Изобретение относится к области пакетоформирующих и пакеторазборных манипуляторов предназначенных для формирования и разборки пакетов штучных грузов, -например стопы листовых изделий.
Цель изобретения - расширение технологических возможностей путем манипулирования с изделиями из различ- toiix материалов и повышение надежности работы.
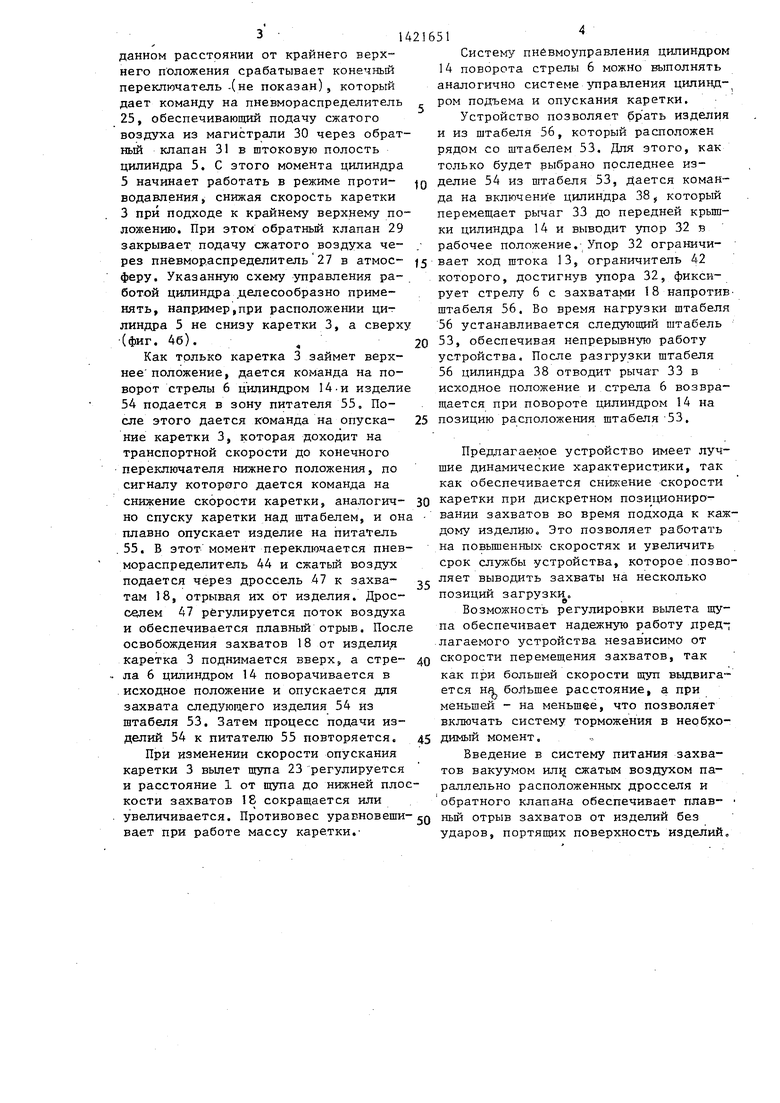
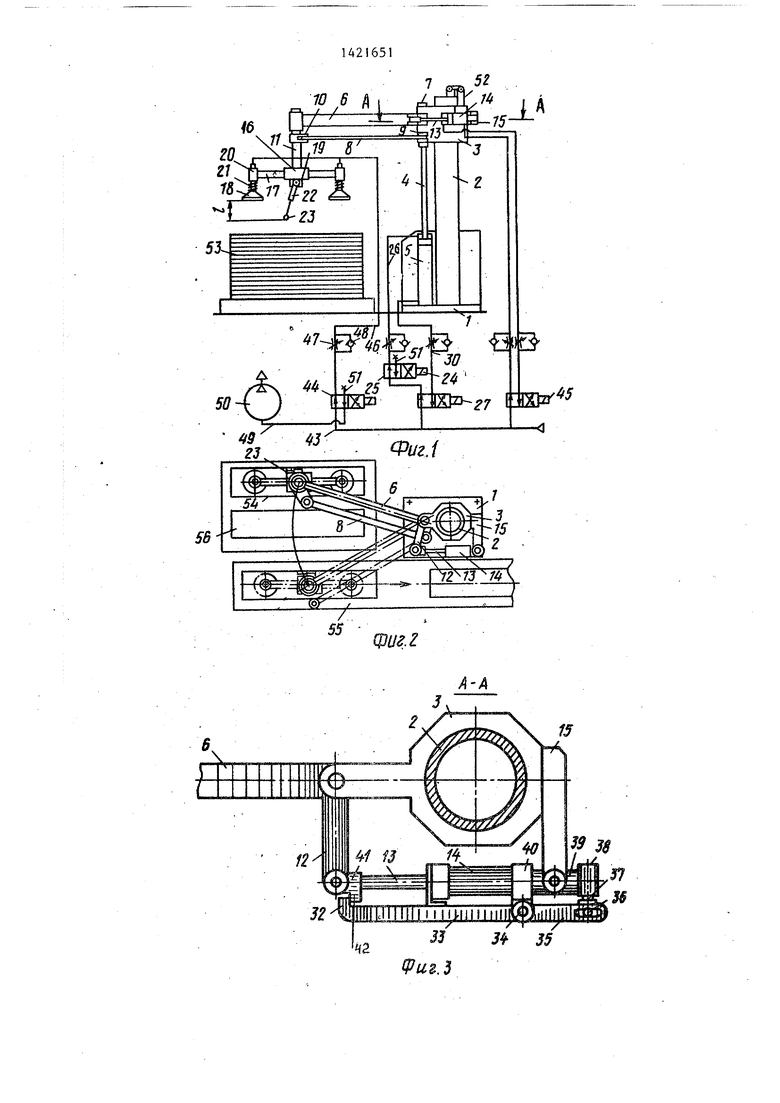
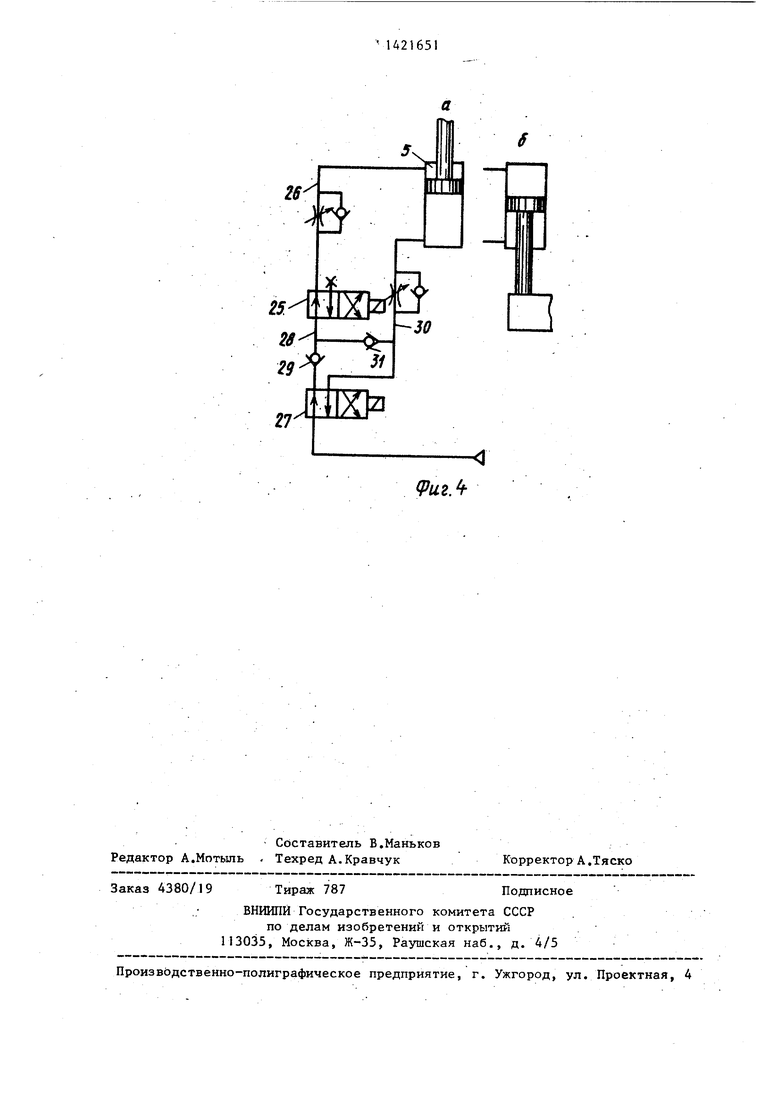
На фиг. 1 изображено устройствоj t пневматической схемой, общий вид; на фиг, 2 то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. А - пневмосхема управления си- |1овым цилиндром.
i Устройство для формирования и раз- уборки пакетов штучных грузов состоит из опоры 1 с вертикальной щтангой 2, ра которой установлена подвижная каретка 3, связанная со штоком 4 цилинд ра 5 и снабженная поворотной стрелой 6, щарнирно смонтированной на, оси 7. Параллельно стреле 6 расположена тя- 8, соединенная одним концом с кронштейном 9 каретки 3, а другим - кронштейном 10, закрепленным на по- воротной оси 11J .установленной на конце стрелы 6. С поворотным рычагом 12 стрелы 6 связан шток 13 цилиндра 14 поворота стрелыJ смонтированного шарнирно на кронштейне 15 На оси.11 закреплен корпус 16 со штангой 17, снабженной захватами 18 и датчиком 19 вертикального положения з.ахватов 18. Между захватами 18 и направляющими 20 установлены пружины 21, а датчик 19 вьтолнен с поворотным рычагом 22, в котором имеется с возможностью регулирования относительно захватов 18 гзуп 23. Датчик 19 связан через систему программного управления с электро- магнитом 24 дополнительного пневмо- распределителя 25, который установлен в магистрали 26,, связывающей штоко- вую полбсть цилиндра 5 с управляющим пневмораспределителем 27„
На участке 28 магистрали 26 между пневмораспределителями 27 и 25 смонтирован обратный клапан 29, свободно пропускающий воздух к цилиндру 5. Участок 28 соединен с магистралью 30 Связывающей бесштоковую полость цилиндра 5 с управляющим пневмораспре- делителем 27, другим обратным клапаном 31, свободно пропускающим воздух
в магистраль 26 штоковой полости цилиндра.
Откидной упор 32 смонтирован на конце рычага 33, который установлен на оси 34 цилиндров 14 и связан свободным концом 35 с пальцем 36 штока 37 цилиндра 38, закрепленного на кронштейне 39 крьшки 40 цилиндра 14 поворота стрелы. На штоке 37 закреплена серьга 41 с ограничителем 42. Серьга 41 шарнирно связана с рычагом 12.
К общей питающей магистрали 43 подключены пневмораспределители 44 и 45. Пневмораспределитель 45 связан с цилиндром 14, а пневмораспределитель 44 - с захватами 18.
В магистраль 46, связывающую захваты 18 с пневмораспределителем 44 вакуума и сжатого воздуха,вмонтированы дроссель 47 и обрат.ньй клапан 48. К пневмораспределителю 44 подключен через магистраль 49 вакуумный насос 50, Пневмораспределители 25 и 44 снабжены заглушками 51. Каретка 3 связана тросом 52 с противовесом, установленным в штанге 2. , Устройство работает следующим образом.
Из штабеля 53 изделия 54 подаются на питатель , который перемещает изделия вправо. Для захвата изделий 54 цилиндр опускает каретку 3 вниз с транспортной скоростью. Как только щуп 23 коснется штабеля 53, датчик 19 посылает сигнал в систему программного управления, которая дает команду на электромагнит 24, переключающий направление потока сжатого воздуха. При этом подача сжатого воздух в штоковую полость цилиндра 5 прекращается и она соединяется с атмосферой, обеспечивая снижение скйрости каретки 3 и соответственно захватов 18j которые плавно опускаются на штабель 53.
Пружину 21 обеспечивак|т дополни- тельную амортизацию. После опускания захватов дается команда на пневмораспределитель 44, который соединяет магистраль 46 через обратный- клапан 48 с вакуумным насосом 50, и захваты 18 присасывают изделие 54. В этот мо мент включается пневмораспределитель 27 и сжатый воздух подается по магистрали 30 в бесшуоковую полость ци- линдра 5, обеспечивал подъем каретки 3 вверх с рабочей скоростью. На за10
15
25
данном расстоянии от крайнего верхнего положения срабатывает конечный переключатель -(не показан) , который дает команду на пневмораспределитель 25, обеспечивающий подачу сжатого воздуха из магистрали 30 через обратный клапан 31 в штоковую полость цилиндра 5. С этого момента цилиндра 5 начинает работать в режиме противодавления, снижая скорость каретки 3 при подходе к крайнему верхнему положению. При этом обратньй клапан 29 закрывает подачу сжатого воздуха через пневмораспределитель 27 в атмосферу. Указанную схему управления работой цилиндра .целесообразно применять, напрлмер,при расположении цилиндра 5 не снизу каретки 3, а сверху (фиг. 4б).
Как только каретка 3 займет верхнее положение, дается команда на поворот стрелы 6 цилиндром 14-и изделие 54 подается в зону питателя 55, После этого дается команда на опускание каретки 3, которая доходит на транспортной скорости до конечного переключателя нижнего положения, по сигналу которого дается команда на снижение скорости каретки, аналогично спуску каретки над штабелем, и она плавно опускает изделие на питатель .55. В этот момент переключается пневмораспределитель 44 и сжатый воздух подается через дроссель 47 к захватам 18, отрывня их от изделия. Дрос- 47 регулируется поток воздуха и обеспечивается плавный отрыв. После освобождения захватов 18 от изделия каретка 3 поднимается вверх, а стре- ла 6 цилиндром 14 поворачивается в исходное положение и опускается для захвата следующего изделия 54 из штабеля 53. Затем процесс подачи изделий 54 к питателю 55 повторяется.
При изменении скорости опускания каретки 3 вылет щупа 23 регулируется и расстояние 1 от щупа до нижней плоскости захватов 18 сокращается или
30
35
40
45
10
15
25
20
21651
Системз пнёвмоуправления цилиндром 14 поворота стрелы 6 можно выполнять аналогично системе управления цилинд- ром подъема и опускания каретки.
Устройство позволяет бр ать изделия и из щтабеля 56, который расположен рядом со штабелем 53, Для этого, как только будет выбрано последнее изделие 54 из штабеля 53, дается команда на включени е цилиндра 38 который перемещает рычаг 33 до передней крьш- ки цилиндра 14 и выводит упор 32 в рабочее положение.- Упор 32 ограничивает ход штока 13, ограничитель 42 которого, достигнув упора 32, фиксирует стрелу 6 с захватами 18 напротив- штабеля 56. Во время нагрузки штабеля 56 устанавливается следуюш1гй штабель 53, обеспечивая непрерывную работу устройства. После разгрузки штабеля 56 цилиндра 38 отводит рычат 33 в исходное положение и стрела 6 возвращается при повороте цилиндром 14 на позицию расположения штабеля 53.
0
5
0
5
Предлагаемое устройство имеет лучшие динамические характеристики, так как обеспечивается снижение -скорости каретки при дискретном пози циониро- вании захватов во время подхода к каждому изделию. Это позволяет работать на повьш1енных скоростях и увеличить срок службы устройства, которое позволяет выводить захваты на несколько позиций загрузки.
Возможность регулировки вылета щупа обеспечивает надежную работу предлагаемого устройства независимо от скорости перемещения захватов, так
как при большей скорости щуп вьздвига™ ется на большее расстояние, а при меньшей - на меньшее, что позволяет включать систему торможения в необходимый момент.
Введение в систему питания захватов вакуумом или сжатым воздухом параллельно расположенных дросселя и обратного клапана обеспечивает плав- 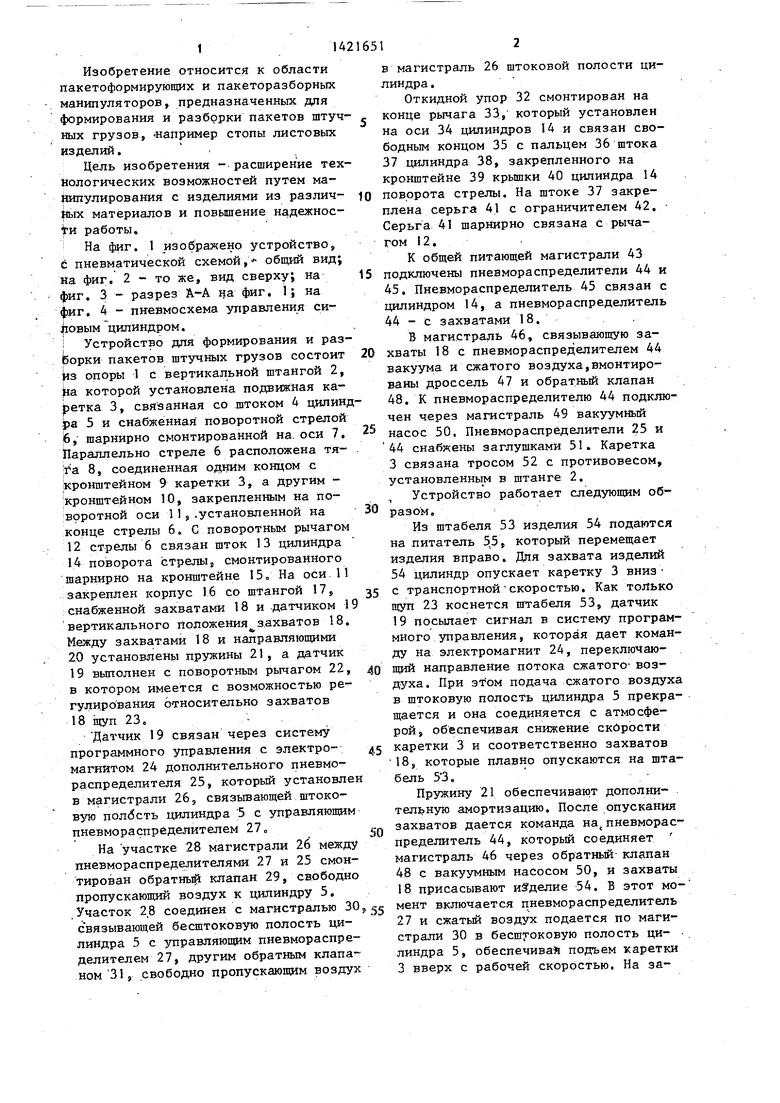
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2037677C1 |
| Сверлильная головка | 1979 |
|
SU918063A2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА В РАБОЧУЮ ЗОНУ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 1991 |
|
RU2008120C1 |
| ПОЛУАВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ИНЖЕКЦИОННЫМ ФОРМОВАНИЕМ ГАЗИФИЦИРУЕМЫХ МОДЕЛЕЙ | 2006 |
|
RU2314198C1 |
| Погрузочно-транспортная машина | 1990 |
|
SU1767197A1 |
| ПРИВОД РЕЕЧНОГО ДОМКРАТА | 2022 |
|
RU2813758C1 |
| СТАНОК ШЛИФОВАЛЬНЫЙ ШИРОКОЛЕНТОЧНЫЙ | 2001 |
|
RU2182073C1 |
| УСТАНОВКА ДЛЯ ПРЕССОВАНИЯ СТРОИТЕЛЬНЫХ ИЗДЕЛИЙ | 1994 |
|
RU2100191C1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ИНЖЕКЦИОННЫМ ФОРМОВАНИЕМ ГАЗИФИЦИРУЕМЫХ МОДЕЛЕЙ | 2006 |
|
RU2330756C1 |
увеличивается. Противовес уравновеши- Q ньй отрыв захватов от изделий без
вавт при работе массу каретки.ударов, портяш х поверхность издел
ударов, портяш х поверхность изделий.
7 Рйа
o 6 /) t /i-./4 . д 7 -1±г-1 № ,c-i.
7
ж
/ 55
е
ч X
llilllciliTi niiminitiiijii jl,ll|m
i{a
Л Jf J5 J
26
27
Редактор А.Мотьшь
Составитель В,Маньков Техред А.Кравчук
Заказ 4380/19
Тираж 787
ВНИИПЙ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
fPuz.
Корректор А .Тяско
Подписное
| Подъемно-передающее устройство | |||
| Проспект .фирмы Карл Ляйбфрид ГМБХ, 1969, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
