Изобретение относится к оборудованию ленточных конвейеров, а именно к устройствам для улавливания ленты конвейера в случае ее обрыва на наклонных конвейерах.
Известно устройство для улавливания ленты конвейера в случае ее обрыва, содержащее шярнирно закрепленный на раме эксцентриковый зажимной элемент, расположенный над лентой и имеющий опорный ролик, опирающийся на ленту, под которой на раме закреплена опорная площадка 1.
Однако конвейерная лента прижимается только к боковой кромке и контакт прижимного устройства с лентой происходит на сравнительно малом участке, а так как при заклинивании ленты возникают резкие ударные нагрузки, то возможны новые разрывы ленты. Устройство срабатывает при реверсе направления движения ленты и поэтому улавливает только грузовую ветвь и не могут быть применены для улавливания холостой ветви, которая не меняет своего направления движения в случае обрыва ленты.
Все это ограничивает область применения этого устройства.
Наиболее близким техническим рещением к предлагаемому является устройство для улавливания ленты конвейера в случае ее обрыва, включающее расположенные под холостой и грузонесущей ветвями ленты опоры, а над ними установленные осями на раме рамки с закрепленными на одних их концах зажимными роликами, плуг и стопорный механизм, связанный с датчиком обрыва ленты.
При этом плуг закреплен на расположенной над грузонесущей ветвью ленты рамке, которая канатом соединена с рамкой для зажатия холостой ветви ленты и с приводом 2.
Однако наличие привода приводит к усложнению конструкции, а крепление плуга на рамке зажимного ролика снижает время зажатия ленты, поскольку плуг располагается наклонно по ходу движения ленты, в результате чего расположенный на ленте материал будет отжимать плуг, а следовательно, и рамку с зажимным роликом.
Кроме того, прижимаемый плугом материал к ленте будет разрушать ее.
Целью изобретения является повышение эффективности в работе устройства путем снижения времени его срабатывания.
Указанная цель достигается тем, что устройство для улавливания ленты конвейера в случае ее обрыва, включающее расположенные под холостой и грузонесущей ветвями ленты опоры, а над ними установленные осями на раме рамки с закрепленными на одних их концах зажимными роликами, плуг и стопорный механизм, связанный с датчиком обрыва ленты, снабжено установленными на оси рамки, расположенной
над грузонесущей ветвью ленты, боковинами с закрепленным на одних их концах плугом, а другие концы выполнены с возможностью взаимодействия со свободным концом рамки, расположенной над грузонесущей ветвью ленты, и соединения со стопорным механизмом и при помощи тяг со свободным концом рамки, расположенной над холостой ветвью ленты, при этом рама имеет фиксаторы, закрепленные с возможностью взаимодействия с расположенной над грузонесущей ветвью ленты рамкой, свободный конец которой выполнен отогнутым вверх.
На фиг. 1 изображено устройство для
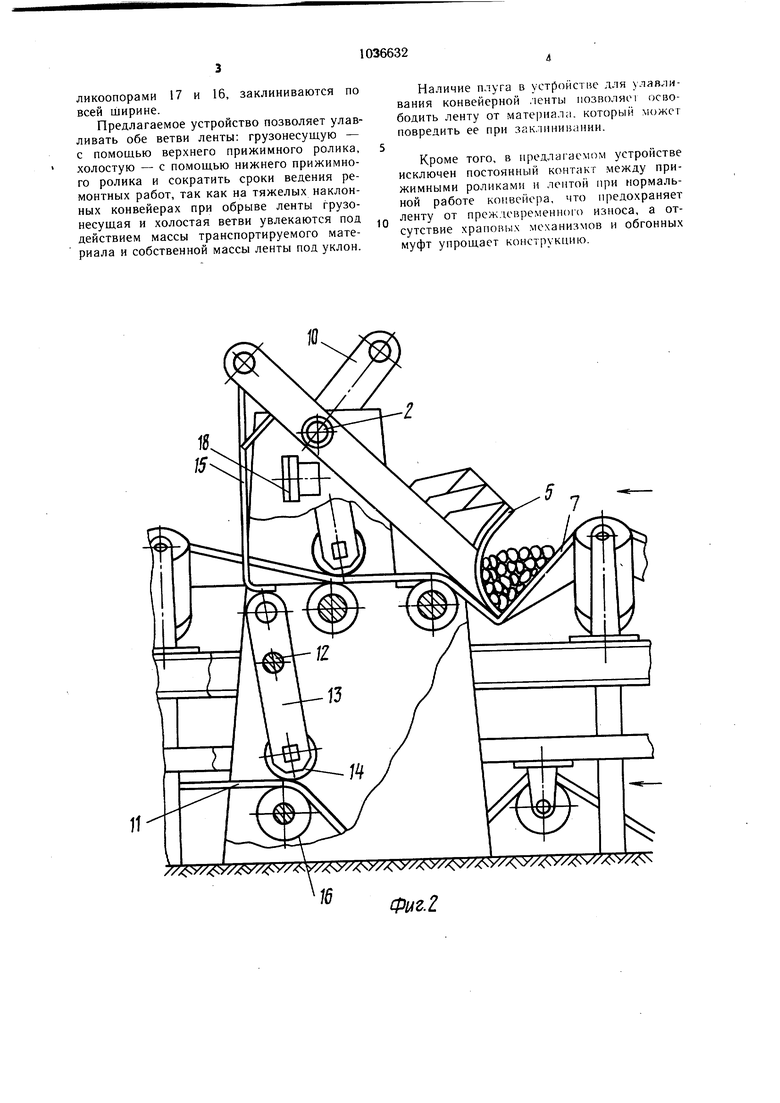
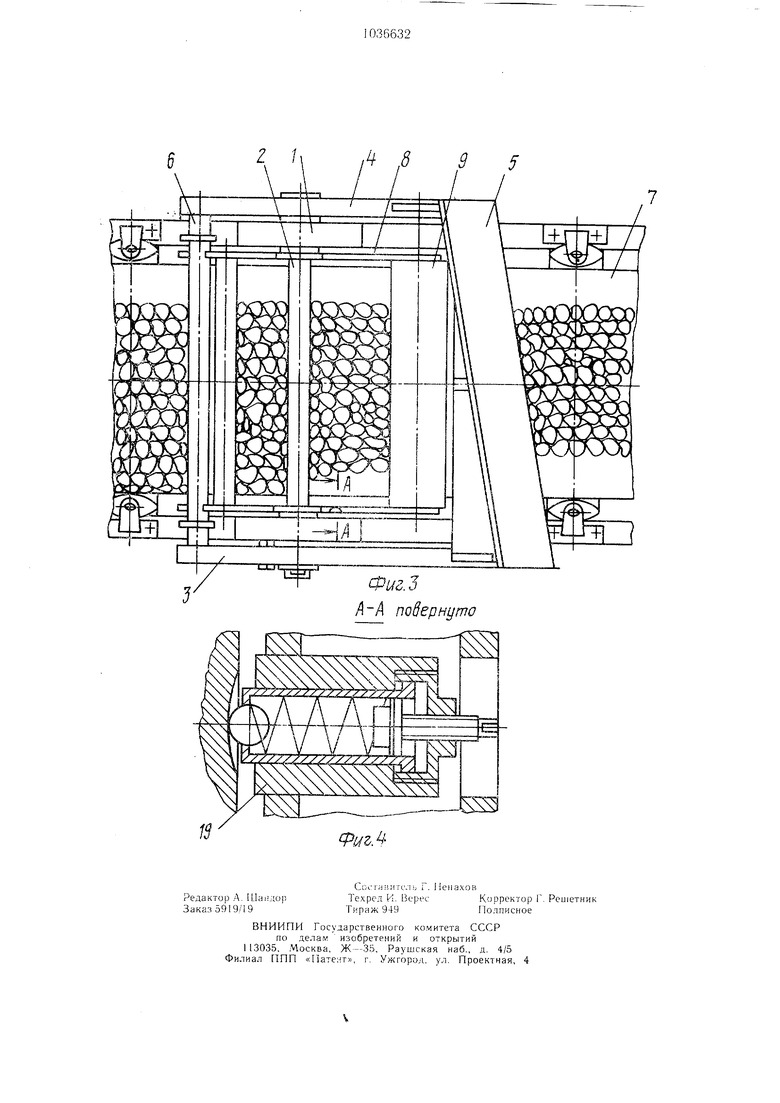
5 улавливания ленты конвейера в случае ее обрыва, нерабочее положение; на фиг. 2 - то же, при обрыве ленты; на фиг. 3 - устройство, вид сверху; на фиг. 4 - разрез А-А на фиг. 3.
Устройство для улавливания ленты конвейера в случае ее обрыва содержит шарнирно установленные на раме 1 осью 2 боковины 3 и 4, на одних концах которых закреплен плуг 5, а другие концы соединены стержнем 6. На оси 2 щарнирно установлена расположенная над грузонесущей ветвью 7 рамка 8 с закрепленным на одном конце зажимным роликом 9, а другой свободный конец 10 выполнен отогнутым вверх.
Над холостой ветвью 11 ленты на оси 12
0 установлена рамка 13 с зажимным роликом 14 на одном конце, а другой свободный конец рамки тягой 15 соединен с концами боковин 3 и 4. Под холостой 11 и грузонесущей 7 ветвями ленты на раме установлены опоры 15 в виде роликоопор 16
5 и 17.
Концы боковин расположены с возможностью соединения их сто стопорны.м механизмом, выполненным в виде электромагнита 18, связанного с датчиком обрыва ленты.
На раме 1 закреплены фиксаторы 19 с возможностью взаи.модействия с рамкой 8. Рамка 13 также связана с рамой 1 фиксатором.
5 При обрыве ленты по сигналу датчика замыкается электрическая цепь электромагнита 18 и освобождаются боковины с плугом 5. Поворачиваясь вокруг оси 2 плуг 5 под собственным весом ложится на ленту и очищает ее от материала. Тяга 15 поднимается вверх и освобождает рамку 13, которая поворачивается вокруг оси 12 цилиндрическим роликом 14 и ложится на холостую ветвь ленты. Одновременно стержень 6, нажимая на отогнутый верх конец рамки 8, также освобождает ее от фиксатора и рамок 9, поворачиваясь вокруг оси 2, и ложится на очищенную грузонесущую ветвь ленты. При этом ветви ленты, попадая между роликами 9 и 14 и цилиндрическими роликоопорами 17 и 16, заклиниваются по всей ширине.
Предлагаемое устройство позволяет улавливать обе ветви ленты: грузонесущую - с помощью верхнего прижимного ролика, холостую - с помощью нижнего прижимного ролика и сократить сроки ведения ремонтных работ, так как на тяжелых наклонных конвейерах при обрыве ленты грузонесущая и холостая ветви увлекаются под действием массы транспортируемого материала и собственной массы ленты под уклон.
Наличие плуга в устройстве для улавливания конвейерной .ченты позволяс освободить ленту от материала, который может повредить ее при заклинивании.
Кроме того, в предлагаемом устройстве исключен постоянный контакт между прижимными роликами и лептой при нормальной работе коивейера, что предохраняет ленту от преждевременно1-о износа, а отсутствие храповых механизмов и обгонных муфт упрощает конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для улавливания конвейерной ленты | 1980 |
|
SU901186A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279390C1 |
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1987 |
|
SU1467005A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2408519C2 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2005 |
|
RU2279392C1 |
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1988 |
|
SU1590423A1 |
| ЛОВИТЕЛЬ ЛЕНТЫ КОНВЕЙЕРА | 1991 |
|
RU2030345C1 |
| БРЕМСБЕРГОВЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2281899C1 |
| БРЕМСБЕРГОВЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279387C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ЛЕНТЫ КОНВЕЙЕРА В СЛУЧАЕ ЕЕ ОБРЫВА, включающее расположенные под холостой и грузонесущей ветвями ленты опоры, а над ними установленные осями на раме рамки с закрепленными на одних их 16 /Ф(г. 1 концах зажимными роликами, плуг и стопорный механизм, связанный с датчиком обрыва ленты, отличающееся тем, что, с целью повышения эффективности в работе путем снижения времени его срабатывания, оно снабжено установленными на оси рамки, расположенной над грузонесущей ветвью ленты, боковинами с закрепленным на одних их концах плугом, а другие концы выполнены с возможностью взаимодействия со свободным концом рамки, расположенной над грузонесущей ветвью ленты, и соединения со стопорным механизмом и при помощи тяг со свободным концом рамки, расположенной над холостой ветвью ленты, при этом рама имеет фиксаторы, закрепленные с возможностью взаимодействия с расположенной над грузонесущей ветвью ленты рамкой, свободный конец которой выполнен отогнутым вверх.
//xS Sy C VX6VXAVC / O X Ф1лг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Регулятор скорости фильтрации жидкости | 1937 |
|
SU54817A1 |
| Горный компас | 0 |
|
SU81A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
