(54) АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1981 |
|
SU940131A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| Адаптивный регулятор | 1989 |
|
SU1675845A1 |
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| СИСТЕМА ПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2367991C2 |
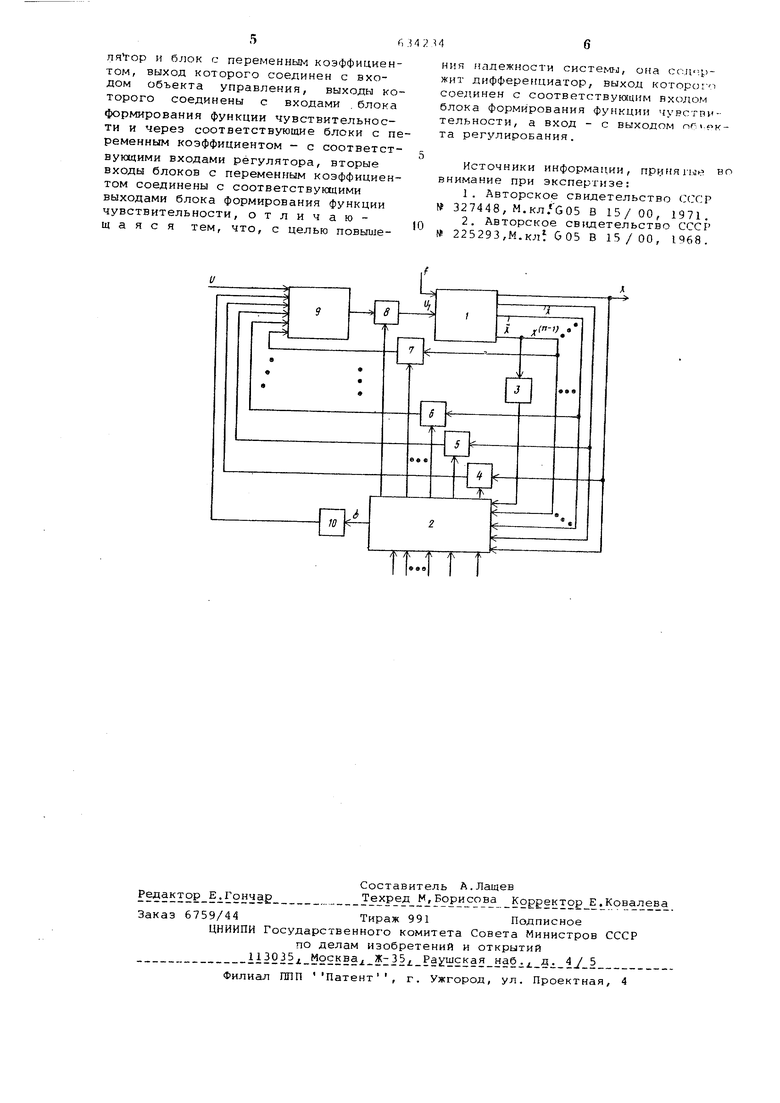
Изобретение относится к автоматике и может быть использовано в систе мах управления любого назначения, в частности в самонастраивающихся системах управления технологическими процессами, в автоматических системах оптимизации. Известна адаптивная система управ ления, содержащая регулятор с подстраиваемым коэффициентом передачи, объект управления, модель, устройств сравнения, квадратичный детектор и фильтр коррекции, образующий вместе с детектором формирователь сигнала чувствительности ошибки рассогласования модели и объекта управления к настраиваемому параметру регулятора l . Малая надежность свойственна этой системе управления. Наиболее близким по технической сущности к изобретению является вариант реализации системы самонастрой ки, которая содержит последовательно соединенные блок формирования функции чувствительности, исполнительный механизм, регулятор и блок с переменным коэффициентом, выход которо го соединен с входом объекта управле ния, выходы которого соединены с вхо дами блока формирования функции чувст вительности и через соответствующие блоки с переменным коэффициентом с соответствующими входами регулятора, вторые входы блоков с переменным коэффициентом соединены с соответствуивдими выходами блока формирования функции чувствительности 2 . Однако эта система имеет малую надежность. Цель изобретения - повышение надежности . Достигается это тем, что система содержит дифференциатор, выход которого соединен с соответствующим входом блока формирования функции чувствительности, а-вход - с выходом объекта регулирования. На чертеже дана функциональная схема адаптивной системы управления. Сигналы с выходов объекта управления 1 подаются на входы блока 2 формирования функций чувствительности, причем а -ая производная выходного сигнала измеряется дифференциатором 3, зходом которого является сигнал И -1 производной объекта управления, вторалми входами блока 2 формирования функций чувствительности служат уставки желаемых динамических параметров объекта. Соответствующие выходные сигналы формирователя функций чувствителр-ичостл :; /т на блоки 4-8 с перемеьшым коэффициентом регулятора 9/ стоящие в колчтурах обратных связей и в выходной цепи регулятора.. Кэнтур сигнальной настройки образуется исполнительным механизмом 10, представ/гяющимсобой генератор, включенный мехщу одним из выходов блоком 2 формирования функций чувствительности и входом регулятора 9, на который гак же поступает задающего воздействия TI . Сигнальное возмущение f , как это показано приведено по входу объекта 1, где i - постоян ная илн слабо меняющаяся неопределен ная величина. Адаптивная система управления работает следующим образом. Задающее воздействие И подается на вход регулятора 9, который, с учетом подстраиваемых коэффициентов блоков 4-8 в входных и выходной цепях, описывается равенством ,(u-T), далее управляющее воздействие через блок 8 с переменным коэффициентом подается на вход объекта управления 1, описываемого линейным стационар ным дифференциальным управлением 1а„ ,.), i на вход которого так же действует сигнальное возмущение. Динамические коэффициенты объекта управления а-,,Ъ,а также i являются постоянными неизвестными величинами, а коэффицие тыК@,, а так же сигнал Р есть под страиваемые аналоги коэффициентов б ков 4-8 и сигнала с исполнительного механизма. 10. Выходные сигналы объ та управления 1, представляющие собой значения х и всех его производны до tt - 1 порядка вместе с И -ой про воднойр измеряемой дифференциатором 3, поступают на первые входы блока формирования функций чувствительнос который формирует сигналы параметри ческой и сигнальной подстройки по з конам (П) Д М (n-i) тгМ-гт -л i +1 а -к Ъ и.Т. - йъ ЙР -R .Г, SiKb положительные коэффициенты, уставки желаемых динамическ параметров объекта управления, опре ляемые из уравнения желаемого движе ния П1 . М н.. 4-J. а Значение параметров а.,,В занося ся в блок формирования функций чув пительности 2. Исполнительный мехаизм 10 реализует закон сигнальной одстройки: 2SVB r OУказанные правила есть результат еализации подстройки по градиенту ритерия и 6 от настраиваемых араметров и сигнала с соответствущими коэффициентами пропорциональости . Учитываемая работа адаптивной истемы управления легко проверяется з следующих соотношений Перепишем равнение объекта 1 в ином виде и права прибавим тождественное равентво регулятора j j «n-n n-4)(U,.f). (11-Г). -R; UO осле очевидных преобразований полу-. .ia«,x (П-.) „М, Б и-(Я,.Д;)х f i + (B--R lUjtb -BP. учетом того, что система стациоарна, а следовательно Д4 ,, b ,i - посоянны, после умножения левой и праой части на б получим Hb--Rb)6V()6, учетом принятых законов подстройи, последнее перепишется в виде lo Sili i-unT nSbtb- lT b + (Ь1-БР)ВГ, что эквивалентно, в силу стационар{ТО эквивалентно, юсти процессов, Е ности процессов, выражению (.-.1(r) 11-1 -2,/. fh-l Vb Т 4. fbi -n«t.fui ьИ )- Ук1Ь1-Б Pj(bf-B Р). Если выбирать функцию Ляпунова в виде r7-i (()( ToV -6, что указывает на достаточные условия устойчивости адаптивной системы управления согласно второго метода Ляпунова. Предлагаемая адаптивная система управления выгодно отличается от прототипа тем, что реализует те же функции при меньших аппаратурных затратах, при этом надежность указанной cиcтe 4ы возрастают и исключается необходимостью точной настройки модели. Формула изобретения Длаптивная система управления, содержащая последовательно соединенные блок формирования функции чувствительности, исполнительный механизм, регуля 1Ор н блок с переменным коэффициентом, выход которого соединен с входом объекта управления, выходы которого соединены с входами ,блока формирования функции чувствительности и через соответствуюйше блоки с переменным коэффициентом - с соответствующими входами регулятора, вторые входы блоков с переменным коэффициентом соединены с соответствующими выходами блока формирования функции чувствительности, отличающаяся тем, что, с целью повышеиня (ллежности систем}), oFfa cc:,,iжит дифференциатор, выход которог соединен с соответствующим входом блока формирования функции чувстпительности, а вход - с выходом оСркта регулирования.
Источники информации, npyFiHiue во внимание при экспертизе:
||.4 I
