Изобретение относится к электротехнике и может быть использовано в электроприводе для прецизионного управления положением и скоростью вращения механического объекта.
Цель изобретения - повышение точности регулирования скорости.
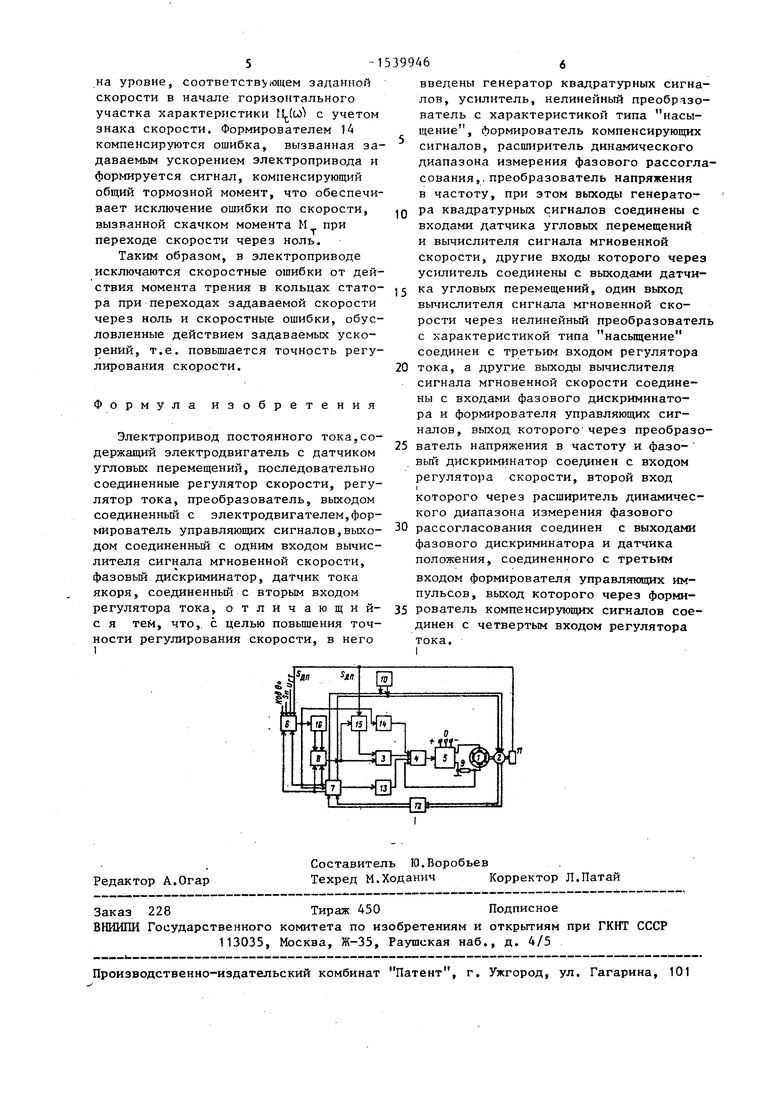
На чертеже приведена схема электропривода.
Электропривод постоянного тока содержит двигатель 1 с датчиком 2 угловых перемещений, последовательно соединенные регулятор 3 скорости, регулятор 4 тока, преобразователь 5, выходом соединенный с двигателем 1, фор-
мирователь 6 управляющих сигналов,выходом соединенный с одним входом вычислителя 7 сигнала мгновенной скорости, фазовый дискриминатор 8, датчик 9 тока, соединенный с вторым входом регулятора 4 тока, датчик 10 положения, генератор 11 квадратурных сигналов, усилитель 12, нелинейный преобразователь 13, формирователь 14 компенсирующих сигналов, расширитель 15 динамического диапазона измерения фазового рассогласования и преобразователь 16 напряжения в частоту. Выходы генератора 11 квадратурных сигналов соединены с входами датчика 2 угловых
сл оо
СО
со
Јь
с&
перемещений и вычислителя 7 сигнала мгновенной скорости, другие входы которого через усилитель 12 соединены с выходами датчика 2 угловых перемещений. Один выход вычислителя 7 сигнала мгновенной скорости через нелинейный преобразователь 13 с характеристикой типа насыщение соединен с третьим входом регулятора 4 тока, а другие выходы вычислителя 7 сигнала мгновенной скорости соединены с входами фазового дискриминатора 8 и формирователя 6 управляющих сигналов, выход которого через преобразователь 16 напряжения в частоту и фазовый дискриминатор 8 соединен с вхо- дом регулятора 3 скорости, второй вход которого через расширитель 15 динамического диапазона измерения фазового рассогласования соединен с выходами фазового дискриминатора 8 и датчика 10 положения, соединенного с третьим входом формирователя 6 управляющих импульсов, выход которого через формиро ватель 14 компенсирующих сигналов соединен с четвертым входом регулятора 4 тока.
Датчик 2 угловых перемещений (ин- дуктосин), возбуждаемый генератором 11, усилитель 12, вычислитель 7,нелинейный преобразователь 13, контур регулирования тока якоря двигателя образуют нелинейный контур компенсации момента трения, в подшипниках.
Фазовый контур регулирования скорости состоит из датчика 2, усилителя 12, вычислителя 7, фазового дискриминатора 8, расширителя 15, регулятора 3 скорости, контура регулиро- вания тока и преобразователя 16.
Датчик 2 представляет собой,например, индуктосин, содержащий две сдвинутые на 90 эл. град, обмотки статора и точно такие же две обмотки ро- тора.
Формирователь 6 управляющих сигна- лов формирует сигналы для режима позиционирования и для режима отслеживания заданной скорости.
Датчик 10 вырабатывает импульсный сигнал при прохождении валом определенного положения для коррекции начального положения вала объекта.
Усилитель 12 осуществляет усиление И коррекцию амплитуд сигналов датчи- ка 2. Это позволяет полностью компенсировать изменение амплитуды сигнала датчика 2 при изменении скорости вра
„
,
L
5
0
щения ротора датчика 2 относительно вращающегося поля статора.
Нелинейный преобразователь 13 имеет характеристику с наклоном,обратным наклону начального участка характеристики момента трения в подшипниках, и преобразует сигнал по скорости в сигнал нелинейной обработкой связи по скорости.
Формирователь 14 компенсирующих сигналов обеспечивает линейную и дифференцирующую связи для компенсации соответственно тормозящего момента на валу двигателя и ошибки, обусловленный задаваемым ускорением.
Расширитель 15 динамического диапазона измерения фазового рассогласования выполнен цифроаналоговым и предназначен для расширения области линейного участка измерителя фазового рассогласования.
Электропривод работает следующим образом.
На первом этапе (на этапе позиционирования) в соответствии с поступившим кодом требуемого углового положения объекта 90 и кодом действительного положения объекта (формируемым в результате накопления информации о перемещении объекта) по сигналу пуска Sn формирователем 6 управляющих сигналов вырабатывается треугольное управляющее напряжение, обеспечивающее (при принятом значении ускорении или торможения) переход объекта из исходного положения Qu в требуемое
И
положение 9й . На втором этапе (после окончания режима позиционирования) к входу преобразователя 16 напряжения в частоту вращения вектора подключается напряжение U , преобразуемое в пропорциональное этому напряжению значение скорости вращения вала объекта. При малых скоростях, т.е. при малых значениях напряжения UrT(соответствующих участку с отрицательным наклоном характеристики момента трения в подшипниках Мс(со)действует контур нелинейной обратной связи по скорости, формирующий составляющую тормозного момента. При выходе на горизонтальный участок характеристики Mc(tO) (при достижении определенного значения задающей частоты) в вычислителе 7 сигнала мгновенной скорости сигналом задающей частоты осуществляются переключения, результатом которых является фиксация напряжения вычислителя 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электроприводом | 1979 |
|
SU824135A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Электропривод | 1979 |
|
SU875566A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
| Электропривод | 1983 |
|
SU1179511A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
Изобретение относится к электротехнике и может быть использовано в электроприводе для прецизионного управления положением и скоростью вращения механического объекта. Целью изобретения является повышение точности регулирования скорости. Нелинейный скоростной контур компенсирует отрицательный наклон начального участка характеристики момента трения в подшипниках. В электропривод введен также формирователь компенсирующих сигналов, обеспечивающий линейную и дифференцирующую связи для компенсации соответственно тормозного момента на валу двигателя и ошибки, обусловленной задаваемым ускорением. Таким образом, в электроприводе устраняются скоростные ошибки от действия момента трения в кольцах статора при переходах задаваемой скорости через ноль и скоростные ошибки, обусловленные действием задаваемых ускорений, т.е. повышается точность регулирования. 1 ил.
| Устройство для согласования угловогопОлОжЕНия СиНХРОННО ВРАщАющиХСяВАлОВ элЕКТРОдВигАТЕлЕй | 1979 |
|
SU834822A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982., с | |||
| ПЕЧНОЙ ЖЕЛЕЗНЫЙ РУКАВ (ТРУБА) | 1920 |
|
SU199A1 |
