Изобретение относится к электротехнике и может быть использовано в регулируемом асинхронном электроприводе рбщепромьшшенного назначения.
Цель изобретения - повышение , точности определения координат асинхронного двигателя, а именно модуля потокосцепления ротора и электромагнитного мрмента, в статических и динамических режимах работы.
На фиг.1 изображена функциональ- ная схема устройства для определе- ния координат асинхронного двигателя в регулируемом электроприводеJ на фиг.2 - схема формирователя логических сигналов модуля вектора потекосцепления ротора и момента. Устройство для определения координат асинхронного двигателя 1 (фиг.1) в регулируемом электроприводе содержит датчики 2 фазных токов статора, под1 люченные к входим формирователя 3 сос тавляювдих вектора тока статора, формирователь 4 составляющих вектора потокосцепления ротора, четыре блока 5-8 перемножения и два сумматора 9 и 10, входы первого сумматора 9 подключены к выходам первого 5 и второго 6 блоко перемножения, а входы второго сумматора 10 подключены к выходам третьего 7 и четвертого 8 блоков перемножения. Первые первого и четтзертого 8 блоков перемножения объединены между собой и подключены к первому выходу формирователя 4 составляющих вектора потокосцепления ротора. Первые входы второго 6 и третьего 7 блоков перемножения объединены между собой и подключены к второму выходу формирователя 4 составляющих вектора потокосцеппени ротора.
Кроме того, в устройство введены два фильтра 11 и 12, два элемента 13 и 14 сравнения, два релейных элемента 15 и 16 и формирователь 17 логических сигналов модуля вектора потокосцепления ротора и Момента, первый выход которого подключен к объединенным между собой вторым входам первого 5 и третьего 7 блоков перемножения, а второй выход - к объединенным между собой втбрым входам второго 6 и четвертого 8 блоков перемножения. При этом выходы первого 9 и второго 10 сумматоров подключены к первым входам первого 13 и второго 14 элементов сравнения, вторые входы которых подключены к соответствующим выходам формирователя
3 составляющих вектора тока статора, а выходы первого 13 и второго 14 элементов сравнения соединены соответственно с входами первого и второго релейных элементов 15 и 16,подкпюченных выходами к первой паре входов формирователя 17 логических сигналов модуля вектора потокосцепления ротора и момента, вторая пара входов которого соединена с соответствующими выходами формирователя 4 составляющих вектора потокосцепления ротора.
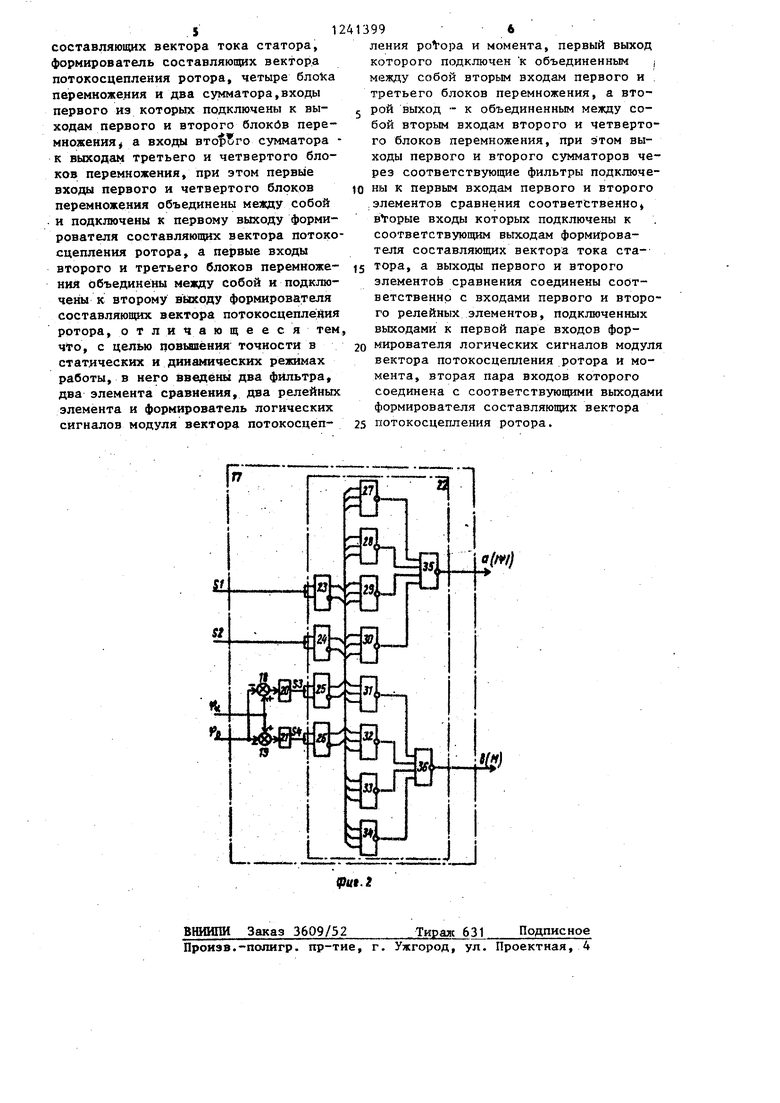
Формирователь 17 логических сигналов модуля вектора потокосцепения ротора и момента содержит третий 18 и четвертый 19 элементы сравнения, третий 20 и четвертый 21 релейные элементы и распределитель 22 импульсных сигналов, вьтолненный на схемах И-НЕ 23-36.
(
Входы каждой из схем И-НЕ 23 и 24 объединены между собой и образуют первую пару входов формирователя 17 логических сигналов модуля вектора потокосцепления ротора и момента. Входы каждой из схем И-НЕ 25 и 26 объединены между собой и подключены к выходам третьего 20 и четвертого 21 релейных элементов, входы которых соединены с выходами третьего 18 и четвертого 19 элементов сравнения. Входы элементов 18 и 19 сравнения попарно объединены между собой и образуют вторую пару входов формирователя 17 логических сигналов модуля вектора потокосцепления ротора и момента. Выходы схем И-НЕ 23-26 подключены к соответствующим входам схем И-НЕ 27-34. Выходы схем И-НЕ 27-30 подключены к входам схемы И-НЕ 35, а выходы схем И-НЕ 31-34 - к входам схемы И-НЕ 36,
;
Входы схем И-НЕ 35 и 36 образуют соответственно первый и второй выходы формирователя 17 логических сиг- н-алов модуля вектора потокосцепления ротора и момента.
Устройство для определения координат асинхронного двигателя в регулируемом электроприводе работает следующим образом.
Формирователь 3 составляющих вектора тока статора и формирователь 4 составляющих вектора потоко- сцепления ротора осуществляют соответственно формирование составляющих обобщенных векторов тока статора Ij, If} и потокосцепления ротора f. , в декартовой системе координат -неподвижной относительно статора асинхронного двигателя 1.
Устройство представляет собой замкнутый контур регулирования, в котором задающей величиной являются вектор тока статора, представленный в виде проекций на неподвижные оси об.
С помощью блоков 5-8 перемножения, сумматоров 9 и 10 выполняются следующие операции: ,
Ч % -f аЬ.
где I, восстановленные составляющие вектора тока статора, ft & - логические сигналы,
поступающие с выходов формирователя. 17 логических сигналов. Проходя через фильтры 11 и 12, сигналы у, Ij5 поступают на первые входы элементов 13 и 14 сравнения, где сравниваются с текущими значениями составляющих вектора тока статора lot, Ь,, поступающими с выходов формирователя 3. Сигналы ошибок на выходах элементов 1.3 и 14 сравнения
ЛЬС 1$:,. ..Д1 Iji - 1
подаются на входы релейных элементов 15 и 16, на выходе которых формируются сигналы знака ошибок, т.е. sign д ;,, sign д1, совпадающие по знаку с соответствующей ошибкой 41в &1 и постоянные по модулю. Выходны сигналы релейньос элементов 15 и 16 поступают на первую пару входов S1, S2 формирователя 17 логических сигналов, на вторую пару входов ко- торого подаются значения составляющих вектора потокосцепления ротора )if выхода формирователя 4.
Формирователь 17 логических сиг- налов обеспечивает отрицательную обратную связь в контуре регулирования тока статора при всех возможных сос
2413994
тояниях векторов асинхронного двигателя- 1, в частности векторов тока статора и потокосцепления ротора.Использование в устройстве релейных 5 элементов 15 и 16 позволяет рассматривать его как систему управления с переменной структурой. При этом возникают так называемые скользящие режимы, при которых величины оши- 10 бок Л1о., Д1 стремятся к нулю.
На выходе формирователя 17 логических сигналов формируются такие импульсные сигналы Я. /6 что средние их значения определяют соответствен- 15 но модуль вектора потокосцепления ротора и вектор электромагнитного момента М, т.е.
г
fe .L .„ Itl
25
Частота, переключений в скользящих режимах релейных элентов 15 и 16 составляет 50-100 кГц, благодаря чему формирование импульсньпс сигналов т.е. модуля вектора потоко- сцепления ротора и электромагнит0 ного момента М, осуществляется с высокой точностью.
Таким образом, введение в предлагаемое устройство для определе- . кия координат асинхронного двига5 теля в регулируемом электроприводе двух фильтров, двух элементов сравнения, двух релейных элементов и формирователя логических сигналов модуля вектора потоКосцепления ро0 тора и момента позволяет реализовать замкнутую подс истему регулирования вектора тока статора, работающую в скользящем режиме с высокой частотой переключения, что опред еляет
5 более высокую точность формирования выходных координат асинхронного двигателя, т.е. модуля вектора пото- косцепления ротора и электромагнитного момента, по сравнению с извест- 0 ным устройством.
-.- Ф ормула изобретения
Устройство для определения координат асинхронного двигателя в регулируемом электроприводе, содержащее датчики фазных токов статора, подключенные к входам формирователя
составляю1цих вектора тока статора, формирователь составляющих вектора потокосцеплеиия ротора, четыре бло1са перемножения и два сумматора,входы первого из которьгх подключены к выходам первого и второго блокдв перемножения а входы сумматора к выходам третьего и четвертого блоков перемножения, при этом первые входы первого и четвертого блоков перемножения объединены между собой и подключены к первому выходу формирователя составляющих вектора потоко сцепления ротора, а первые входы второго и третьего блоков перемножений объединены между собой и подключены к второму выходу формирователя составляющих вектора потокосцепле;йия ротора, отличающееся тем что, с целью повьваёння точности в статяческих и динамических режимах работы, в него введены два фильтра, два элемента сравнения, два релейных элемента и формирователь логических сигналов модуля вектора потокосдепения ротора и момента, первый выход которого подключен к объединенным , ежду собой вторым входам первого и третьего блоков перемножения, а второй выход - к обтзединенным между собой вторым входам второго и четвертого блоков перемножения, при этом выходы первого и второго сумматоров через соответствующие фильтры подключены к первым входам первого и второго элементов сравнения соответственно в горые входы которых подключены к соответствующим выходам формирователя составляющих вектора тока статора, а выходы первого и второго элементов сравнения соединены соответственно с входами первого и второго релейных элементов, подключенных выходами к первой паре входов формирователя логических сигналов модуля вектора потокосцепления ротора и момента, вторая пара входов которого соединена с соответствующими вькодами формирователя составляющих вектора
потокосцепления ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1984 |
|
SU1246317A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1987 |
|
SU1415398A1 |
| Устройство для определения координат асинхронного двигателя регулируемого электропривода | 1986 |
|
SU1403323A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1398061A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1399882A1 |
| Частотно-регулируемый асинхронный электропривод | 1984 |
|
SU1184064A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
Изобретение относится к электротехнике и может быть использовано в регулируемом асинхронном элек троприводе. Цель изобретения - по- вьшение точности определения координат асинхронного двигателя (АД), а именно модуля потокосцепления ротора и электромагнитного момента в статических и динамических режимах. Устройство содержит АД 1, датчик фазных токов 2 статора, формирователь составляюощх вектора тока статора 3, формирователь составляющих вектора потокосцепления ротора 4, блоки перемножения 5-8, сумматоры 9,10. Введение фильтров 11,12, элементов сравнения 13,14, релейных элементов 15,16 и формирователей логических сигналов модуля вектора потокосцепления ротора и момента 17 позволяет реализовать замкнутую подсистему регулирования вектора тока статора, работающую в скользящем режиме с высокой частотой переключения. Подключение указанных элементов определяет более высокую точность формирования выходных координат АД, т.е. модуля вектора потокосцепления ротора и электромагнитного момента. 2 ил. С (Л io 4 О9 СО ;о а 
ВНИШШ Заказ 3609/52
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Тиралс 631
Подписное
| Гусяцкий Ю.М | |||
| Синтез быстродействующей системы частотно-управляемого асинхронного электропривода | |||
| - Электричество,1982,№ 10, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| А | |||
| Plun Kett Direct flux and torgue regulation in РШ inverter - induction motor drive, IEEE Trans, on | |||
| ind | |||
| appl | |||
| vol | |||
| Насос | 1917 |
|
SU13A1 |
| Способ подпочвенного орошения с применением труб | 1921 |
|
SU139A1 |
| . | |||
