Изобретение относится к автоматическому регулированию, а более конкретно проектированию самонастраивающихся систем управления методом сигнальной настройки.
Цель изобретения - повышение точности настройки системы.
На чертеже представлена блок-схема системы.
Система содержит датчик 1 входного воздействия, первый сумматор 2, регулятор 3, объект управления 4, эталонную модель 5, второй сумматор 6, блок 7 деления, блок 8 задержки и блок 9 умножения.
Передаточная функция замкнутой системы может быть записана в виде
Т-Ф.,
(1)
де 1 - желаемая передаточная функция - отклонения реапьной передаточной функции от желаемой (в том числе и внешние возмущения) .
Сигнал на выходе системы управления будет иметь вид
:/ Ч Р,
р . . ,
где Y - сигнал на йыходе системы управления, f - - .
F - сигнал на входе системы управления.
Для работы системы необходимо подать дополнительный сигнал U, тогда выходной сигнал будет иметь вид
Y . Ф(Г + и) или с учетом (1)
Y (- ) (F + и) %F + + + .
Кроме того, необходимо, чтобы дфр + +Фл,и о или
+Фи О,
тогда ф
п - Z тг и - - f,
так как
Переходя ко временной области, получим следующее соотношение:
i . t
5u()y(.t- )--- Sly c v Ум)|рЬ )
или h
IaliAi)g (t-iAt) -i.(M (iAt)-y(iAt))F{t--;a)
T--1 при i 1 и t dt
15
25
20
и((У (ли-Ум(б))(о1;
((y tAtvy ut b
так кик за начальный можно принять любой момент времени, то вьфажение (2 справедливо для всей временной оси.
Система управления работает следующим образом.
Сигнал входного воздействия поступает на эталонную модель 5 и на настраиваемую систему управления. На второй сумматор 6 подается сигнал с выходов регулятора 3 и эталонной модели 5 . На выходе второго сумматора 6 формируется сигнал, пропорциональный отклонению реального выходного сигна- ла от сигнала, поступающего с выхода эталонной модели 5,.Блок 7 деления,
- О блок 8 задержки и блок 9 умножения реализуют требуемый сигнал настройки. Формула изобретения Самонастраивающаяся система управления с сигнальной настройкой, содер35 жащая пс5следоватепьно соединенные датчик входного воздействия, первый сумматор и регулятор, подключенный выходом к В1ХОДУ объекта управления, и эталонную модель, вход которой соеди40 нен с выходом датчика, входного воздей- .ствия, а выход - с первым входом второго сутугматора, второй вход которого соединен с выходом регулятора и вторым входом первого сумматора, о т 45 л и ч а ю щ а я с я тем, что , с целью повышения точности настройки системы, дополнительно введены последовательно соединенные блок деления, блок задержки и блок умножения
50 выход которого соединен с третьим входом первого сумматора, а второй вход - с выходом второго сумматора, выход Датчика входного воздействия подключен к первому входу блока деле55 ния, второй вход которого соединен с выходом регулятора.
I1 jk i I
)-
Редактор Н.Слободяник
Составитель П.Кудрявцев
Техред М.Ходанич Корректор Л.Патай
Заказ 3914/50Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
5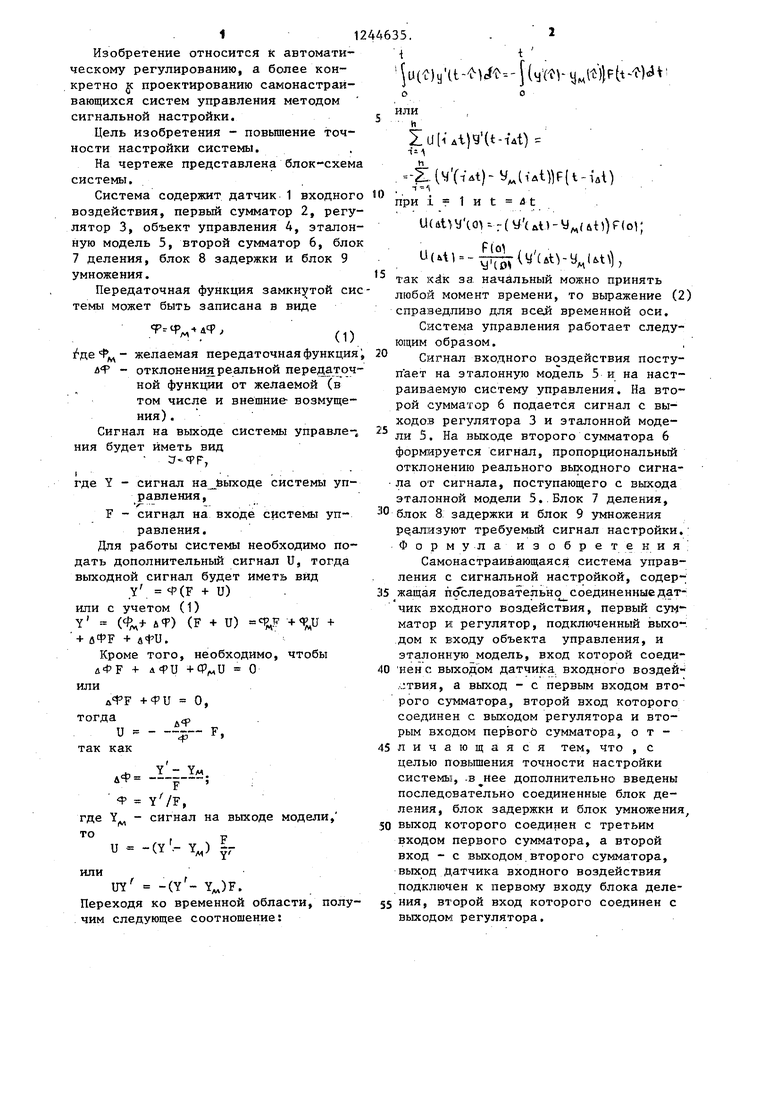
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1109713A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1153314A1 |

Изобретение относится к области Самонастраивающихся систем с сигнальной настройкой. Целью изобретения является повышение точности настройки системы. Поставленная цель достигается тем, что последовательно с эталонной моделью подключен второй сумматор второй вход которого подключен к выходу регулятора, а выход сумматора соединен с блоком управления, состоящего из последовательно соединенных блока деления, блока задержки и блока .умножения. 1 ил. (f 4iak 4 Od 09 C71
| Борцов Ю.А., Поляков Н.Д | |||
| Применение стационарных дина ических наблюдателей в адаптивньрс электромеханических системах с эталонной моделью.- В сб.: Автоматизация производства | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - Romano М., De Santis, Jean Conan | |||
| Practical Sentivity reduction test .application to power System,- Jnternational Journal of System Science, 1977, № 9, pp | |||
| СПОСОБ РАДИО - СНОШЕНИЙ | 1924 |
|
SU1067A1 |
