Устройство для перемещения и укладки плоских деталей относится к транспортирующей технике, обеспечивающей укладку изделий на рабочую или промежуточные позиции.
Известно устройство, содержащее транспортирующие шнуры, передние и задние упоры остановки и фиксирования транспортируемой детали на позиции измерения. При перемещении, транспортирующие шнуры удалены друг от друга конусными роликами, а верхние их кромки подняты над базовой плитой за счет касания конических роликов на больщем их диаметре. Опускание детали на позицию измерения осуществляется путем реверса электродвигателя. При этом концевые ролики сближают шнуры и перемещают их на меньший диаметр касания с коническими роликами.
Недостатком известного устройства является невозможность получения большого хода шнуров в вертикальном направлении вследствие недопустимрсти больших углов конусности конических роликов, так как в противном случае действием натяжения шнуров на первых и последних конических роликах и веса транспортируемых деталей шнуры опускались бы вниз вдоль образующих этих РОЛИКОВ. Кроме того, наличие проскальзывания шнуров по нижней поверхности детали при их реверсе, когда деталь упирается в задние упоры, а шнуры движутся в сторону, противоположную транспортированию, и опускаются вниз, что в некоторых случаях может быть недопустимо, например. при транспортировании полупроводнико- Q лены
вых пластин из-за возможных повреждений и загрязнений их поверхности.
Наиболее близким по технической сущности и достигаемому результату является устройство для перемещения и укладки плоских деталей, включающее подъемную каретку с ведущими и ведомыми элементами, огибающие их транспортирующие шнуры с механизмом их привода в виде установленного на приводном валу шкива, связанного с ведущими элементами, и механизм подъема каретки.
Недостатком данного устройства является применение дополнительного привода в механизме подъема каретки, что усложняет конструкцию устройства в целом и снижает надежность его работы.
Целью изобретения является повышение надежности работы устройства.
с. .-..
Поставленная цель достигается тем, что в устройстве для перемещения и укладки плоских деталей, включающем подъемную каретку с ведущими и ведомыми элементами, огибающие их транспортирующие шнуры с механизмом их привода в виде установленного на приводном валу шкива, связанного с. ведущими элементами, и механизм подъема каретки, шкив выполнен с радиусным пазом и установлен на приводном валу посредством втулки, жестко смонтированной на последнем и имеющей размещенный в радиусном пазу шкива штифт, при этом механизм подъема каретки выполнен в виде, эксцентрика, свободно установленного на втулке и имеющего lynop, укрепленного на подъемной ка- . 1ретке с возможностью взаимодействия с эксцентриком ролика и смонтированного на подъемной каретке ограничии упоры 6. Элементы 4 и 5, закрепленные на раме 7, выполненной в виде вилки, охватываются транспортирующими шнурами 8. Механизм привода шнуров выполнен в виде приводного от электродвигателя вала 9, втулки 10, штифта
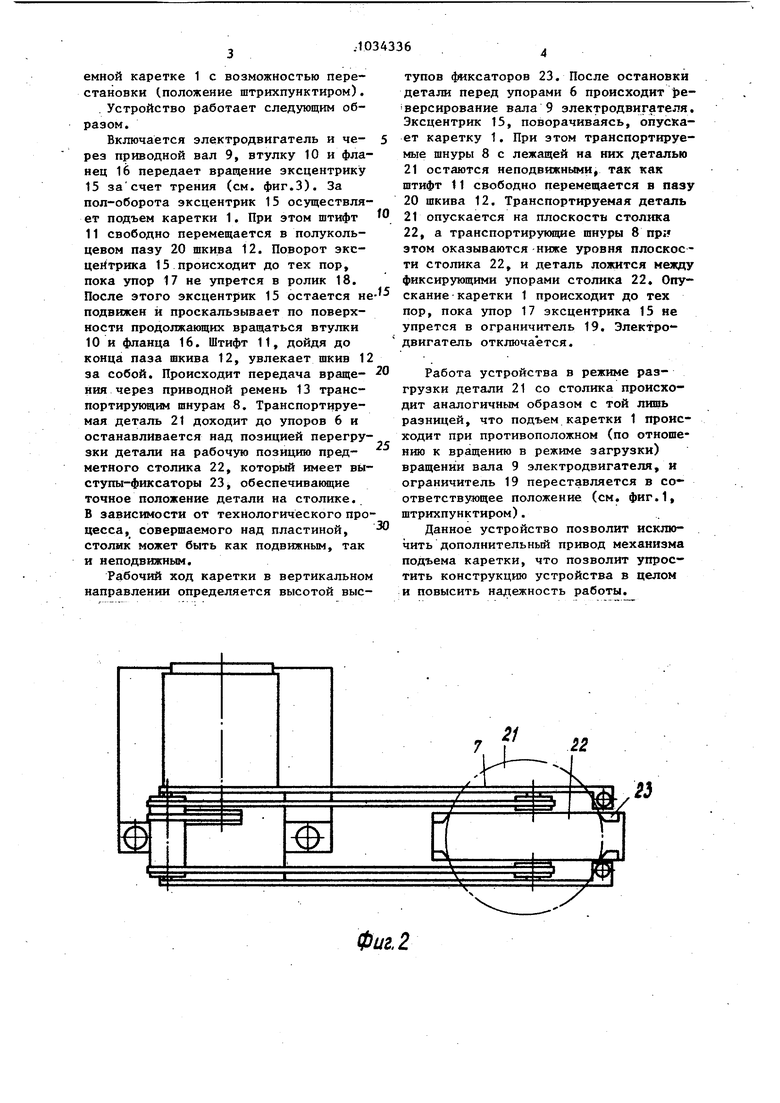
. .11, ,шкива 12 и приводного эластичного ремня 13, связьдаающего ведущие элементы 4 со шкивом 12. Втулка 10 соединена со шкивом 12 подшипником качения 14. Механизм подъема каретки работает от приводного вала 9 электродвигателя и выполнен в виде эксцентрика 15, свободно установленного с возможностью вращения на втулке 10 и фланце 16 упора 17, укрепленного на эксцентрике 15, ролика 18, установленного на подъемной каретке 1 и ограничителя 19, смонтированного на подътеля, причем шкив установлен на втулке с возможностью свободного вращения, а штифт - на эксцентрике с возможностью взаимодействия с роликом и ограничителем каретки. На фиг.1 показано предлагаемое устройство, вид сбоку; на фиг.2 то же, вид сверху; на фиг.З - разрез А-А на фигП; на фиг.4 - разрез Б-Б на фиг.З. Устройство для перемещения и укладки плоских деталей состоит из подъемной каретки 1, перемещающейся по вертикальным направляющим 2, закрепленным в основании 3, На каретке 1 установведущий 4 и ведомый 5 элементы емкой каретке 1 с возможностью перестановки (положение штрихпунктиром). . Устройство работает следующим образом. Включается электродвигатель и через приводной вал 9, втулку 10 и фланец 16 передает вращение эксцентрику 15 засчет трения (см. фиг.З). За пол-оборота эксцентрик 15 осуществляет подъем каретки 1. При этом штифт 11 свободно перемещается в полукольцевом пазу 20 шкива 12. Поворот эксцейтрика 15 происходит до тех пор, пока упор 17 не упрется в ролик 18. После этого эксцентрик 15 остается не подвижен и проскальзывает по поверхности продолжающих вращаться втулки 1О и фланца 16. Штифт 11, дойдя до конца паза шкива 12, увлекает шкив 1 за собой. Происходит передача вращения через приводной ремень 13 транспортирующим шнурам 8. TpaHcnopTtipyeмая деталь 21 доходит до упоров 6 и останавливается над позицией перегрузки детали на рабочую позицию предметного столика 22, который имеет выступы-фиксаторы 23, обеспечивакщие точное положение детали на столике. В зависимости от технологического про цесса, совершаемого над пластиной, столик может быть как подвижным, так и неподвижным. Рабочий ход каретки в вертикальном направлении определяется высотой вые- тупов фиксаторов 23. После остановки детали перед упорами 6 происходит 1)е версирование вала 9 электродвигателя. Эксцентрик 15, поворачиваясь, опускает каретку 1. При этом транспортируемые шнуры 8 с лежащей на них деталью 21 остаются неподвижными, так как штифт 11 свободно перемещается в пазу 20шкива 12. Транспортируемая деталь 21опускается на плоскость столтса 22, а транспортирующие шнуры 8 при этом оказываются ниже уровня плоскости столика 22, и деталь ложится между фиксирующими упорами столика 22, Опускание каретки 1 происходит до тех пор, пока упор 17 эксцентрика 15 не упрется в ограничитель 19. Электродвигатель отключается. Работа устройства в режиме разгрузки детали 21 со столика происходит аналогичным образом с той лишь разницей, что подъем каретки 1 происходит при противоположном (по отношению к вращению в режиме загрузки) вращении вала 9 электродвигателя, и ограничитель 19 переставляется в соответствующее положение (см. фиг.1, штрихпунктиром). Данное устройство позволит исклю- . чить дополнительный привод механизма подъема каретки, что позволит упростить конструкцию устройства в целом и повысить надежность работы.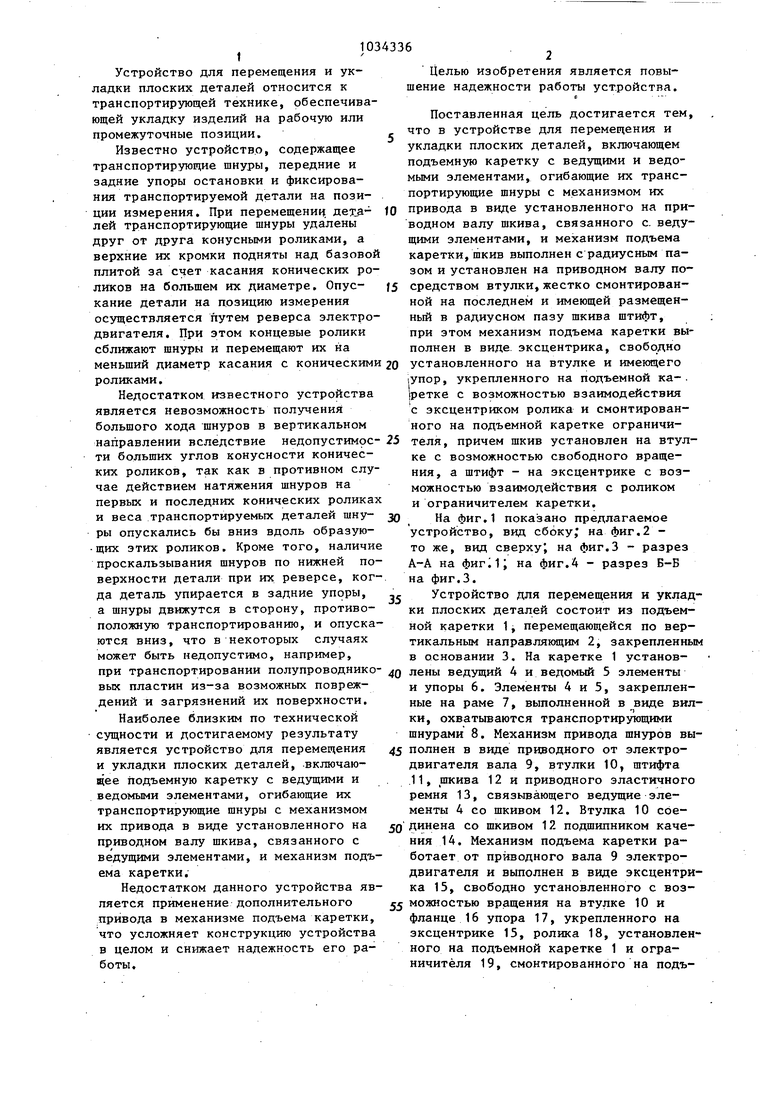
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения и укладки плоских деталей | 1990 |
|
SU1740288A1 |
| Устройство для транспортирования и подачи на рабочую позицию плоских деталей | 1982 |
|
SU1098876A2 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1994 |
|
RU2064860C1 |
| Устройство периодического действия для транспортирования плоских деталей | 1979 |
|
SU866939A1 |
| Устройство для транспортирования и подачи на рабочую позицию плоских деталей | 1982 |
|
SU1046177A1 |
| Автомат-укладчик кирпича-сырца на сушильные рамки | 1982 |
|
SU1096117A1 |
| Устройство для распределения деталей | 1982 |
|
SU1071544A1 |
| ПРЕССОВЫЙ АГРЕГАТ | 1990 |
|
RU2043815C1 |
| ПРЕССОВЫЙ АГРЕГАТ ДЛЯ ОБРАБОТКИ ДАВЛЕНИЕМ (ВАРИАНТЫ) | 1990 |
|
RU2082614C1 |
| Устройство для контроля и сортировки деталей | 1971 |
|
SU479499A1 |

УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И УКЛАДКИ ПЛОСКИХ ДЕТАЛЕЙ, включающее подъемную каретку с ведущими и ведомыми элементами, огибающие их тран- спортируюпще шнуры с механизмом их привода в виде установленного на приводном валу шкива, связанного с ведущими элементами, и механизм подъема каретки, отличающееся . тем, что, с целью повышения надежноети работы устройства, шкив выполнен с радиусным пазом и установлен на 1 приводном валу посредством втулки, жестко смонтированной на последнем и имеющей размещенный в радиусном пазу шкива штифт, при зтом механизм подъема Каретки выполнен в виде эксцентрика, свободно установленного на втулке и имеющего упор, укрепленного на подъемной каретке с возможностью взаимодействия с эксцентриком ролика и смонтированного на подъемной, каретice ограничителя, причем шкив установлен на втулке с возможностью свобод§ ного вращения, a штифт - на эксцентрике с возможностью взаимодействия с (Л роликом и ограничителем каретки. 00 00 Од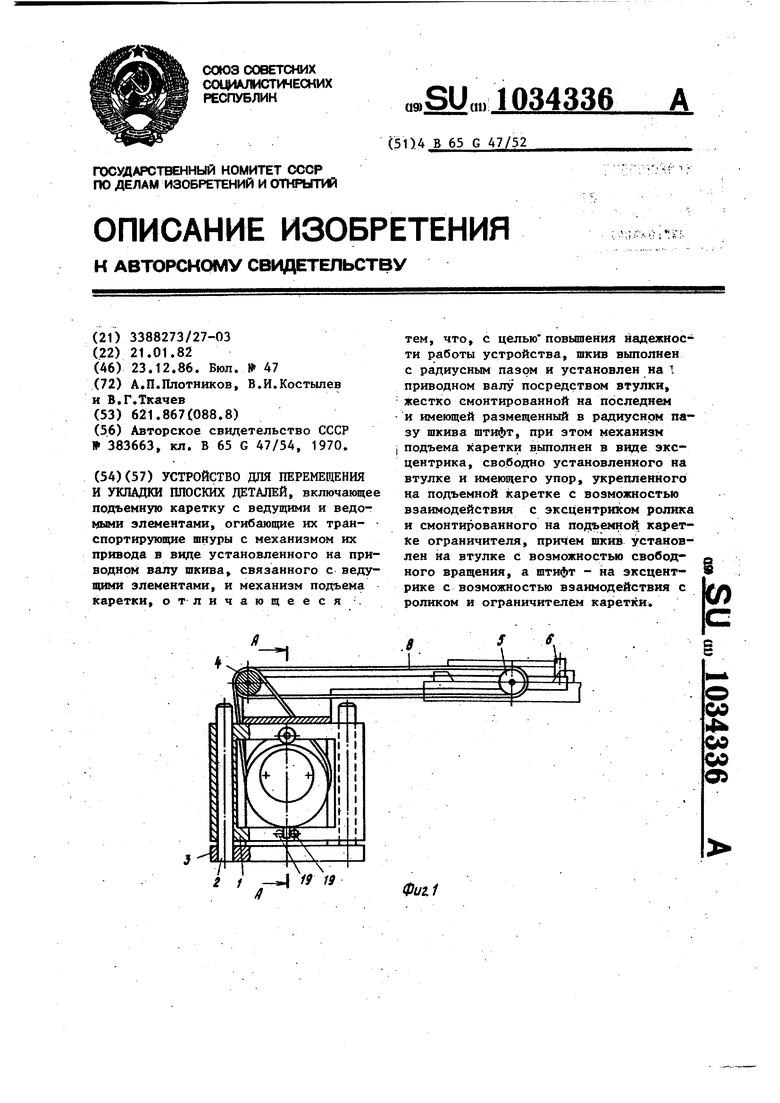
Фиг. 2
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ИЗДЕЛИЙ С | 0 |
|
SU383663A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
