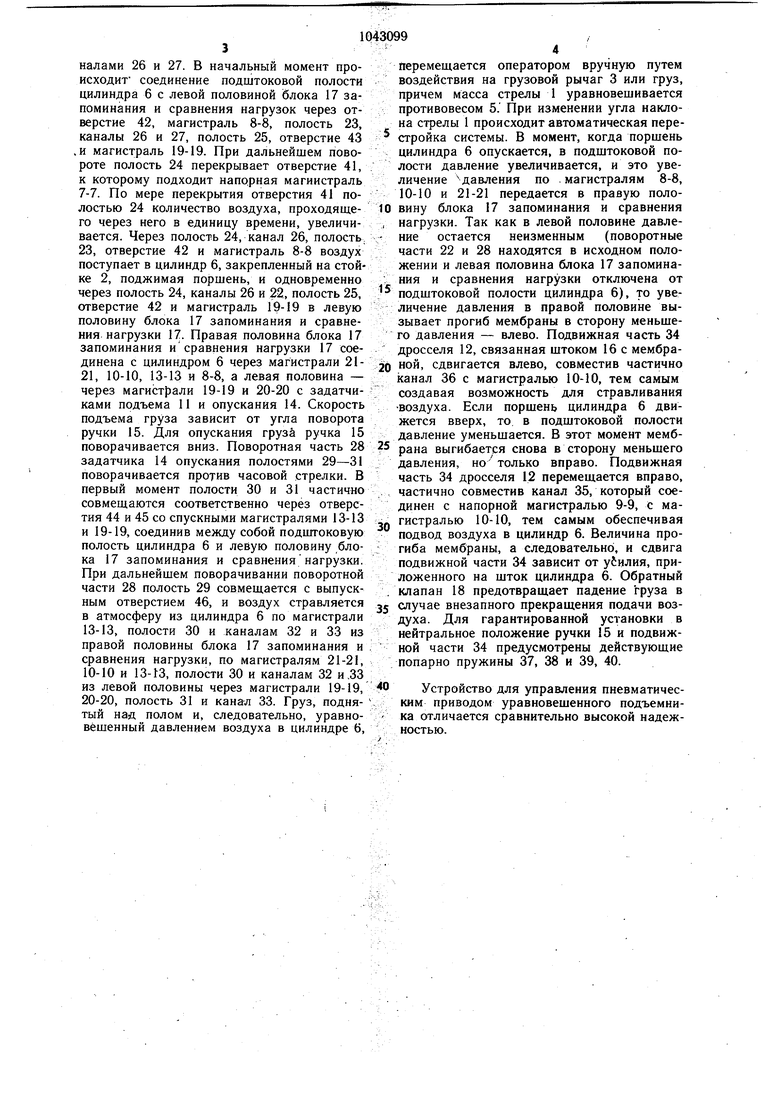
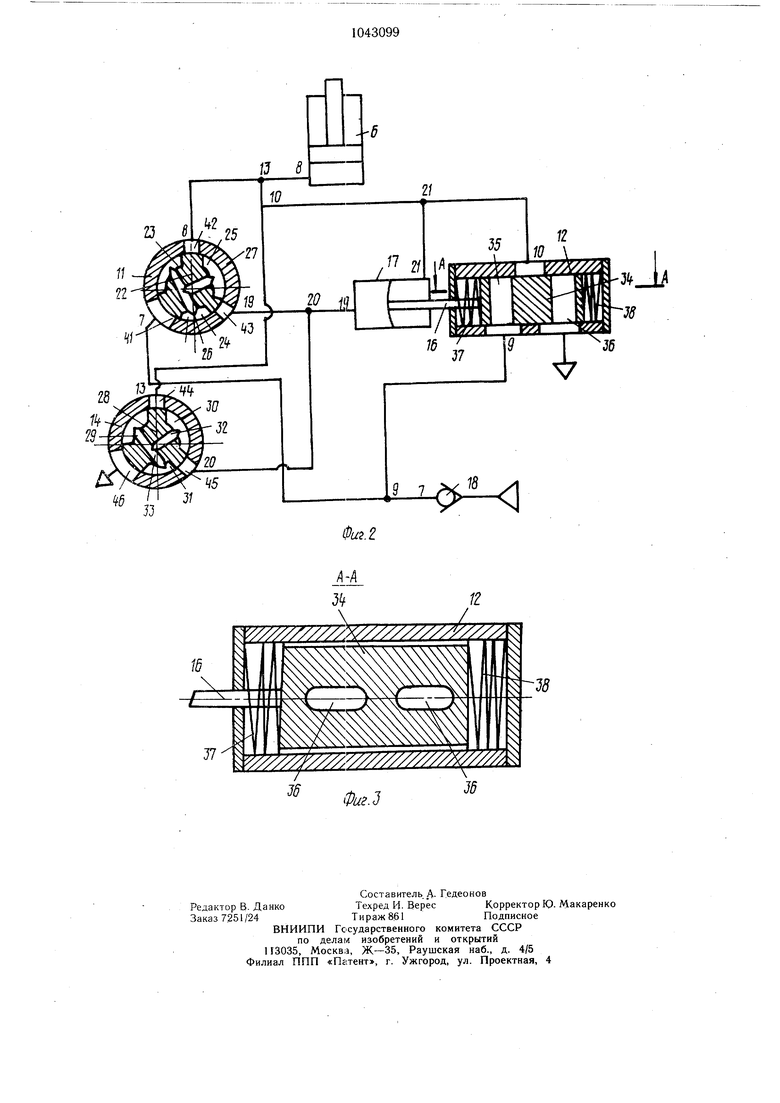
Изобретение относится к области механизации погрузочно-разгрузочных и транспортных работ, а именно к пневматическим приводам подъемников с уравновешиванием груза. Известно устройство для управления пневматическим приводом стрелы уравновешенного подъемника, содержащее источник питания, соединенный через обратный клапан с входом задатчика подъема стрелы и входом регулировочного дросселя, первый выход которого вместе с первым выходом задатчика подъема стрелы и входом регулировочного дросселя, первый выход KOTopoi o вместе с первым выходом задатчика подъема стрелы соединен с подъемным цилиндром стрелы, а второй выход регулировочного дросселя соединен с атмосфе- рой, а также блок запоминания и сравнения нагрузки цилиндра, управляющие входы которого соединены соответственно с вторым выходом задатчика подъема стрелы и подъемным цилиндром, а выход блока злпоминания и сравнения нагрузки цилиндра кинематически связан с подпружиненным подвижным элементом регулировочного дросселя, и задатчик опускания стрелы, причем подвижные элементы упомянутых задатчиков соединены с приводной рукояткой.{1 . Недостатком известного устройства является сравнительно низкая надежность. Цель изобретения - повышение надежности устройства. Указанная цель достигается тем, что в устройстве для управления пневматическим приводом стрелы уравновешенного подъемника, содержащем источник питания, соедиНенный через обратный клапан со входом задатчика подъема стрел ы и входом регулировочного дросселя, первый выход которого вместе с первым выходом задатчика подъема стрелы соединен с подъемным цилиндром стрелы, а второй выход регулировочного дросселя соединен с атмосферой, а также блок запоминания и сравнения нагрузки цилиндра, управляющие входы которого соединены соответственно с вторым выходом задатчика подъема стрелы и подъемным цилиндром, а выход блока запоминания и сравнения нагрузки цилиндра кинематически связан с подпружиненным подвижным элементом регулировочного дросселя, и задатчик опускания стрелы, причем поворотные элементы упомянутых задатчиков соединены с приводной рукояткой, поворотные элементы задатчиков образуют с корпусом задатчиков по крайней мере три полости, связанные соответсвенно с входом и выходами задатчиков, при этом поворотные элементы задатчиков выполнены с двумя сообщающимися каналами, расположенными под углом друг к другу и соединенными с полостями, причем входы задатчика опускания стрелы соединены с соответствующими выходами задатчика подъема стрелы, а выход задатчика опускания стрелы соединен с атмосферой. На фиг. 1 изображен уравновешенный подъемник, общий вид; на фиг. 2 - принципиальная схема устройства для управления пневматическим приводом уравновешенного подъемника; на фиг. 3 - разрез А-А на фиг. 2. Уравновещивающий подъемник содержит грузовую стрелу 1, выполненную в виде шарнирного, параллелограмма п закрепленную на стойке 2. На стреле 1 закреплен грузовой рычаг 3, на конце которого размещен грузозахватный орган 4. На противоположном конце стрелы закреплен противовес 5. Грузовая стрела 1 связана с силовым органом 6, например пневматическим. Цилиндр 6 соединен с источником мощности напорными магистралями 7-7-10-10, проходящими через задатчик 11 подъема и регулировочный дроссель 12, а с атмосферой - магистралями 12-13 и 10-10 через задатчик 14 опускания и регулировочный дроссель 12. Задатчики подъема 11 и опускания 14 расположены на грузовом рычаге 3 и приводятся в действие ручкой 15. Дроссель 12 связан щтоком 16 с блоком-17 запоминания и сравнения нагрузки. В напорной магистрали 7-7 установлен обратный клапан 18. Задатчик 11 подъема соедин с левой половиной блока 17 запоминания и сравнения нагрузки напорной магистралью 19-19, а задатчик 14 опускания - магистралью 20-20. Правая половина блока 17 запоминания и сравнения нагрузки через магистрали 21-21, 10-10, 13-13 и 8-8 соединена с цилиндром 6. В поворотной части 22 задатчика 11 имеются полости 23-25, соединенные между собой каналами 26 я 27, а ъ поворотной части 28 задатчика 14 имеются полости 29-31, соединенные между собой каналами 32 и 33. Подвижная часть 34 дросселя 12 имеет два отверстия 35 и 36. Возвратные пружины 37 и 38 предусмотрены для обеспечения установки подвижной части 34 в нейтральном положении. При помощи возвратных пружин 39 и 40 поворотные части 22 и 28 возвращаются в нейтральное положение. Ма гистрали 7-7, 8-8 и 19-19 подведены соответственно к отверстиям 41-43 задатчика 11. Магистрали 13-13 и 20-20 подведены соответственно к отверстиям 44 и 45. Отверстие 46 сообщается с атмосферой. Устройство для управления пневматическим приводом уравновешенного подъемника работает следующим образом. Застропив груз при помощи грузозахватного органа 4, рабочий поворачивает ручку 15 вверх, при этом поворачивается по часовой стрелке поворотная часть 22 задатчика 11 подъема с полостями 23-25 и каналами 26 и 27. В начальный момент происходит соединение подштоковой полости цилиндра 6 с левой половиной блока 17 запоминания и сравнения нагрузок через отверстие 42, магистраль 8-8, полость 23, каналы 26 и 27, полость 25, отверстие 43 , и магистраль 19-19. При дальнейшем повороте полость 24 перекрывает отверстие 41, к которому подходит напорная магиистраль 7-7. По мере перекрытия отверстия 41 полостью 24 количество воздуха, проходяще- 10 го через него в единицу времени, увелнчи- , вается. Через полость 24, канал 26, полость 23, отверстие 42 и магистраль 8-8 воздух поступает в цилиндр 6, закрепленный на стойке 2, поджимая поршень, и одновременно через полость 24, каналы 26 и 22, полость 25, отверстие 42 и магистраль 19-19 в левую половину блока 17 запоминания и сравнения нагрузки 17. Правая половина блока 17 запоминания исравнения нагрузки 17 соединена с цилиндром 6 через магистрали 21- jo 21, 10-10, 13-13 и 8-8, а левая половина - через магистрали 19-19 и 20-20 с задатчиками подъема И и опускания 14. Скорость подъема груза зависит от угла поворота ручки 15. Для опускания груза ручка 15 поворачивается вниз. Поворотная часть 28 25 задатчика 14 опускания полостями 29-31 поворачивается против часовой стрелки. В первый момент полости 30 и 31 частично совмещаются соответственно через отверстия 44 и 45 со спускными магистралями 13-13 и 19-19, соединив между собой подштоковую полость цилиндра 6 и левую половину блока 17 запоминания и сравнения нагрузки. При дальнейшем поворачивании поворотной части 28 полость 29 совмещается с выпускным отверстием 46, и воздух стравляется в атмосферу из цилиндра 6 по магистрали 13-13, полости 30 и каналам 32 и 33 из правой половины блока 17 запоминания и . сравнения нагрузки, по магистралям 21-21, 10-10 и 13-13, полости 30 и каналам 32 и,33 из левой половины через магистрали 19-19, 0 20-20, полость 31 и канал 33. Груз, подня- тый над полом и, следовательно, уравновешенный давлением воздуха в цилиндре 6, перемещается оператором вручную путем воздействия на грузовой рычаг 3 или груз, причем масса стрелы 1 уравновешивается противовесом 5. При изменении угла наклона стрелы 1 происходит автоматическая перестройка системы. В момент, когда поршень цилиндра 6 опускается, в подштоковой полости давление увеличивается, и это увеличение давления по магистралям 8-8, 10-10 и 21-21 передается в правую половину блока 17 запоминания и сравнения нагрузки. Так как в левой половине давление остается неизменным (поворотные части 22 и 28 находятся в исходном положенин и левая половина блока 17 запоминания и сравнения нагрузки отключена от подштоковой полости цилиндра 6), то увеличение давления в правой половине вызывает прогиб мембраны в сторону меньшего давления - влево. Подвижная часть 34 дросселя 12, связанная штоком 16 с мембраной, сдвигается влево, совместив частично канал 36 с магистралью 10-10, тем самым создавая возможность для стравливания -воздуха. Если поршень цилиндра 6 движется вверх, то в подштоковой полости давление уменьшается. В этот момент мембрана выгибается снова в сторону меньшего давления, но только вправо. Подвижная часть 34 дросселя 12 перемещается вправо, частично совместив канал 35, который соединен с напорной магистралью 9-9, с магистралью 10-10, тем самым обеспечивая подвод воздуха в цилиндр 6. Величина прогиба мембраны, а следовательно, и сдвига подвижной части 34 зависит от усилия, приложенного на шток цилиндра 6. Обратный клапан 18 предотвращает падение груза в случае внезапного прекращения подачи воздуха. Для гарантированной установки в нейтральное положение ручки 15 и подвижной части 34 предусмотрены действующие попарно пружины 37, 38 и 39, 40. Устройство для управления пневматическим приводом уравновещенного подъемника отличается сравнительно высокой надежностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1972 |
|
SU334164A1 |
| Гидропривод грузоподъемной машины | 1979 |
|
SU889807A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНЫХ СРЕДСТВ ПОЛУЖИДКИМ НАВОЗОМ | 1988 |
|
RU2022913C1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| Устройство для формирования и разборки пакетов штучных грузов | 1984 |
|
SU1421651A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| Гидравлическая система погрузчика | 1991 |
|
SU1827443A1 |
| Устройство управления грузоподъемным краном | 1980 |
|
SU965966A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМ ПРИВОДОМ СТРЕЛЫ УРАВНОВЕШЕННОГО ПОДЪЕМНИКА, содержащее источник питания, соединенный через обратный клапан со входом задатчика подъема стрелы и входом регулировочного дросселя, первый выход которого вместе с первым выходом задатчика подъема стрелы соединен с подъемным цилиндром стрелы, а второй выход регулировочного дросселя соединен с атмосферой, а также блок запоминания и сравнения нагрузки цилиндра, управляющие входы которого соединены соответственно с вторым выходом задатчика подъема стрелы и подъемным цилиндром, а выход блока запоминания и сравнения нагрузки цилиндра кинематически связан с подпружиненным подвижным элементом регулировочного дросселя, и задатчик опускания стрелы, причем поворотные элементы упомянутых задатчиков соединены с приводной рукояткой, отличающееся тем, что, с целью повышения надежности, поворотные элементы задатчиков образуют с корпусом зад атчиков по крайней мере три полости, связанные соответственно с входом и выходами задатчиков, при этом поворотные элементы задатчиков полнены с двумя сообщающимися каналами, расположенными под углом друг к другу (Л и соединенными с полостями, причем входы задатчика опускания стрелы соединены с соответствующими выходами задатчика подъема стрелы, а выход задатчика опускания стрелы соединен с атмосферой. 4 СО О Х) со
16
J7
36
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления грузоподъемным средством | 1980 |
|
SU893824A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
