00 СП
сд
о:)
СП Изобретение относится к автоматическому регулированию, а более конкретно к проектированию самонаст раивающихся систем. Известна самонастраивающаяся система, состоящая из собственно настраиваемой системы и блока самонастройки, который осуществляет н стройку системы по заданному закону с целью обеспечения системой заданного критерия качества работы. Самонастраивающаяся система может работать в режиме автомата-настройщикаВ таком режиме блок самонастройки автомат-настройщик) подключаетс к настраиваемой системе только на время настройки. Следовательно, недостатком этой системы является низкая точность. Наиболее близкой к изобретению является самонастраивающаяся система, содержащая блок сравнения и генератор ступенчатых сигналов,, выход которого соединен с входом эталонной модели и первым входам настраиваемой системы, вторые входы которой соединены с соответствующими выходами блока настройки С2. Недостаток известной системы является малая точность. Цель изобретения - повышение точности системы. Указанная цель достигается тем, что она содержит блок дифференциато ров , первый и второй фильтры и после довательно соединенные генератор временных интервалов и блок умножения, выход которого соединен с первы входом блока настройки, второй вход с выходом блока сравнения, выходы эталонной модели и настраиваемой системы через первый блок фильтров и второй блок фильтров соответствен но соединены с первым и вторьпи входами блока сравнения, первый вход настраиваемой системы соединен с вхо дом генератора временных интервалов а выходы через блок дифференциаторов - с вторыми входами блока настро ки. Известно, что для обобщенной стру туры изображение сигнаша в точке чув ствительности системы по К настраиваемог1у параметру определяется выражениемм(о-,.ЭФ№)/91Чг(р ) ) - передаточная функция замкну той системы, (р)- входной сигнал. При работе самонастраивающейся системы в режиме автомата-настройщика целесообразно настраивать систему по виду переходного процесса (реакция системы на скачок). В этом случае ttP)--i|P . (г) Из выражений (1) и ( 2 ), можно получить . nv , - ЭФСР)/Э)(1 - (Ь(Р) (3) Дифференцируя обе части уравнения (3) по аператору Лапласа и производя простейшие преобразования, получаем М«41. ЭФ(.Р}/ЭР Вводя обозначения (р) можно записать 9F(P) Э . K--iftPVi(p)3, Из формулы 5) следует, что функция чувствительности может быть I9К : . получена путем домножения на t(операции Э/Эр в области изображений соответствует домножение оригинала на-tв области оригиналов производной сигнала У ШСсигнала в i-и точке чувствительностиЛ Относительная производная F(p может быть получена структурным способом. Для структуры, показанной на чертеже можно записать np)--v,(p)H... V HPJ iiP; w, М,Ср)Г.... .... P4w,, SJ/.,, vxv,., WiF -V.lP). И1 .)/эр , 1-,4,г,... и ( 5) (o)-V..- передаточная функция Г i-ro звена,- (б) A,j A(.P) wB(p}. - некоторые полиномы от p. Подставляя выражение (б в выражение (5) получаем, что слагаемые вида 5Vi /VC/, а следовательно и выражения заключенные в квадратные скобки в формуле (4) не зависят от значений настраиваемых параметров так как 2В(р)/ЭР Г А(р) В(р) Таким образом, относительная производная Р(р)может быть получена путем сложения сигналов из соответствующих точек чувствительности, предварительно пропущенных через вспомогательные фильтры, параметры которых не зависят от значений настраиваемых параметров. Вводя обозначения для передаточ ных функций вспомогательных фильтровivv .p)...., «чь1.1р nPJ , w,.,,.-,JPM выражение ( 4 У записывается в виде Flp)-V,(p)4v()4i(p)...V,{p)it.,(p) (7 ) Уравнение известного ёщгоритма беспоисковой градиентной настройки имеет вид - )|, (8) где Kj- скойрсть изменения I-го на раиваегюго параметра, - коэффициент передачи i -го канала настройки; 6(i)- сигнал разности между выходными сигналами настраи.ваемой системы и эталонной . модели; олсЩ -i -я функция чувствительност 3Ki - выходной сигнал настраивае сШ системы. Если в качестве выходного сигна j системы использовать сигнал численный согласно формуле (7) бло ком формирования, то известное ура нение динамики с учетом формулы (5 записывается в виде tir- -ilc(t)-FgU) где (-t)- оригинал относительной п изводной настраиваемой с темы,- Fq(4;)- оригинал относительной п изводной эталонной модел Приращение i-го настраиваемого параметра за один шаг настройки оп деляется по формуле i imcit)-F3a)) .0 .. Следует отметить, что функции .Fj.(p) ирд (р) однозначно связаны соотв ственно с фс(р)и фд (р) равенством tfn-t (Р)|ЭР . Р)--фш Настройка идет в сторону миними ции (i). , )-Рэ, поэтому ) Тэйсправедливо равен вофр(р ) - система настроена к своему эталону. На чертеже изображена самонастраивающаяся система. Генератор ступенчатых сигналов 1 подает одновременно единичные скачки на генератор временных интервалов 2, на вход эталонной модели 3 и вход настраиваемой системы 4. Выходы фильтров подключены к входам блока сравнения 7, выход которого соединен с входом блока умножения 8, второй вход которого подключен к выходу генератора временных интервалов. Первый вход блока настройки подключен к выходу блока сравнения 7, а группа входов подключена к труппе выходов блока дифференциаторов 10, входы которого подключены к выходам настраиваемой системы 4. Самонастраивающаяся система в режиме автомата - настройщика работает следующим образом. Генератор ступенчатых сигналов 1 одновременно подает единичный скачок на вход эталонной модели 3 и настраиваемой системы 4 и запускает генератор временных интервалов 2, который вырабатывает сигнал, пропорциональный времени t . Фипьтрл 5 и 6 вычисляют сигналы соответственно )1, ца)), которые сравниваются блоком сравнения 7. На выходе блока умножений 8 формируется сигнал ; |;T:,a)-F,tt)t, который подается на вход блока настройки 9. Дифференцирующее устройство 10 вычисляет производные сигналов в требуемых точках чувствительности и подает их на группу входов блока настрбйки 9. Блок настройки 9 осуществляет вычисление приращений настраиваемых параметров по формуле ( 9 ) и производит настройку настраиваемьйс параметров. После окончания шага настройки, равного времени переходного процесса эталонной модели 3, настройка прекращается, генератор сигнала времени 2 переходитв начальное (нулевое) состояние, затем осуществляется следующий шаг настройки и так далее до достижения условия р Ш-РэН); Конструктивно генератор временных интервалов 2 представляет собой интегратор, на вход которого подано постоянное напряжение. Блок настройки 9 состоит из множительно-интегрирующих устройств, в.ьтолненных на базе двухфазных асинхронных микродвигателей. Блоки 5,6,7 и 10, выполнены на операционных усилителях. Величина коэффициента k-4 определяет скорость настройки и устойчивость процесса настройки. Коэффициент Х определяется известными методами поисковой оптимизации. Предложенное устройство позволяет осуществлять автоматическую настройку
51035565
систем по виду переходного процесса.блока умножения, генератора временБлагодаря отсутствию подстройки интервалов, блока настройки в
ков контура настройки ( фильтров, бло-1,5-2 раза повьиается точность иастка сравнения, блока дифференциаторов, ройки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат-настройщик для систем управления | 1980 |
|
SU924669A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU1023281A2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1109713A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Адаптивная система управления | 1977 |
|
SU634234A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система управления с сигнальной настройкой | 1984 |
|
SU1244635A1 |
САМОНАСТРА1ШАЮ1ДАЯСЯ СИСТЕМА, содержащая блок сравнения и генератор ступенчатых сигналов, выход которого соединен с входом эталонной модели и первым входом настраиваемой систеNM, вторые входы которой соединены с соответствующими выходами блока настройки, отличающаяся тем, что, с целью повьиаения точности системы, она содержит блок дифференциаторов, первый и второй фильтры и последовательно соединенные генератор временных интервалов и блок умножения, выход которого соединен с первым входом блока настройки, второй вход - с выходом блока сравнения, выходы эталонной модели и настраиваемой системы через первый блок фильтров и второй блок фильтров соответственно соединены с первым и вторым входами блока сравнеi ния, первый вход настраиваемой системы соединен с входом генератора (Л временных интервалов, а выходы через блок дифференциаторов - с вторыми входами блока настройки..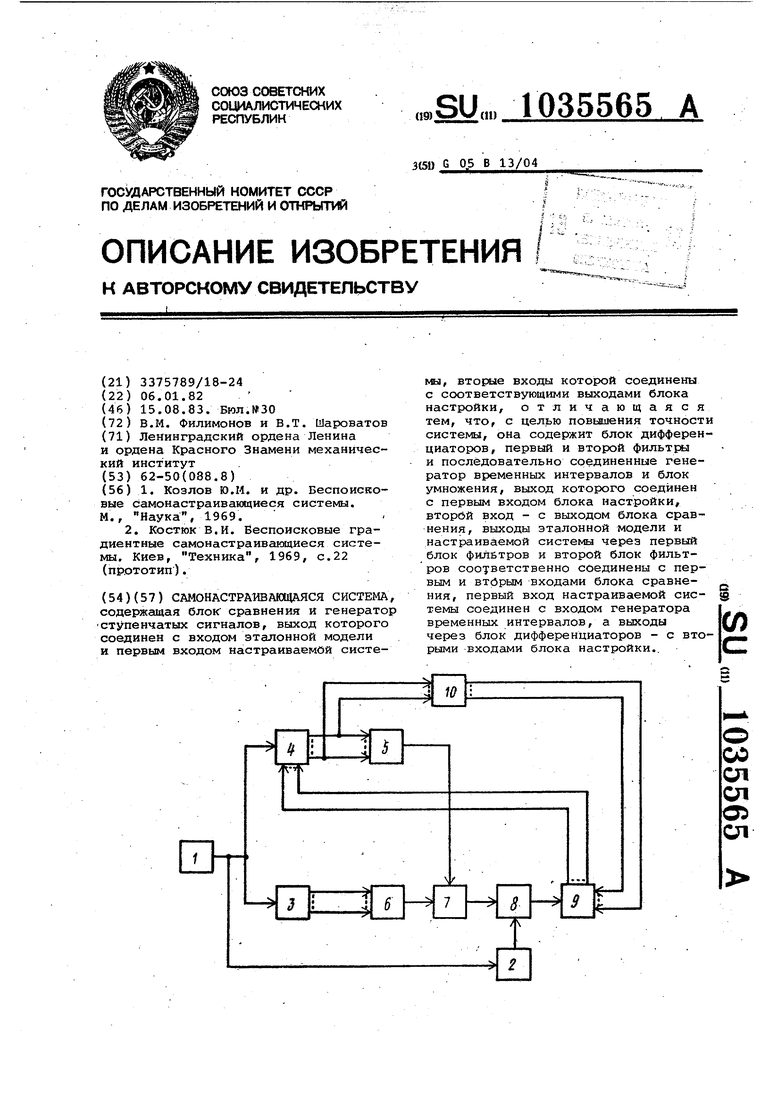
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Козлов Ю.М | |||
| и др | |||
| Беспоисковые самонастраиваюециеся системы | |||
| М., Наука, 1969 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Костюк В.И | |||
| Беспоисковые градиентные самонастраивающиеся системы, Киев, Техника, 1969, с.22 (прототип). | |||
