00
;о
00 О5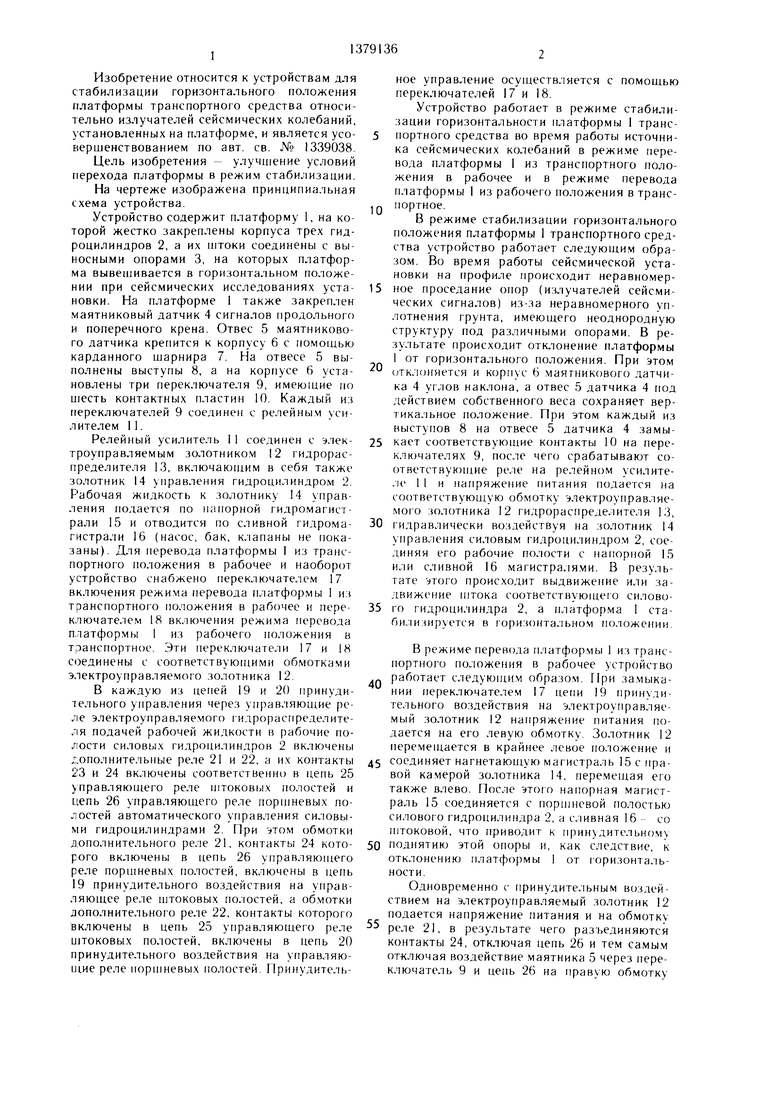

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Источник сейсмических колебаний | 1989 |
|
SU1714548A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1981 |
|
SU1009817A1 |
| Источник сейсмических колебаний | 1989 |
|
SU1642415A2 |
| Источник сейсмических колебаний | 1986 |
|
SU1509768A2 |
| Самоходный источник сейсмических колебаний | 1988 |
|
SU1608604A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1982 |
|
SU1066844A1 |
| Источник сейсмических колебаний | 1984 |
|
SU1236395A1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
Изобретение относится к устройствам для стаби.:1изации горизонта.чьнок) по. южения платформы транспортного средства относительно излучателей сейсмически.х колебаний и обеспечивает улучшение условий перехода платформы 1 в режи.м стабилизации. На платформе установлен маятниковый датчик углов наклона, в корпусе которого размещен отвес 5, исполнительные гидропи- линдры 2 опор 3 соединены с гидрораспределителем 13с электроуправляющимн золотниками, в цепи управляюши.х реле nopni- невы.х и, соответственно, штоковых полостей электроуправляемых гидрораснредели- телей включены контакты 23 и 24 допол- нительны.х реле 21 и 22, при этом обмотки дополнительных реле, контакты которых включены в цепи управляюши.х реле порпше- вы.х полостей, включены в пени управляющих реле штоковых полостей, а обмотки дополнительных реле, контакты которых включены в цепи управляющих pe,ie штоковых полостей, включены в цепи управ.чяюших ре,пе поршневых полостей. 1 ил. е (Л
Изобретение относится к устройствам для стабилизации горизонтального положения платформы транспортного средства относительно излучателей сейсмических колебаний, становленных на платформе, и является усовершенствованием по авт. св. № 1339038. Цель изобретения - улучшение условий перехода платформы в режи.м стабилизации. На чертеже изображена принципиальная схема устройства.
Устройство содержит платформу 1, на которой жестко закреплены корпуса трех гидроцилиндров 2, а их штоки соединены с выносными опорами 3, на которых платформа вывешивается в горизонтальном положении при сейсмических исследованиях установки. На платформе 1 также закреплен маятниковый датчик 4 сигналов продольного и поперечного крена. Отвес 5 маятникового датчика крепится к корпусу 6 с помощью карданного шарнира 7. На отвесе 5 выполнены выступы 8, а на корпусе 6 установлены три переключателя 9, имеющие по njecTb контактных пластин 10. Каждый из переключателей 9 соединен с релейны.м усилителем 11.
Релейный усилитель 1 1 соединен с элек- троуправляемым золотником 12 гидрораспределителя 13, включающим в себя также золотник 14 управления гидроцилиндром 2. Р абочая жидкость к золотнику 14 управления подается по напорной гидромагистрали 15 и отводится по сливной гидромагистрали 16 (насос, бак, клапаны не показаны). Для перевода платформы 1 из транспортного положения в рабочее и наоборот устройство снабжено переключателем 17 включения режима перевода платформы 1 из транспортного положения в рабочее и переключателем 18 включения режи.ма перевода платформы I из рабочего положения в транспортное. Эти переключатели 17 и 18 соединены с соответствующими обмотками электроуправляемого золотника 12.
В каждую из цепей 19 и 20 принудительного управления через управляющие ре- .пе электроуправляе.мого г идрораспределите- ля подачей рабочей жидкости в рабочие полости силовых гидроцилиндров 2 включены .ополнительные реле 21 и 22, а их контакты 23 и 24 включены соответственно в цепь 25 управляющего реле штоковььх полостей и цепь 26 управляющего реле пор1пневых полостей автоматического управления силовыми гидроцилиндрами 2. При обмотки дополнительного реле 21, контакты 24 которого включены в цепь 26 управляюп1его реле поршневых полостей, включены в цепь 19 принудительного воздействия на управляющее реле штоковых полостей, а обмотки дополнительного реле 22, контакты которого включены в цепь 25 управляющего реле ujTOKOBbix полостей, включены в цепь 20 принудительного воздействия на управляющие реле поршневых полостей. Принудительное управление осуществ. тется с помощью переключателей 17 и 18.
Устройство работает в режиме стабилизации горизонтальности платформы 1 транспортного средства во время работы источника сейсмических колебаний в режиме перевода платформы I из транспортного положения в рабочее и в режиме перевода платфор.мы 1 из рабочего положения в трансQ портное.
В режиме стабилизации горизонтального положения платформы 1 транспортного средства устройство работает следуюши.м образом. Во время работы сейсмической установки на профиле происходит иеравномер5 ное проседание опор (излучателей сейсмических сигналов) из-за неравномерного уплотнения грунта, имеющего неоднородную структуру под различными опорами. В результате происходит отклонение платформы I от горизонтального положения. При этом
(;ткл(Я1яется и корпус 6 маятникового датчика 4 углов наклона, а отвес 5 датчика 4 под действием собственного веса сохраняет вертикальное положение. При этом каждый из выступов 8 на отвесе 5 датчика 4 замы5 кает соответствуюп1ие контакты 10 на переключателях 9, после чего срабатывают соответствующие реле на релейном усилите- .le 1 I и напряжение питания подается на соответствующую обмотку электроуправляемого золотника 12 гидрораспределителя 13,
0 гидравлически воздействуя на золотник 14 управления силовым гидроцилиндром 2, соединяя его рабочие полости с папоррюй 15 или сливной 16 магистралями. В результате этого происходит выдвижение или за- движение 1птока соответствуюше1 о силово5 го гидроцилиндра 2, а платформа I стабилизируется в горизоита. гьном положении.
В режиме перевода платформы 1 из транспортного положения в рабочее устройство
- работает следующи.м образом. При за.мыка- нии переключателем 17 цепи 19 принудительного воздействия на электроуправляе- мый золотник 12 напряжение питания подается на его левую обмотку. Золотник 12 перемешается в крайнее левое положение и
5 соединяет нагнетающую магистраль 15 с правой камерой золотника 14, перемещая его также влево. После этого напорная магистраль 15 соединяется с поршневой полостью силового гидроцилипдра 2, а сливная 16 - со штоковой, что приводит к принудительному
0 поднятию этой опоры и, как следствие, к отклонению платформы 1 от горизонтальности.
Одновременно с принудительным воздействием на электроуправляемый золотник 12 подается напряжение питания и на обмотку
5 реле 21, в результате чего разъединяются контакты 24, отключая цепь 26 и тем самым отключая воздействие маятника 5 через переключатель 9 и цепь 26 на правую обмотку
электроуправляемого золотника 12 (отключается горизонтальная стабилизация только этой принудительно управ. шемой опоры).
Указанное отклонение платформы 1 от горизонтальности приводит к отклонению маятника 5 датчика 4, который своими выступами 8 замыкает соответствующие наружные контакты 10 переключателей 9, тем самым подавая напряжение питания на соответствующие электроуправляемые золотники 12, которые в свою очередь способствуют соединению нагнетающей магистра- 1И 15 с поршневыми полостями силовых гидроцилиндров 2 остальных двух групп опор. В результате все силовые гидро 1илиндры 2 всех трех групп опор соединены своими поршневыми полостями с нагнетающей магистралью 15, что приводит к подъему платформы 1 транспортного средства. Так как горизонтальная стабилизация опоры принудительного подъема отключена и нагнетающая магистраль 15 не соединяется со щто- ковой полостью этой группы силовых гидроцилиндров 2 (не происходит опускание этой опоры за счет автоматической стабилизации), осуществляется равно.мерный горизонтальный подъем платформы 1 транспортного средства. После того, как платформа 1 достигает необходимой высоты подъема, переключателем 17 отключают напряжение питания и процесс перевода платформы 1 из транспортного положения в рабочее прекращается.
В режиме перевода платформы 1 из рабочего положения в транспортное устройство работает следующим образом. При замыкании переключателем 18 цепи 20 подается напряжение питания на обмотку реле 22, в результате чего разъединяются контакты 23 цепи 25, отключая тем самым воздействие маятника 5 на левую обмотку электроуп- равляемогозолотника 12 (отключается горизонтальная стабилизация только этой принудительно управляемой опоры).
Одновременно с этим подается напряжение питания на правую обмотк электро- управляемого золотника 12. Золотник 12 перемещается в крайнее правое положение и соединяет нагнетающую магистраль 15 с левой камерой золотника 14, перемеп1ая его также вправо. После этого нагнетающая ма- гистра.чь 15 соединяется со птоковой полостью силового гидроцилиндра 2, а сливная магистраль 16 - с порщневой, что приводит к принудительному опусканию этой опоры и, как следствие, к отклонению платформы 1 от горизонтальности. Это отклонение приводит к отклонению маятника 5 датчика 4, который своими выступами 8 замыкает соответствующие внутренние контакты 10 переключателей 9, тем самым подавая напряжение питания на правые обмотки соответствующих электроуправляе- мых золотников 12, которые в свою очередь способствуют соединению нагнетающей магистрали 15 со щтоковыми полостями силовых гидроцилиндров 2 остальных двух групп опор. В результате все силовые гидроцилиндры 2 всех трех групп опор соединены своими щтоковыми полостями с нагнетающей магистралью 15, что приводит к опускаПИЮ платформы 1 транспортного средства. Так как горизонтальная стабилизация опоры принудительного опускания отключена и нагнетающая магистраль 15 не соединяется с порщневой полостью этой группы силовых гидроцилиндров 2 (не происходит подъема этой опоры за счет автоматической стабилизации горизонтального положения платформы 1), осуществляется равномерное горизонтальное опускание платформы 1 транспортного средства. После того, как штоки силовых гидроцилиндров 2 достигают своего крайнего положения, переключателем 18 отключают напряжение питания и процесс перевода платформы 1 из рабочего положения в транспортное прекрап1ается.
30
Формула изобретения
Устройство для стабилизации горизонтального положения платформы транспортного средства по авт. св. „Nfe 1339038, отличающееся тем, что, с целью улучшения усло5 ВИЙ перехода платформы в режим стабилизации, в цепи управляющих реле для подачи текучей среды в поршневые и соответственно, niTOKOBbie полости электроуправ- ляемых гидрораспределителей исполнитель0 ных гидроцилиндров выносных опор включены контакты дополнительных реле, при этом обмотки дополнительных реле, контакты которых включены в цепи управляющих реле для подачи текучей среды в поршневые полости, включены в цепи управляющих реле
5 лля подачи текучей среды в щтоковые полости, а обмотки дополнительных реле, контакты которых включены в цепи управляющих реле для подачи текучей среды в щтоковые полости, включены в цепи управляющих реле для подачи текучей среды в поршневые полости.
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
