2.Механизм поп.1, о т л и чающийся тем, что. заталкивающая планка выполнена в виде штанг и закрепленной на них nocpe;ci ством оси с возможностью вращения обреаной рейки, при этом рычаги имеют втулочные направляющие, в которых размещены штанги, а при-сспособление возврата рычагов в исходное положение выполнено в виде демпфирующих пружин, закрепленных на корпусе и рычагах,
3.Механизм по п.1, о Т л и чающийся тем, что корпус
выполнен с пазами, а подъемный стол имеет ползуны,размещенные в пазах корпуса.
4. Механизм по п.1, о т л и чающийся тем, что подъемный стол выполнен в виде вертикально расположенного листа с П-образным вырезом, перпендикулярно прикрепленных к листу реек, имеквдих в сечении форму прямоугольного
треу голь ни ка, и свободные концы ки.
1.МЕХАНИЗМ ЗАГРУЗКИ К АППАРАТАМ, включающий непрерывно движущиеся носители, концентрично расположенные на корпусе рычаги с заталкивающей планкой на одном конце и упором управления на другом, подъемный стол, контактирующий с носителями, и приспособление возврата рычагов в исходное положение, отличающийся тем, что, с целью повышения надежности рабо:ты механизма загрузки, упор управления снабжен пальцем, установленным с возможностью выдвижения и взаимодействия с носителями, при этом упор установлен на рычагах посредством оси и стягивающей втулки-подшипника.с возможностью . поворота ификсации. (Л С Г 4 СЛ
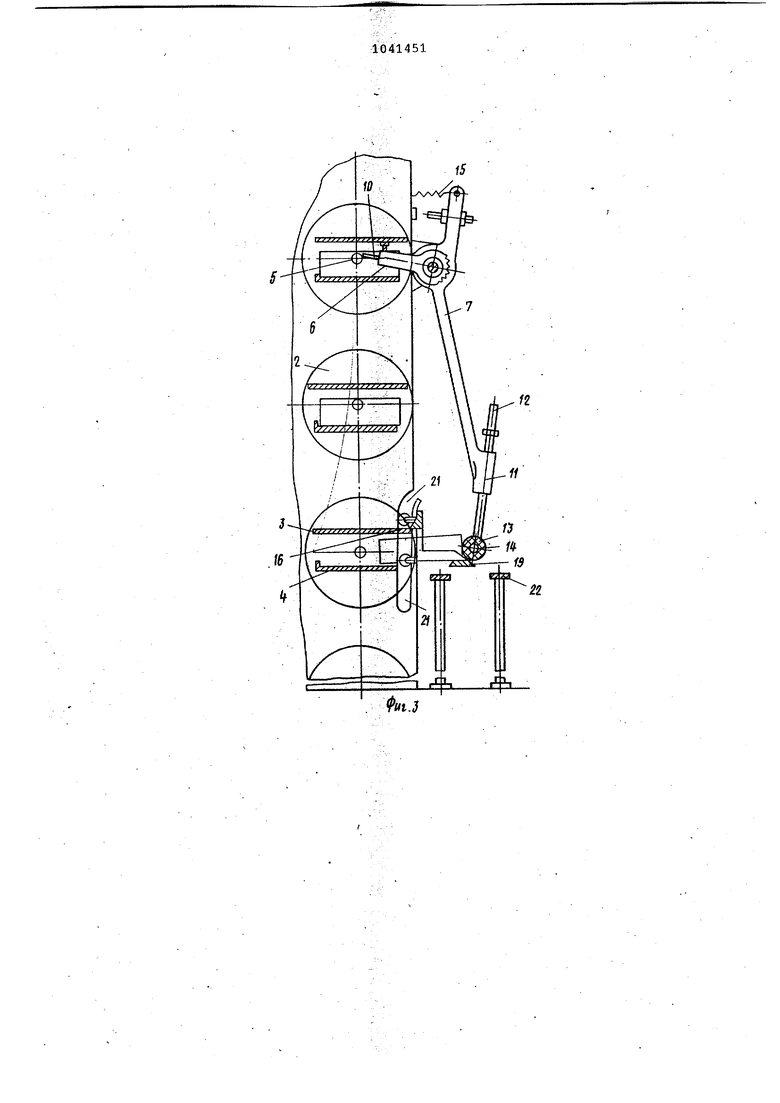
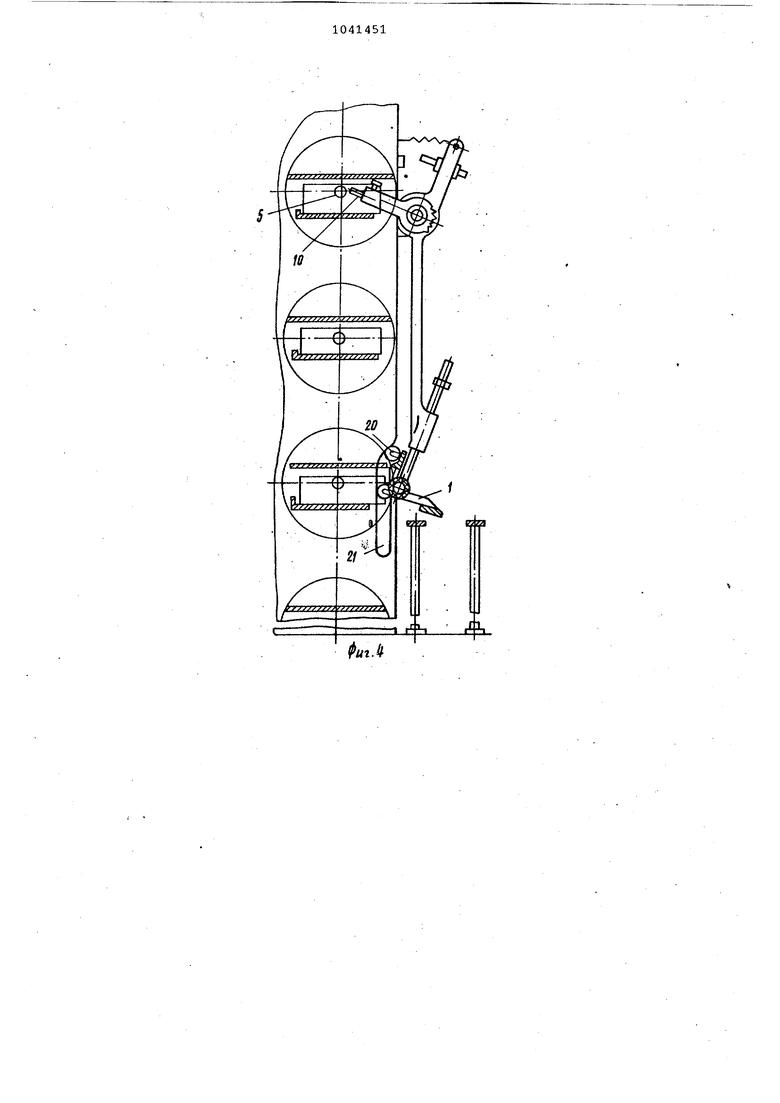
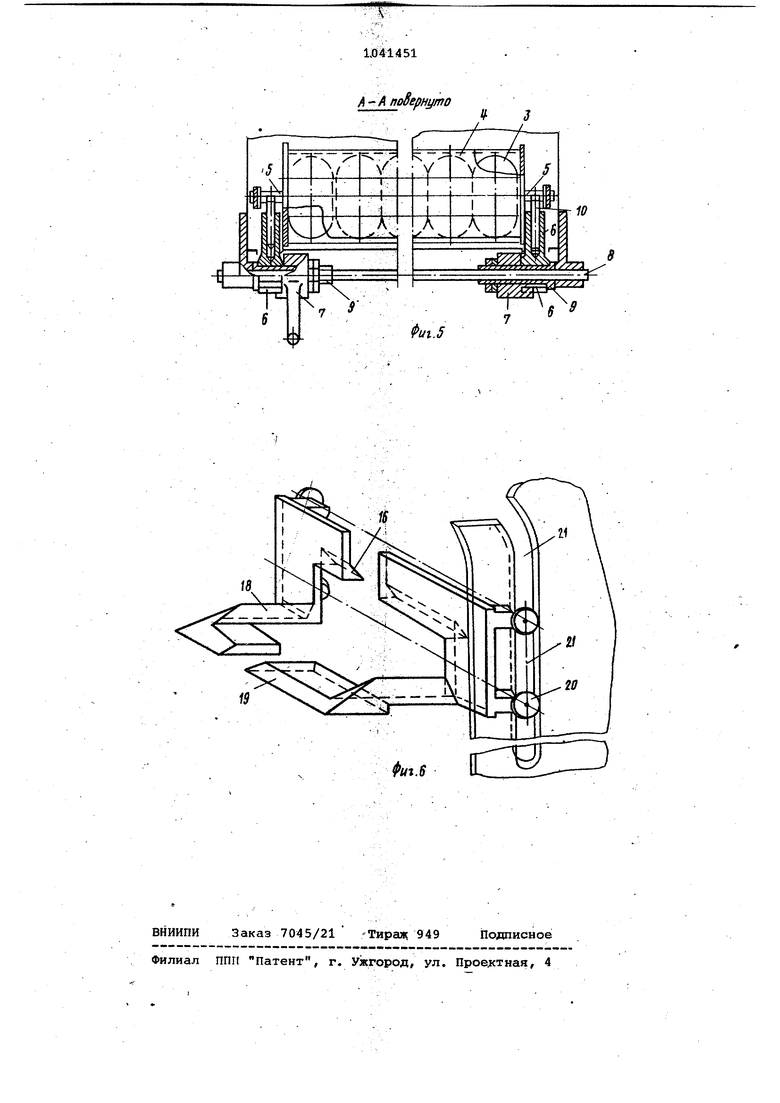
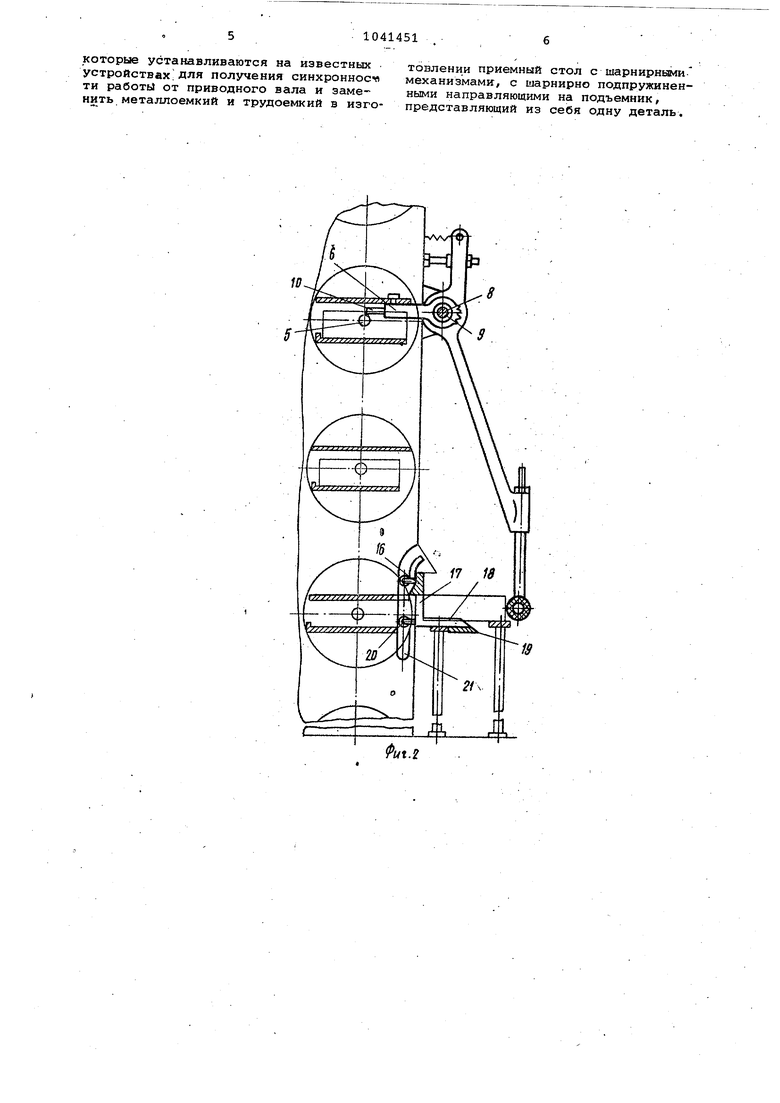
1 . Изобретение относится к технике транспортирования штучньк грузов, а именно, банок, и предназначено дл загрузки в аппаратах тепловой обра ботки пищевых продуктов в непрерыв но движущихся носителях. Извест--- механизм загрузки к аппаратаь;, включающий непрерывно движущиеся носители, концентрично расположенные на корпусе рычаги с заталкивающей планкой на одном кон це и упором управления на другом, подъемный стол, контактирующий с носителями, и приспособление возврата рычагов . в исходное положение СИ . Недостатком известного механизма загрузки является конструктивная сложность осуществ}1енйз синхрони ма работы заталкивателя приемного стола с непрерывно движущимся носи лем.. Кроме того, заталкиватель, расечитанный на один размер , .работает с ударом,что неприемлемей, для алюминиевых банок по ГОСТ имеет усложненный механизм синхро низации от ведущего вала транспорте ра; приемный стол - усложненное зве но подводящего транспортера банок, .громоздкий, конструктивно сложный и трудоемкий в изготовлении, работа щий при -пбмощи шарнирных механизмов Цель изобретения - повышение надежности работы механизма. Поставленная цель достигается тем, что в механизме загрузки упор управления снабжен пальцем, установ ленным с возможностью выдвижения и взаимо1/ействия с носителями, при этом упор установлен на рьпагах посредством оси и стягивающей втулки-подшипника с возможностью поворо та и фиксации. При этом заталкивающая планка выполнена в виде штанг и закрепленной на них посредством оси с возможностью вращения обрезной рейки, рычаги имеют втулочные направляющие, в которых раЭ.мещены штанги, а приспособление возврата рычагов в исходное положение выполнено в виде демпфирующих пружин, закрепленных на корпусе и рычагах. Кроме того,корпус выполнен с пазами, а подъемный стол имеет ползуны, размещенные в пазах корпуса. Подъемный стол выполнен в виде вертикально расположенного листа с П-образным вырезом, перпендикулярно прикрепленных к листу реек, имеющих в сечении форму прямоугольного треугольника и соеди- няющие свободные концы реек планки. На фиг.1 изображен момент контакта верхней полки носителя с выступом у подъемника; на фиг. 2 - момент кон- такта оси носителя с регулируемыми плечами рычагов; на фиг.3 - одно из средних положений банок во время их нагрузки,- на фиг. 4 - момент окончания загрузки банок; на фиг.5 - разрез А-А на фиг.1; иа фигviG - подъемник. Механизм загрузки к аппаратам имеет заталкиватель (не показан) и подъемный стол 1, осуществляет работу с известными аппаратами для тепловой обработки продуктов в банках, имеющихнепрерывно движущийся бесконечный цепной транспортер с шарнирно укрепленными носителями 2, в которых имеются полки 3 и 4 и ось 5. Верхняя полка 3 выступает вперед относительно нижней полки 4 на величину длины выступа у подъемника 1. Заталкиватель состоит из двух концентрично расположенных на корпусе рычагов. Каждый .рычаг имеет плечи б и 7, соединяемые на оси 8 их вращения стягиваннцей, закрепллющей втулкой-подшипником 9, что дает возможность регулировать угол, образуемый плечами 6 и 7. Плечо 6 каждого рычага является упором и регулируется по длине пальцем 10, что позволяет увеличивать и уменьшать зацепление рычагов с осью 5 в носителе 2, а плечи 7 восновании имеют жестко закрепленные втулочные направляющие 11, по которым перемещаются штанги 12, соединенные с осью 13 с вращающейся в,ней загрузочной обрезиненной цилиндрической рейкой 14,являющейся заталкиванзщей . планкой. Применяемая регулировка- уг ла между плечами 6 и 7, регулировка длины плеча 6 пальцем ГО и перемещающаяся загрузочная обрезиненная цилиндрическая рейка 14, в свою оче редь, дают возможность изменять ход загрузочной юбрезиненной цилиндрической рейки 14 и одновременно выпо нять функцию боковой направляющей на различные размеры банок в зоне загрузки, устранять ее ударные действия, производя плавное перемещени банок в носители. Приспособление возврата рычагов в исходное положение выполнено в виде пружин 15, выполняющих роль демпферов, гасящих ударное действие при контакте оси 5 носителя 2 с пальцем 10, плеча 6 и после окончания цикла загрузки банок в носитель 2 отводящих загрузочную обрезиненную цилиндрическую рейку 14 в иcxoд ное положение Для начала рового цик ла загрузки. Подъемный стол 1 представляет со бой деталь с закрепленными на ней цилиндрическими., пол ЗУ нами. Деталь имеет кЪнфигурацию вертикально расположенного прямоугольного листа (без поз.) с выступом 16 на над П-образным вырезом 17 и перпендикуг. лярно направленными к основанию дву мя призматическими с сечением прямоугольного треугольника рейками Г8 соединенными на концах планкой 19По углам прямоугольного листа подъе ного стола 1 имеются цилиндрические ползуны 20, вертикально передвигающиеся по прямым,с закруглениями па зам 21, концентрично расположенным в корпусе аппарата.Каждая часть детали подъемного стола 1 последовательно в циклах .загрузки банок в носители 2 выполня свою работу; Верхняя часть листа над П-образным вырезом 17 является заслонкой для банок от движущихся в аппарате носителей 2 и одновременне боковой направляквдей банок в период накопления банок на направлякидих 22 (си. фиг.1). Рейки 18 выполняют функцию бокорых направляющих накопленного пакета банок на направляющих 22 в период, загрузки банок на полку 4 носителя 2 (см. фиг.З). Выступ 16 , входящий в зацепления с полкой 3 носителя 2, перемещает по вертикали ... подъемный стол 1, соскальзывание в|Ь1ступа 16 с полки 3 проходит в период, когда верхние ползуны 20 подъемного стола i попадают в изгиб пНзов 21.Планка 19 служит для подъема и направления банок в период загрузки их на полку 4 (см. фиг.Э). Перед началом работы производится настройка заталкивателя на определенный размер банок регулировкой длины плеча с пальцем 10 и угла между плечами 6 и 7. Механизм загрузки работает следующим образом. Банки подаются и накапливаются на нижних направляющих 22, фиксируются от боковых перемещений загрузочной обрезиненной цилиндрической рейкой 14 и верхней частью листанад П-образным вырезом подъемного стола 1. В период накапливания Йанок на направляющих 22, до начала загрузки банок на .полку 4 (см.фиг.1) , носитель 2 кромкой полки 3 захваты-вает выступ 16 у подъемного стола 1, поднимает его по пазам 21, по ходу движения рейки 18 подъемного стола 1 снизу охватывает накопленный пакет банок (см. Ф.ИГ. 2 и 3) . В момент, когда по -ходу движения П-образн1 вырез 17 подъемного стола 1 отк1рывается на высоту банок (см, фиг.2), оси 5 носителя 2 вступают в контакт с пальцем 10 и загрузочной обрезиненной цилиндрической рейкой 14 начинают перемещать банки (см. фиг.2). При переходе банок в носитель 2 на полку 4 (см. фиг.З) планка 19 подъемного стола 1 одновременно с полкой 4 носи: теля 2 поднимает банки с направляющих 22 с одновременным перемещением их на полку 4 носителя 2 загрузочной обрезиненной цилиндрической рейкой 14, С момента перехода центра тяжести банок на. полку 4 происходит начало соскальзывания выступа. 16 с полки 3 за счет отвода подъемного стола 1, движущегося своими верхними цилинд- .рическймй ползунами 20 по изгибу i паза 21. В момент окончания загрузки банок носители 2 на полку 4 (см. фиг.4) выступ 16 подъемного стола .1 и паль- . цы 10 рычагов выходятиз зацепления с -носителями 2 и принимают первоначальное состояние, рычаги за счет пружин 15 возврата, а подъемный стол 1 под своим весом. Использование предлагаемого изобетения позволит освободить механизм агрузки от ряда трудоемких деталей, на известных устройствах, для получения синхронное ти работы от приводного вала и замени.ть.метаплоемкий и трудоемкий в изго8
иг.2 товлении приемный стол с шарнирными. механизмами, с ыарнирно подпру ине ными направляющими на подъемник; представляющий из себя oJSy деталь.
15
1.31Л41451
ft-AnDSepHymo
Ц
h
я
SR
773
ггг1гл.
ff-f ff