОС 05 О)
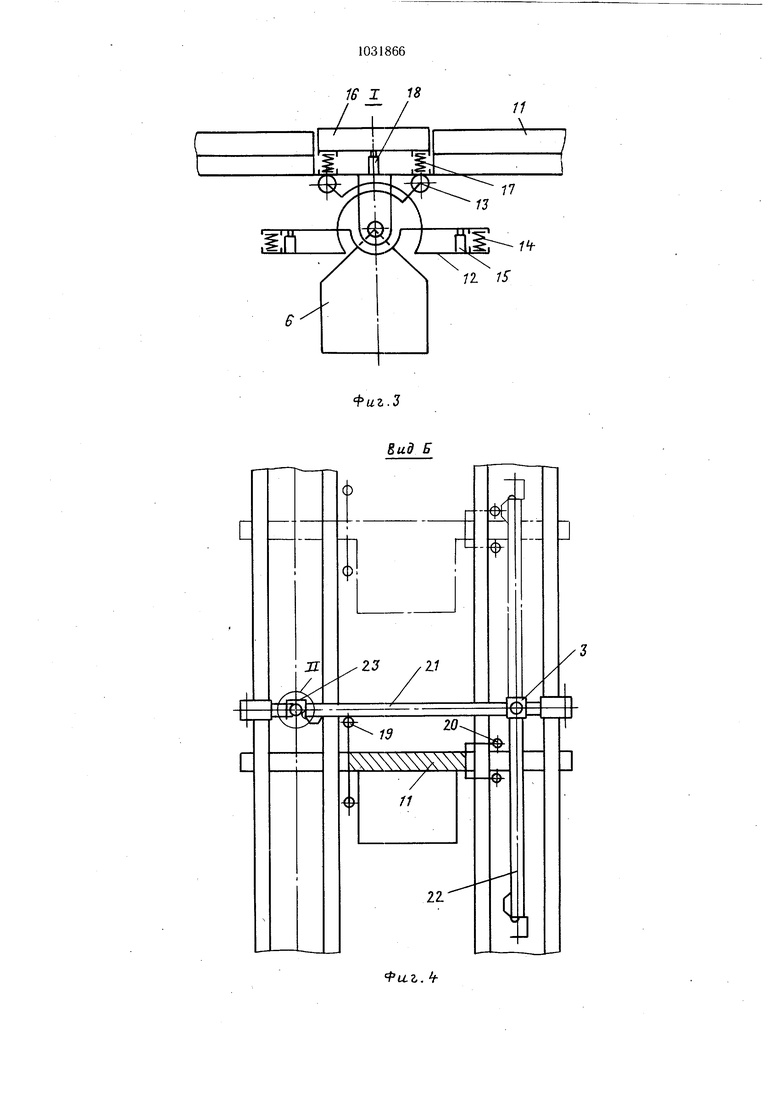
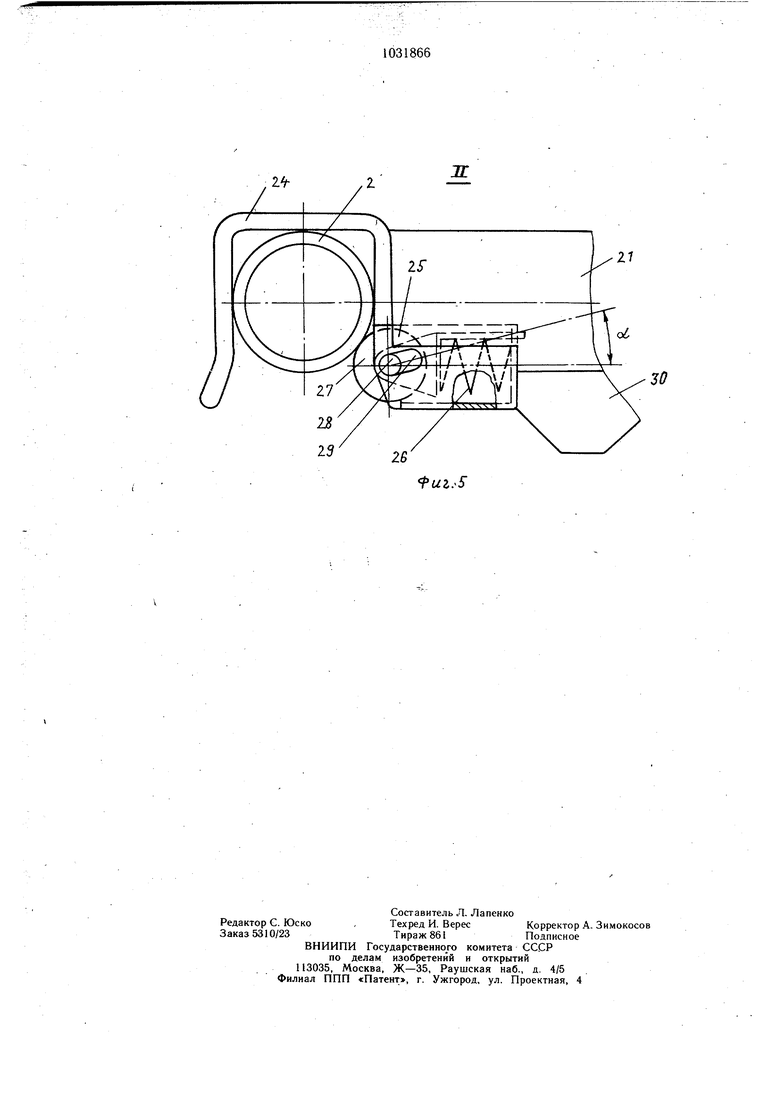
Изобретение относится к грузоподъемным механизмам, в частности к строительным подъемникам. Известен подъемник, содержащий две вертикальные мачты,- оснащенные подвижными Г-образными стяжками, смонтированную на мачтах грузонесущую платфор1У1у, выполненную с возможностью вертикального перемещения посредством подъемных механизмов по направляющим рейкам, с помощью шестерен, и устройства для аварийной остановки платформы 1. Однако в подъемнике отсутствуют контроль перегрузки и равномерность загрузки платформы подъемника. Наличие груза или людей во время движения на платформе в зоне мачт оказывает отрицательное влияние на работу разъемных Г-образных стяжек, на рейку воздействуют значительные динамические нагрузки, в связи с наличием жесткой связи вибрация колебания от работы приводов передается на грузонесущую платформу, что в свою очередь снижает надежность подъемника в целом. Цель изобретения - повышение надежности в работе. Для достижения цели в подъемник, содержащий две вертикальные мачты, оснащенные подвижными Г-образными стяжками, смонтированную на мачтах грузонесущую платформу, выполненную с возможностью вертикального перемещения посредством подъемных механизмов по направляющим рейкам с помощью шестерен и устройства для аварийной остановки платформы, снабжен установленными симметрично один другому, шарнирно присоединенными к осям подъемных механизмов подпружиненными Л-образными двуплечими рычагами, имеющими опорные ролики, причем рыча. ги через эти ролики выполнены с возможностью взаимодействия с грузонесущей платформой, подвижным полом, установленным на грузонесущей платформе между вертикальными мачтами, и концевыми выключателями, смонтированными под подвижным полом и между свободными плечами рычагов, причем грузонесущая платформа щарнирно связана с осями подъемных механизмов, а в зоне одной из мачт один из упомянутых рычагов с вышеуказанным подъемным механизмом выполнен с возможностью перемещения вдоль продольной оси грузонесущей платформы. Подъемник снабжен установленными на вертикальных мачтах упорами, взаимодействующими с подвижными Г-образными стяжками. Кроме того, подъемник снабжен механизмами фиксации упомянутых стяжек, каждый из которых включает в себя П-образную скобу, жестко укрепленную на плечах этих стяжек, и жестко связанный с вертикальной мачтой корпус, в котором смонтирован с возможностью перемещения по прорези, выполненно.й в стенке корпуса, подпружиненный ролик, причем эта прорезь расположена под углом к нормали к траектории движения П-образных скоб механизма фиксации стяжек при их взаимодействии с вышеупомянутым роликом,, причем угол наклона указанной прорези находится в пределах больше 0° и меньше 90°-Д, где угол уЗ между прямой, соединяющей ось стопора и подпружиненного ролика, и нормалью к траектории движения вышеуказанной скобы при их взаимодействии. На фиг. 1 изображен подъемник, общий вид; на фиг; 2 - вид по стрелке А на фиг. 1; на фиг. 3 - узел 1 на фиг. Г; на фиг. 4 - вид по стрелке Б на фиг. 1, при движении платформы вверх и вниз (положение стяжки при движении платформы вниз обозначено пунктирной линией); на фиг. 5 - узел Н на фиг. 4. Подъемник содержит вертикальные мачты 1, на которых закреплены стопоры 2,
подвижные Г-образные стяжки 3 и направляющие зубчатые рейки 4, взаимодействующие с шестернями 5 подъемные механизмы 6 с устройствами 7 для аварийной остановки.
Механизмы 6 содержат оси 8, на которых .при помощи щарниров 9 и 10 крепится грузонесущая платформа 11.
На осях 8 механизмов 6 шарнирно крепятся Л -образные двуплечие рычаги 12 с опорными роликами 13 и пружинами 14. Подпружиненное плечо рычага 12 взаимодействует с конечным выключателем 15.
Платформа 11 в зоне мачт 1 снабжена подвижным полом 16, опирающимся на пружины 17. Под подвижным полом 16 на платформе 11 установлен конечный выключатель 18. На платформе 11 выполнены упоры 19 и 20, взаимодействующие с плечами 21 и 22 Г-образных стяжек 3, которые снабжены механизмами 23 фиксации, состоящими из скобы 24 и корпуса 25, в котором размещены пружина 26, ролик 27, ось 28 которого установлена в продольном пазу 29, выполненном в корпусе 25 под углом к оси пружины 26. Угол Д находится в пределах больше 0° и меньще 90°. На корпусе 26 выполнен выступ 30.
Подъемник работает следующим образом.
При помощи щестерен 5 подъемный механизм 6 вместе с платформой 11 движется по зубчатым рейкам 4 вертикальных мачт, узел соединения Механизма 6 с платформой 11 выполнен с возможностью перемещения по горизонтали с целью предотвращения заклинивания механизмов при перекосе платформы 11. Платформа опирается на ролики 13 подпружиненных двуплечих рычагов 12. При перегрузке платформы 11 пружины 14 сжимаются и плечо рычага 12 воздействует на конечный выключатель 15, который подает сигнал в систему управления. С целью исключения паразитных моментов на
оси 8 механизма 6 подпружиненные рычаги 12 установлены попарно симметрично. Вертикальные мачты 1 соединены между собой при помощи расположенных на мачтах с возможностью вращения Г-образных стяжек 3, механизм 23 фиксации который входит в соединение со стопорами, расположенными на противоположных мачтах. При движении платформы 11 вверх упор 19, расположенный сверху платформы, воздействует на плечо 21 стяжки 3. Стяжка 3 поворачивается вокруг оси. На плечо 21 начинает действовать упор 20, расположенный сверху платформы И. При дальнейшем движении платформы 11 вверх упор 20 нажимает на выступ 30 и механизмами 23 фиксации входит в соединение со стопором 2. При движении платформы вниз рассоединение и соединение механизмов 23 стяжек 3 со стопорами 2 происходит аналогично, только со стяжками 3 взаимодействуют упоры 19 и 20, установленные снизу платформы 11.
При входе в механизм 23 фиксации стопор 2 нажимает на подпружиненный ролик 27 и фиксируется в скобе 24. Усилие нажатия ролика 27 при входе стопора 2 в скобу 24 меньше, чем при выходе стопора 2 из скобы 24, так как ось 28 ролика 27 расположена в продольном пазу 29 под углом к нормали к траектории движения П-образных стяжек.
С целью исключения неправильной работы механизмов 23 фиксации- и Г-образных стяжек 3 платформа 11 снабжена подвижным полом 16, опирающимся на пружины 17. При наличии на платформе 11 в зоне мачт 1 людей и грузов подвижный пол 16 опускается и срабатывает конечный выключатель 18, подающий сигнал в систему управления.
Предлагаемое выполнение позволяет значительно повысить надежность и эффективность работы подъемника.
Л
.З
Вид Б
23 ,2,1
/
.
.г. V
27
uz.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Италии № 602021, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
