Изобретение относится к конвейеростроению, а именно к устройствам для перегрузки подвесок подвесного конвейера с одного пути на другой, и может быть использовано в любой отрасли промышленности, где по технологии необходима перегрузка подвесок.
Известно устройство для перегрузки с одного пути конвейера на другой, включающее силовой цилиндр, шток которого соединен с рычагом, снабженным упором с роликом, перемещающимся по копиру, выполненному в виде паза на поверхности цилиндра .
Недостатком известного устройства является большая зона перегрузки подвесок.
Наиболее близким из известных является устройство для перегрузки подвесок подвесного конвейера с одного пути на другой, включающее установленную на направляющих перегрузочную приводную тележк}, на раме которой установлены захватные крюки 2.
Недостатком известного устройства является то, что механизм перемещения тележки не обеспечивает ее строгой фиксации, а следовательно, устройство не обеспечивает перегрузки подвесок с длинномерными изделиями.
Цель изобретения - перегрузка подвесок с длинномерными изделиями.
Это достигается тем, что перегрузочная тележка имеет механизм шагового перемещения, захватные крюки шарнирно установлены на тележке и соединены с приводом их поворота посредством рычага, а направляющие перегрузочной тележки выполнены поворотными в вертикальной плоскости от привода, при этом приводы поворота направляющих, захватных крюков и механизма щагового перемещения тележки выполнены в виде пневмоцилиндров.
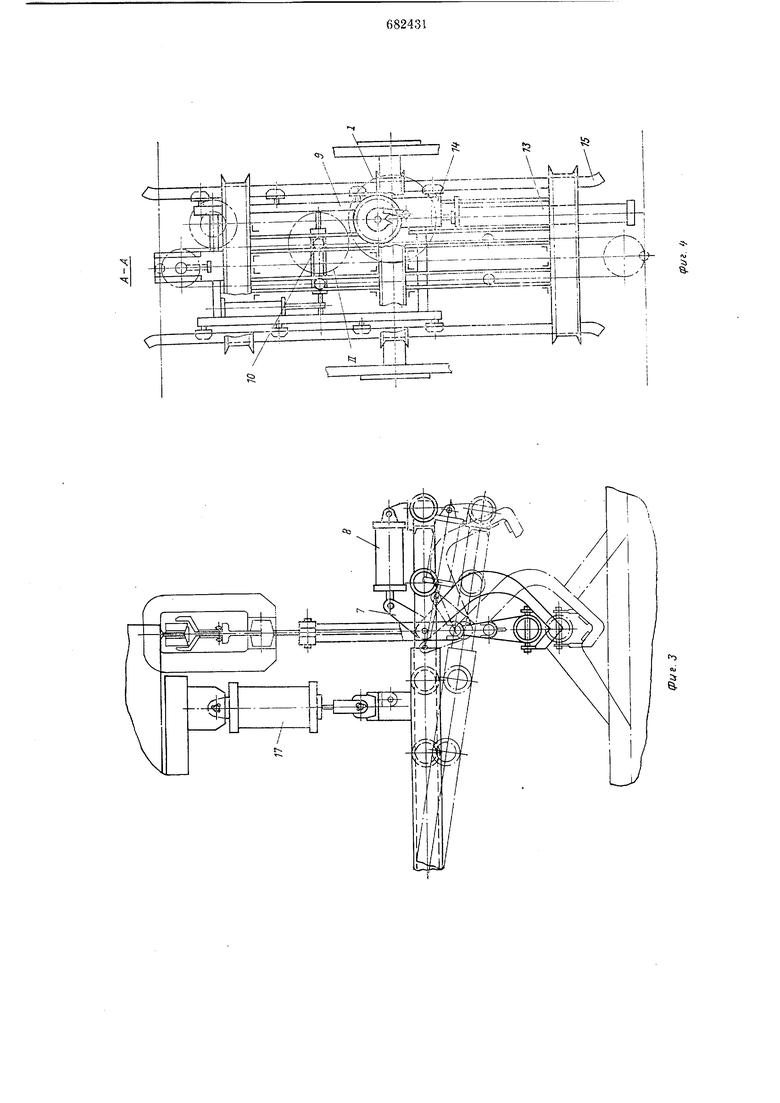
Причем механизм щагового перемещения тележки выполнен из звездочки с храповым колесом, которая установлена на штоке пнсвмоцилиндра, и замкнутой цепи, одно звено которой имеет упор, входящий в паз, выполненный в раме перегрузочной тележки.
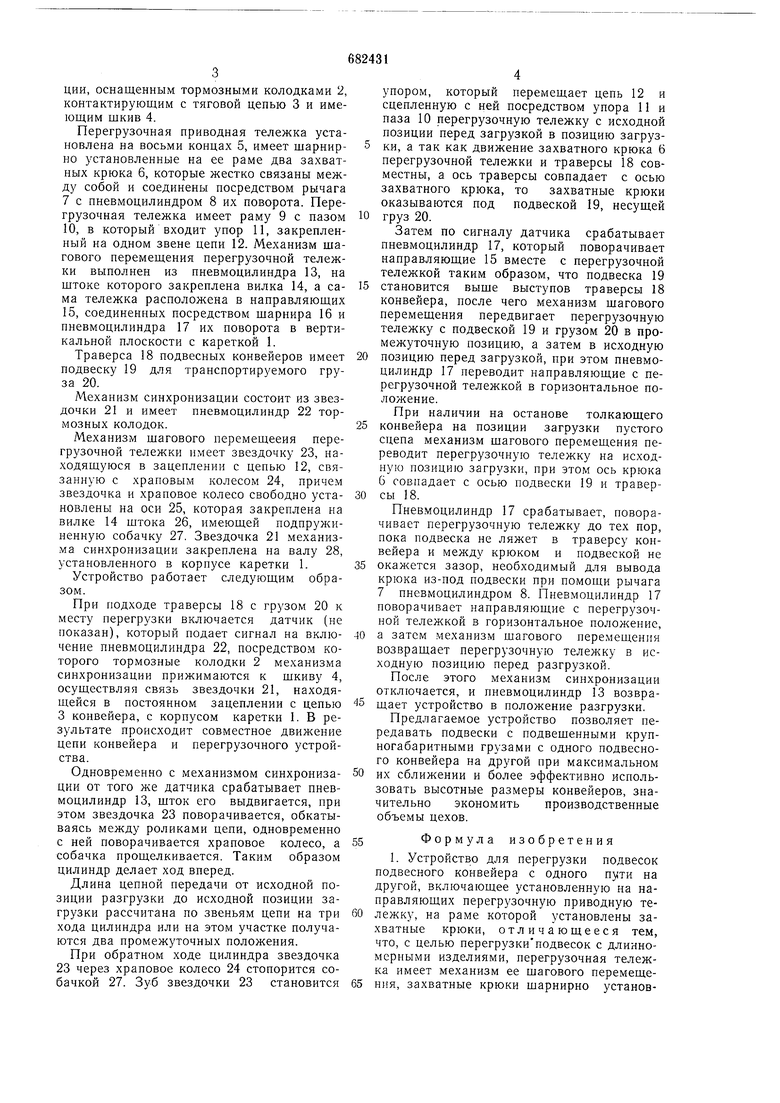
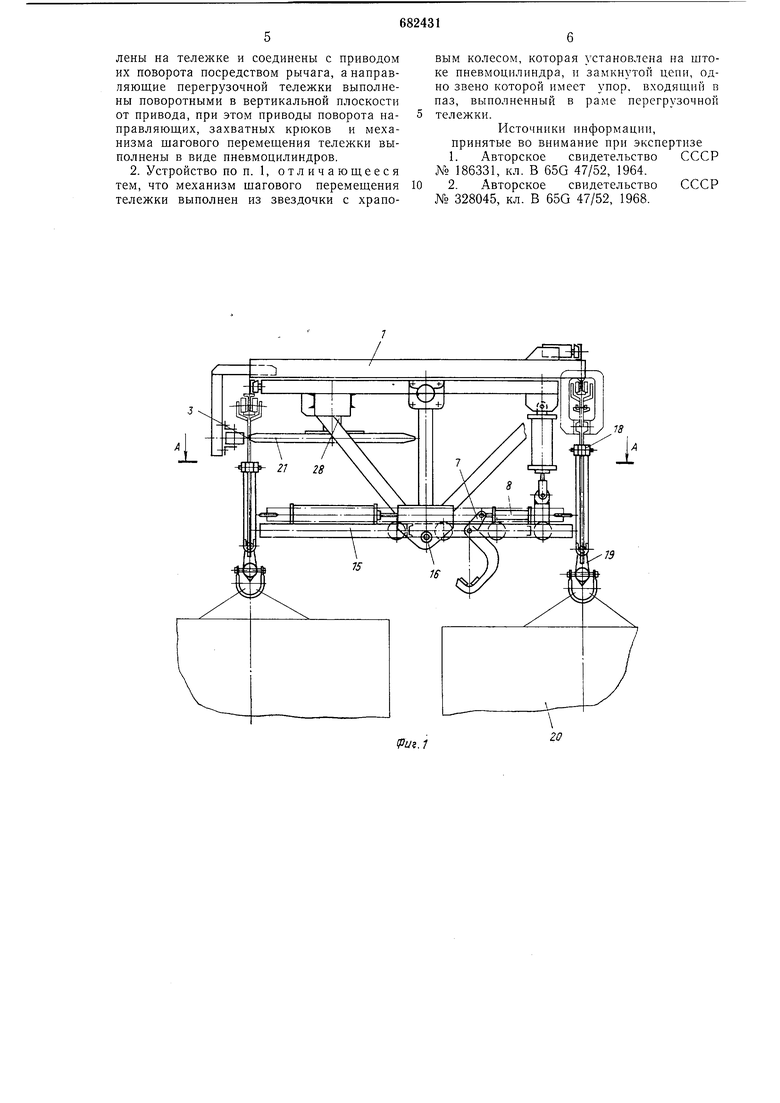
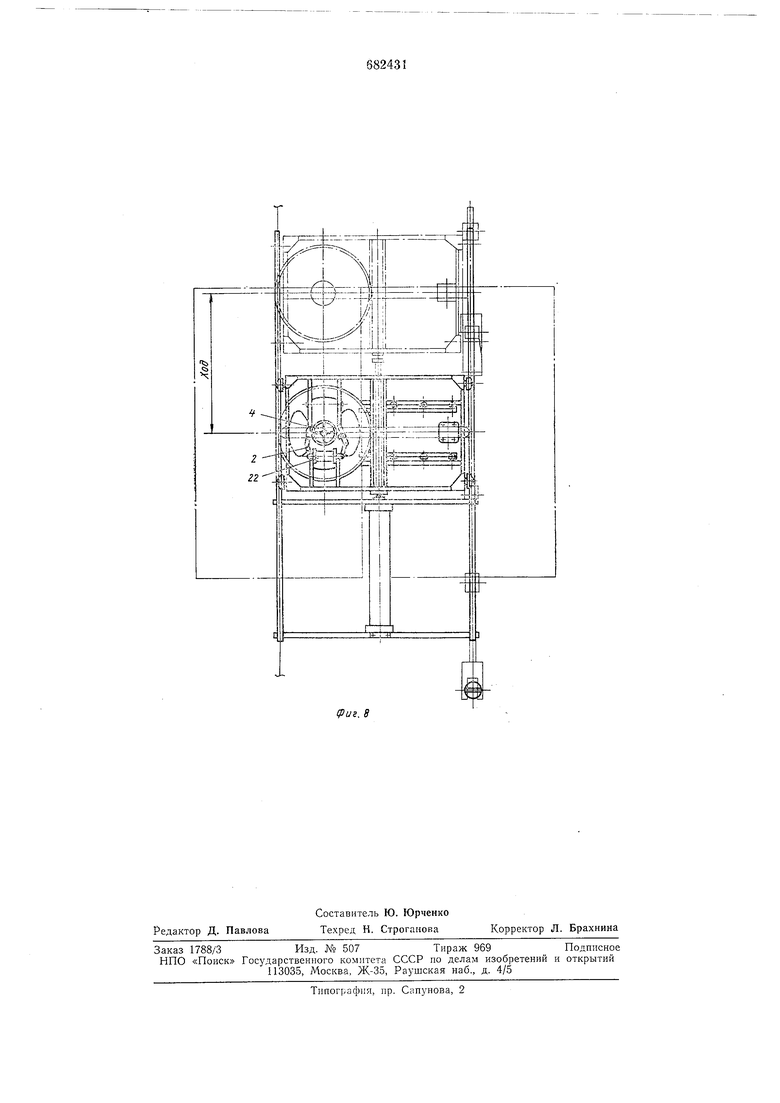
На фиг. 1 показано устройство, вид сбоку; на фиг. 2 показан съем подвески; на фиг. 3 - перевеска подвески на другой конвейер; на фиг. 4 - разрез А-А на фиг. 1; на фиг. 5 - вид по стрелке Б на фиг. 2; на фиг. 6 - узел I на фиг. 4; на фиг. 7 - узел и на фиг. 4; на фиг. 8 - устройство, в плане.
Устройство содержит каретку 1 с расположенным на ней механизмом синхронизации, оснащенным тормозными колодками 2, контактирующим с тяговой цепью 3 и имеющим щкив 4.
Перегрузочная приводная тележка установлена на восьми концах 5, имеет шарнирно установленные на ее раме два захватных крюка 6, которые жестко связаны между собой и соединены посредством рычага 7 с пневмоцилиндром 8 их поворота. Перегрузочная тележка имеет раму 9 с пазом 10, в который входит упор 11, закрепленный на одном звене цепи 12. Механизм шагового перемещения перегрузочной тележки выполнен из пневмоцилиндра 13, на щтоке которого закреплена вилка 14, а сама тележка расположена в направляющих 15, соединенных посредством щарнира 16 и пневмоцилиндра 17 их поворота в вертикальной плоскости с кареткой 1.
Траверса 18 подвесных конвейеров имеет подвеску 19 для транспортируемого груза 20.
Механизм синхронизации состоит из звездочки 21 и имеет пневмоцилиндр 22 тормозных колодок.
Механизм шагового неремещееия перегрузочной тележки имеет звездочку 23, находящуюся в зацеплении с цепью 12, связанную с храповым колесом 24, причем звездочка и храповое колесо свободно установлены на оси 25, которая закреплена на вилке 14 штока 26, имеющей подпружиненную собачку 27. Звездочка 21 механизма синхронизации закреплена на валу 28, установленного в корпусе каретки 1.
Устройство работает следующим образом.
При подходе траверсы 18 с грузом 20 к месту перегрузки включается датчик (не показан), который подает сигнал на включение пневмоцилиндра 22, посредством которого тормозные колодки 2 механизма синхронизации прижимаются к щкиву 4, осуществляя связь звездочки 21, находящейся в постоянном зацеплении с цепью 3 конвейера, с корпусом каретки 1. В результате происходит совместное движение цепи конвейера и перегрузочного устройства.
Одновременно с механизмом синхронизации от того же датчика срабатывает пневмоцилиндр 13, шток его выдвигается, при этом звездочка 23 поворачивается, обкатываясь между роликами цепи, одновременно с ней поворачивается храповое колесо, а собачка прощелкивается. Таким образом цилиндр делает ход вперед.
Длина цепной передачи от исходной позиции разгрузки до исходной позиции загрузки рассчитана по звеньям цепи на три хода цилиндра или на этом участке получаются два промежуточных положения.
При обратном ходе цилиндра звездочка 23 через храповое колесо 24 стопорится собачкой 27. Зуб звездочки 23 становится
упором, который перемещает цепь 12 и сцепленную с ней посредством упора 11 и паза 10 перегрузочную тележку с исходной позиции перед загрузкой в позицию загрузки, а так как движение захватного крюка 6 перегрузочной тележки и траверсы 18 совместны, а ось траверсы совпадает с осью захватного крюка, то захватные крюки оказываются под подвеской 19, несущей
груз 20.
Затем по сигналу датчика срабатывает пневмоцилиндр 17, который поворачивает направляющие 15 вместе с перегрузочной тележкой таким образом, что подвеска 19
становится выще выступов траверсы 18 конвейера, после чего механизм шагового перемещения передвигает перегрузочную тележку с подвеской 19 и грузом 20 в промежуточную позицию, а затем в исходную
позицию перед загрузкой, при этом пневмоцилиндр 17 переводит направляющие с перегрузочной тележкой в горизонтальное положение. При наличии на останове толкающего
конвейера на позиции загрузки пустого сцепа механизм шагового перемещения переводит перегрузочную тележку на исходную позицию загрузки, при этом ось крюка
6совпадает с осью подвески 19 и траверсы 18.
Пневмоцилнндр 17 срабатывает, поворачивает перегрузочную тележку до тех пор, пока подвеска не ляжет в траверсу конвейера и между крюком и подвеской не окажется зазор, необходимый для вывода крюка из-под подвески при помощи рычага
7пневмоцилиндром 8. Пневмоцилиндр 17 поворачивает направляющие с перегрузочной тележкой в горизонтальное положение,
а затем механизм шагового перемещения возвращает перегрузочную телел ку в исходную позицию перед разгрузкой.
После этого механизм синхронизации отключается, и пневмоцилиндр 13 возвращает устройство в положение разгрузки.
Предлагаемое устройство позволяет передавать подвески с подвешенными крупногабаритными грузами с одного подвесного конвейера на другой при максимальном
их сближении и более эффективно использовать высотные размеры конвейеров, значительно экономить производственные объемы цехов.
Формула изобретения
I. Устройство для перегрузки подвесок подвесного конвейера с одного пути на другой, включающее установленную на направляющих перегрузочную приводную тележку, на раме которой установлены захватные крюки, отличающееся тем, что, с целью перегрузкиподвесок с длинномерными изделиями, перегрузочная тележка имеет механизм ее шагового перемещения, захватные крюки щарнирно установлены на тележке и соединены с приводом их поворота посредством рычага, а направляющие перегрузочной тележки выполнены поворотными в вертикальной плоскости от привода, при этом приводы поворота направляющих, захватных крюков и механизма щагового перемещения тележки выполнены в виде пневмоцилиндров.
2. Устройство по п. 1, отличающееся тем, что механизм щагового перемещения тележки выполнен из звездочки с храповым колесом, которая установлена па щтоке пневмоцплиндра, п замкнутой цепи, одно звено которой имеет упор, входящий в паз, выполненный в раме перегрузочной тележки.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 186331, кл. В 65G 47/52, 1964.
2.Авторское свидетельство СССР № 328045, кл. В 65G 47/52, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для перегрузки подвесок подвесного конвейера | 1974 |
|
SU604769A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для навешивания и съема грузовых подвесок с грузоносителей подвесного конвейера | 1980 |
|
SU927670A1 |
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1152894A1 |
| Поточная линия для окраски и сушки крупногабаритных и длинномерных изделий | 1977 |
|
SU745818A1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| Устройство для перегрузкипОдВЕСОК | 1979 |
|
SU810585A1 |
| Устройство для перегрузки подвесок с подвесного грузонесущего конвейера на рабочее место | 1975 |
|
SU612868A1 |
| Устройство для перегрузки подвесок с подвесного конвейера | 1978 |
|
SU770951A1 |


18
г±
Риг. 7
ё E Ei etflS ---feFE7 i:ЩfcЙahiй г т1г : ГЛЕзг ES -if- j j-::згп|±и3 3 -|-;t ЖПМ -it:-v ir -1 illj S-4ь r-: j:th-7 -УГЕ
5s Q. Ч- -, p-f IF 1
7J
11
(риг. 8
