1 Изобретение относится к вспомогательному обо1)удованию рудничного транспорта, а именно к толкателям для проталкивания нерасцепленных сос тавов вагонеток. Известен гидравлический толкатель для вагонеток, имеющий ползуны с рабочими кулаками, связанные между собой гибкой связью, совершающие возвратно-поступательное движение от силовых цилиндров, расположенных рараллельно -на одной раме 1 J. Однако ввиду трудности размещения толкающих кулаков, гидроцилиндров, ползунов с направляющШШ и системы автоматического управления ползунамй, в малом габарите по длине подвагонного упора вагонетки создать на дежно работающую конструкцию не пред ставляется возможным. Наиболее близким к предлагаемому из известных технических решений является гидравлический толкатель для проталкивания состава вагонеток включающий гидроцилиндры, направляющую с установленными на ней кареткам с подпружиненными кулаками и гидросистему С23.. ( Однако импульсное многоразовое воздействие гребенки кулаков толкателя на вагонетку в процессе ее проталкивания создает большие динамические нагрузки, снижает скорость вследствие наличия обратного холос:того хода кулаков гребенки, что сни жает производительность и надежность работы толкателя на погрузочном пунк те и опрокидывателя. Кроме того, не обеспечивается надежное подтормажива ние состава при установке толкателя на згчастках пути с переменным про||илем с наличием самокатных уклонов и у стопора опрокидывателя, так как при дистанционном, управлении кулаками своевременно предугадать оператору увеличение скорости движения состава и затормозить его невозможно. Возможно только его стопорение. Но жесткий удар при несвоевременном переключении роликов на подтормаживание состава приводит к их заклинива- 0 нию на упорах кулаков и поломке последних под действием движущегося с увеличенной скоростью состава.
Недостатком является также возможность отказов в работе дистанцион- 55 йоге механизма переключения при ререрсировании состава ввиду необходи 1ости управления большим числом Kyt
17, упор 18. Б исходном положении штоки гидроцилиндров 1 вдвинуты в цилиндры. Первая вагонетка состава устанавливается в зоне каретки 3 левого гидроцилиндра. При зтом ее кулак 11 находится в верхнем положении под действием пружины 13 и охватывает своей профилирующей вогнутой поверхностью подвагонньй упор зтой вагонетки. Сектор 4 у зтого гидроцилиндра повернут на вертикальной оси 7 так, что он открывает проем в направляющей 2 для упорного пальца 12.
При включении маслостанции, соединенной коммуникацией 10 гидроиилиндрами, подача масла в указанный левый гидроцилиндр 1 при помощи профили475лаков гребенки и суммирования ошибок от остаточной вытяжки и изготовления элементов цепи с роликами. Надежность его еще в большей степени понижается из-за сложности устройства. Цель изобретения - повышение надежности в работе. Поставленная цель достигается тем, что в гидравлическом толкателе для проталкивания состава вагонеток, включающем гидроцилиндры, направляющую с установленными на ней каретками с поддружиненными кула ками и гидросистему, направляющая имеет поворотные секторы, связанные с ней вертикальными осями и размещенные в проемах, выполненных в направляющих, при этом секторы связаны между собой попарно при помощи подпружиненных тяг с приводом, а каждый кулак вьшолнен с впадиной для размещения подвагонного упора и имеет палец, установленный с возможностью размещения в проеме направляющей. На фиг. 1 показан толкатель; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - каретка толкателя; на фиг. 4 - разрез Б-Б на фиг. 3;.на . фиг. 5 - разрез В-В на фиг. 3. Толкатель содержит гидроцилиндры 1, направляющую 2, каретки 3, секторы 4, соединительные тяги 5, подпружиненные тяги 6, вертикальные оси 7 секторов, рычаги 8, привод 9 секторов, коммуникации 10 с кранами управления . Каретка толкателя содержит профилированный кулак 11, упорный палец 12, пружину 13, опорные ролики 14, корпус 15, ось 16, поворотный выступ рованного кулака 11 перемещает первую вагонетку состава вдоль направляющей в направлении втброго гидроцилиндра 1.. Кулак 11 каретки 3 второго гидроцилиндра 1 в исходном положении опущен вниз и удерживается в этом положении за упорный палец 12 нижне поверхностью направляющей, ввиду того, что правый крайний сектор 4 это го гидроцилиндра повернут на оси 7 так, что закрывает проем направляющей 2. При подаче масла в левый гид роцилиндр 1 одновременно оно подает ся и на ход вперед правого гидроцилиндра 1, При этом его кулак 11 перемещается навстречу кулаку 11 пе вого гидроцилиндра в спущенном положении, 6 процессе движения кулака 11 ле вого гидррцилиндра в случае, если состав начнет перемещаться под уклон по рельсовому пути и его скорос превысит скорость кулака толкателя, то подвагонный упор, находяощйся в вогнутой части профилированного кулака, упрется в переднюю часть последнего и вагонетка может подтормаЖ1 1ваться пут.ем увеличения сопротивления истечению жидкости из штоково полости гидроцилиндра 1. Подтормажи вание состава при этом может быть обеспечено аналогично и в случае, если скорость движения каретки будет снижена путем уменьшения количества подаваемой от маслостанции жидкости, что обеспечивается извест ньпу1И методами автоматического или дистанционного управления толкателем путем воздействия на кран управ ления либо на один из насосов. При перемещении кулака 11 левого гидроцилиндра 1 на Полный ход кулак 11 своим упорньм пальцем 12 в момент подтормаживания упирается в верхнюю часть поверхности направляющей и поэтому не утапливается и продолжает движение по ней с уменьшенной скоростью еще и за счет увеличения силы трения упорного пальца по направляющей. При подходе к правому крайнему положению кулак гидроцилиндра 1 упирается упорным пал цем в сектор 4. Последний, ввиду наличия подпружиненной тяги 6, повора ивается, открьшая проем в направля ющей,- в которую упорный палец 12 кулака 11 при этом опускается ввиду 75 наличия соответствующего скоса в секторе, а также вследствие контактирования с упором 18 поворотного выступа 17 на кулаке 11. После опускания кулака 11 проем в направляющей закрывается указанным сектором под воздействием подпружиненной тяги. Одновременно с подходом кулака 11 левого гидроцилиндра к крайнему правому положению в это же положение приходит и кулак 11 правого гидроцилиндра 1. Поскольку сектор 4 его в этом положении не закрьшает соответствующего проема в направляющей, кулак 11 правого гидроцилиндра из нижнего положения поднимается под действием его пружины в верхнее, охватьшая профилирующей вогнутрй поверхностью подвагонный упор первой вагонетки состава в момент, когда кулак 11 левого гидроцилиндра 1 начинает спускаться в нижнее.положение и освобождает подвагонный упор этой вагонетки. Поскольку эти кулаки смещены относительно продольной оси один вправо, а другой влево,они между собой не контактируют. По достижений каждым из этих кулаков крайнего поло- . жения подача жидкости в гидроцилиндры происходит при помощи системы управления с датчиками в обратном направлении. Кулак 11 левого гидроцилиндра 1 при этом перемещается в первоначальное положение опущенным, так как упирается упорным пальцем 12 в нижнюю поверхность направляющей, а кулак 11 правого гидроцилинД-. 3 1 , находясь в верхнем положении под действием пружины 13, тянет на себя состав за подвагонный, упор, опираясь на верхнюю поверхность направляющей упорным пальцем 12. При этом суммарньп ход первого и второго педроцилиндров 1 равен расстоянию между подвагонными упорами соседних вагонеток состава, что позволяет таким образом обеспечить поочередное плавное проталкивание всех вагонеток состава при подтормаживании их в случае необходимости в процессе проталкивания и автоматическом режиме. В случае, если первая вагонетка состава установлена подвагонньм упором вне зоны профильного кулака, последний ее протолкнет внешней частью кулака в зону работы профильного кулака второ-
.О гидроцилиндра и дальнейшая работа будет осуществляться нормально согласно, изложенному.
Для обеспечения проталкивания состава в обратном направлении необходимо при помощи привода 9 секторов повернуть все сектора 4 на их осях во второе положение, при котором открытые проемы в направляющей будут закрыты, а закрытые-открыты.
В этом случае в крайнем исходном положении кулак 11 правого гидроцилиндра 1 при втянутом поршне, будет установлен в верхнем положении под действием пружины, так как проём в направляющей при этом сектором 4 будет открыт, соответственно, кулак 11 левого гидрощшиндра при втянутом поршне будет опущен, поскольку сектор 4 его закрывает соответствующий проем в направляющей. Правый гидроцилиндр 1.при подаче в него масла начнесг при помощи кулака 11 проталкивать за подвагонный упор вагонетку в противоположном направлении аналбгично описанному выше.
Обмен вагонеток в опрокидывателе Р1ри помотщ предлагаемого гидравлического толкателя может быть осущесвлен при установке по схеме тЪлкатель-опрокидьюатель-толкатель, как в известных толкателях, при условии установки перед первым .толкателем задерживающих стопоров. При этом предпочтительной является установка задерживающих стопоров, стопорящих вагонетки, не за скаты, а за подвагоный упор. Аналогично серийным толкателям может быть обеспечена работа предлагаемого толкателя и при маневровых работах на приемоотправительных площадках.
Таким образом, толкатель ятзпяется универсальным и в отличие от известных обеспечивает возможность надежного автоматического подтормаживания состава при работе на погрузочных пунктах, у опрокидывателей и реверсировании, что расширяет область применения гидравлических толкателей при механизации погрузочных пунктов с наличием участков рельсового пути с переменными уклонами, у опрокидывателей и на выработках, где по правилам безопасности не допускается использование электровозов, позволит получить значительный технико-экономический эффект в угольной промьшшенности и исключить применение ручного труда.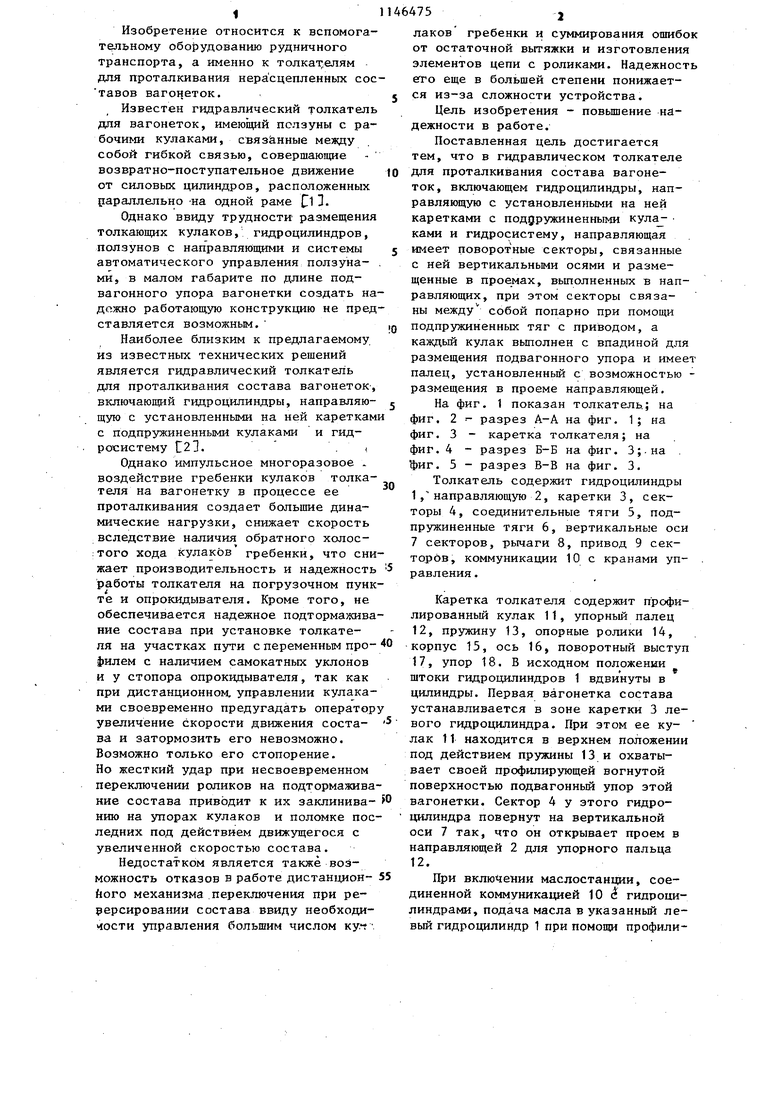

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |
| КАНАТНЫЙ ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 1969 |
|
SU232902A1 |
| УСТАНОВКА ДЛЯ РАЗГРУЗКИ НЕРАСЦЕПЛЕННЫХ СОСТАВОВ | 1966 |
|
SU180130A1 |
| Гидравлический толкатель | 1978 |
|
SU775344A1 |
| Реверсивный шахтный толкатель | 1980 |
|
SU1011867A1 |
| СТОПОР-ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 1970 |
|
SU283534A1 |
| Толкатель нижнего действия для обмена вагонеток в клети | 1975 |
|
SU602464A1 |
| Устройство для проталкивании вагонеток в опрокидыватель | 1950 |
|
SU92456A1 |
| Толкатель для перемещения вагонеток через стрелочный перевод рельсового пути | 1973 |
|
SU451604A1 |
| Устройство для перемещения состава вагонеток | 1981 |
|
SU1010296A1 |


ФигЗ
б-fi
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 0 |
|
SU298754A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Толкатель гидравлический для вагонеток | 1974 |
|
SU601433A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
