:Г
Изобретение ОТНОСИТСЯ к системам автоматического регулирования и предназиачено для формирования первой производной отуправляющего сигнала в бысокоточиых следящих приводах при регулировании в сверхшироком диапазоне скоростей.
Известны корректирующие устройства для ввода в систему производИых от управляющего сигиала. Так, например, задача формирования производной от управляющего сигиала, заданного в цифровой форме, мржет быть решена с помощью цифрового дифференцирования с последующим цифроаналоговым преобразованием. Однако при изненениях скоростей управляющего сигнала в сверхщироком диапазоне возникает задача создания 15 и более разрядных цифроаналоговых преобразователей, которая является крайне затруднительной (1J. Второй известный путь формирования производной от управляющего сигнала заключается в использовании следящей системы, отрабатывающей данный управляющий сигнал которая строится по принципу двухдвигатель ноге привода с мехаиическим сум лироваинем скоростей на механическом дифференциале. В таком приводе существует возможность получения скорости слежения, мало отличающейся от нулевой, в результате чего диапазон регулирования при формировании производных резко возрастает. Эта система характеризуется наличием взаимовлияния
каналов через механический дифференциал, нестабильностью нулевых скоростей вращения выходного вала из-за нестабильности характеристик каналов и ощибки, вызванной люфтами и упругими деформациями в механическом дифференциале (2. Наиболее близКИМ к изобретению техническим решением является корректирующее устройство двухканальной следящей системы комбинирсваниого регулирования, содержащей чувствительный элемент, сумматоры, сервопривод,
дифференциал и тахогенератор. Выработка .корректирующего сигнала этим устройством позволяет п.олучать сигнал в широком диапазоне изменения входной величины, использовать характеристики применяемых тахогенераторов на наилучших участках и обеспечивать необходимую фильтрацию входной величины 3. Однако техническая реализация известного устройства сложна из-за наличия дополнительного механического дифференциала и влияния щумов тахогеиератора и кинематических погрешностей дифференциала на его точность.
Целью изобретения является повышение точности, В описываемом KoppiEKtwpywmeM устройстве это достигается исключением из его структуры чувствительного элемента, дифференциала и тахогенератора, и вводом и соответствующим соединением между собой датчиков скорости и угла и фгазового кбмйаратс я..-
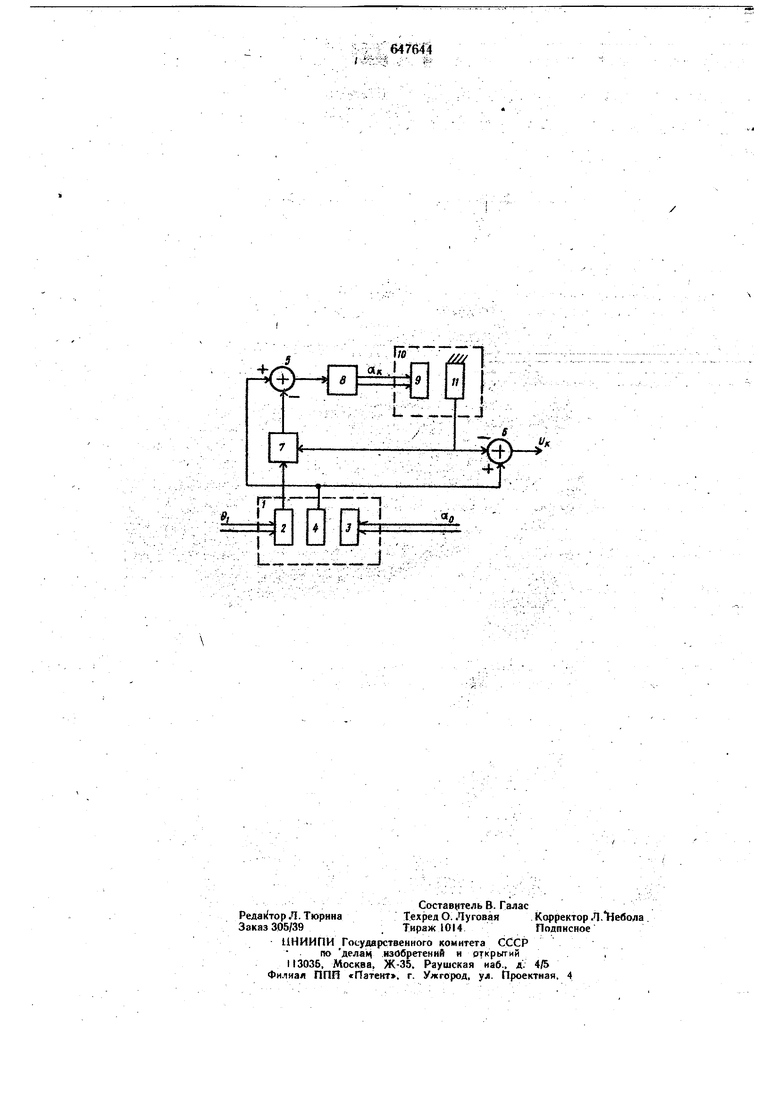
На чертеже представлена функциональная описйваемого корректирующего устройства.
Оно содержит дифференциальный частотный датчик I угла, на сигнальный элемент 2 которого поступает входная величина 61, а модулирующий элемент 3 соединен с внещним приводным двигателем следящей системы. Опорный элемент 4 дат1шка неподвижно укреплен и подключен k первым входам сумм.аторой 5 и 6. Второй вход сумматора 5 связан с выходом фазового компаратора 7, а выход подключен ко входу сервопривода 8. Выход сервопривода 8 соединен с модулирующим элем ентом 9 частотного датчика 10 скорости, сигнальный элемент И которого неподвижно укреплен и связан со вторым входом сумматора 6 и одним из входов фазового компаратора 7. Другой вход фазового компаратора 7 соединен с выходом сигнального элемента 2 датчика 1. Выход сумматора 6 подключен к 8ь1ходу устройства.
Модулирующий элемент датчика 1 вращается с постоянной скоростью ао с помощью внешнего двигателя системы слежения, для которой предназначено корректи|рующее устройство. За счет изменения магнитной проводимости- зубчатого зазора появляется переменная составляющая магнитного потока, индуцирующая переменное напряжение в обмотках опорного 4 и сигнального 2 элементов датчика 1. Частота с выхо а опорного элемента 4 датчика I является задающей для сервопривода 8, а noToiiiy скорости вращения модулирующих элементов 3 и 9, соответственно, датчиков 11 и 10 - равны; так как все элементы датчиков I и 10 имеют одинаковое число меток, то частоты с выходов сигнальных элементов 2 и. 4 датчиков 1 и 10 равны также и отсутствии входного сигнала ©i - синфазоы. С выхода-фазового компаратора- 7 снимается нулевой сигнал. Часто ы с выходов элементов 4 и П Датчиков 1 и Ю равны также, ё потону сигнал на выходе сумматора 6 отсутствует.
Подача сигнала 01 на вход сигнального элемента 2 датчика Г приводит к нарушению
синфазнрсти частот на входах фазового компаратора 7 и появлению дополнительного сигнала на входе сумматора 5. В результате этого скорость OK изменяется, и вал сервопривода 8 доворачивается на определенный угол, что компенсирует фазовое рассогласЬвание частот с выходов элементов 2 и 11 и приводит к исчезновению дополнительного сигнала на входе сумматора 5. В процессе Дбворота за счет разности частот с элемент ТРВ 4 и И .на выходе сумматора 6 присутст-. вует сигнал, компенсирующий ощибку следящей системы.
Таким образом, описываемое устройство VO сравнению с известным имеет повышенную точность из-за применения частных датtiHKOB, характеризующихся значительно более низким щумом, чем у тахогенераторов, и устранение возможности нарушения услоВИЙ компенсации ощибкн, вызванной кинематическими погрешностями и люфтами Механического дифференциала. Сравнительные испытания описываемого устройства и известного в системе следящего электропривода пokaзaли, что точность слежения при применении изобретения увеличивается в три- четыре раза.
Формула изобретения
Корректирующее устройство, содержащее сервопривод, первый и второй суммато- ры, отличающееся тем, что, с цельюповышения точности устройства, в него введены датчик сксфрстй, фазовый компаратор и датчик угла, входы которого соединены с первым и вторым входами устройства, первый быход - с первыми входами первого и второго сумматоров, а второй выход - с первым входом фазового компаратора, выход которого Подключен ко второму входу первого CySr iaTopa, вход датчика скорости соединен с выходом устройства, а выход - со вторым входом фазовогб компаратора и вторым входом второго сумматора.
Источники информации, принйтыевь внимание при экспертизе
1.«Динамика цифровых следящих Сйстем, Ред. Б. к;. Чемоданова. М., «Энергия, 1970:
2.Школьников Б. М. и Суд И. П. Некоторые свойства и расчет системы многодвигатеЛъного tfpивoдa с механическим дифференциалом. «Электричество, 1958, № 6.
3.Авторское свидетельство СССР № 498603, кл. О 05 В П/01, 1974.
.-J.
Fo
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Двухканальная следящая система | 1975 |
|
SU570880A1 |
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Двухдвигательный следящий привод | 1972 |
|
SU481876A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| Следящий привод | 1974 |
|
SU641393A1 |
| Следящий привод | 1977 |
|
SU857924A1 |