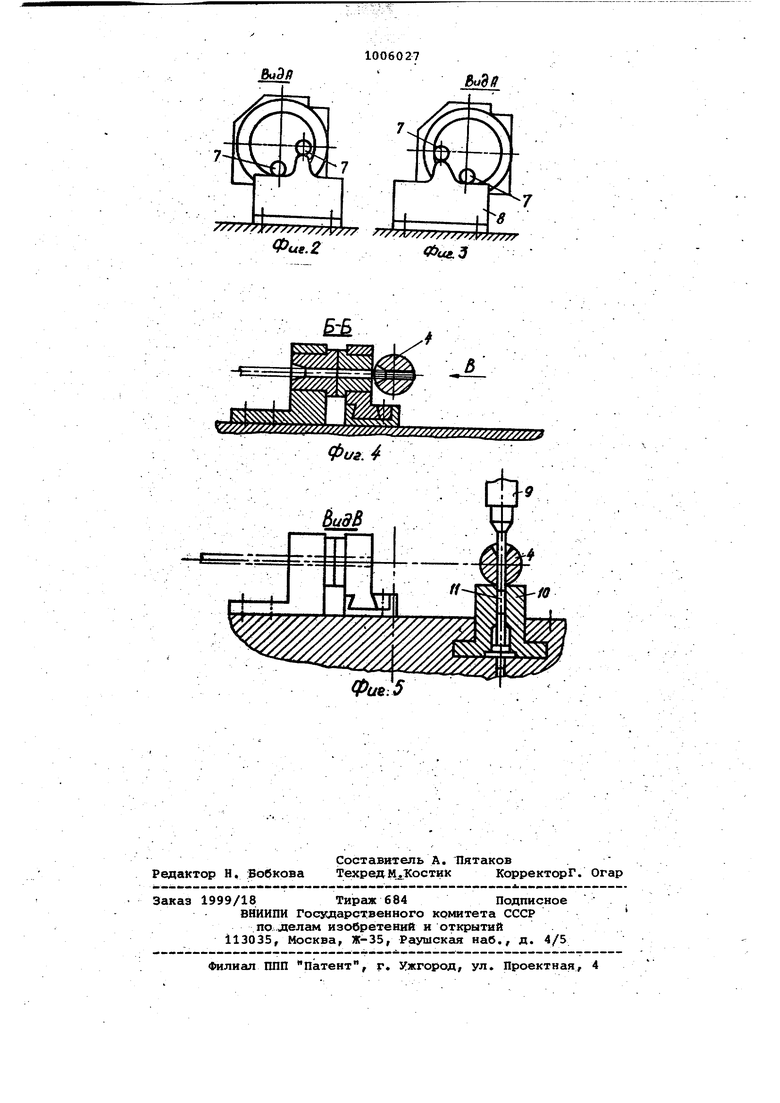
Изобретение относится к кузнечно прессовому оборудованию и может быт испапьзовано в прессах о вертикальным движением ползуна для.изготовления, метизных изделий методом холодной.высадки. Осуществление метода холодной высадки в вертикальном положении требует оборудования для переноски за. готовки с одновременным поворачиванием ее из горизонтального в вертикальное положение до момента совпадения с осью загрузочной матрицы. Известен холодно-высадочный автомат, содержащий механизм переноса заготовок, выполненный в виде приводных одноплечих рычагов, установленных с возможностью перемещения по замкнутым эллиптическим траекториям в плоскости, параллельной основанию рамы СIJ Известно также устройство для переноса заготовок меяоду позициями высадочного автоматам, содержащее . ;смонтированную на основании ползуш ку с привод-ом возвратно-поступательного перемещения ,2 . Однако известные механизмы не могут быть использованы при вертикал нЬм способе : олодной высадки, так как.они не способны переносить заготовку из горизойтального в вертикаль ное положение. : Целью изобретения является расширение технологических возможностей прессового оборудования общего назна чения, работающего с вертик.альным движением ползуна, для производства метизных изделий, в том числе машиНо строительных деталей мелких размеров со сложными профилями разной конструкции и высокой точности. Поставленная цель достигается тем что механизм переноса заготовок,содержащий смонтированную на основании ползушку с захватными органами, связанную с приводом возвратно-поступательного перемещения, снабжен устрой ством поворота заготовки в вертикаль ной плоскости, выполненным в виде за крепленного на ползушке поворотного шпинделя, несущего на одном конце за ватный орган для заготовки и на другом - фланец с двумя кулачками, а, та же неподвижного копира, взаимодей.ствующего С кулачками.. На фиг. 1 изображен механизм пере носа заготовок, план; ,на фиг. 2 - ви А на фиг.1 в одном из положений шпин деля; на фиг. 3 - то же, в другом по лЬжении шпинделя; на фиг. 4 - сечение Б-Б на фиг.If на фиг. 5 - вид В на фиг.4. . Механизм переноса заготовок состоит из направляющей 1, установленно на неподвижной плите 2 пресса, на направляющей 1 закреплено шпиндельное устройство 3, на одном из концов которого смонтирован цанговый захват 4. Направляющая 1 получает возвратно-поступательное движение от копира (не показан), закрепленногр на . неподвижной плите 2 пресса на величину шага расположения захватоц 5 для переноса заготовок из одной по-, зиции в другую, одновременно .вместе с направлякяцей перемещается и цанговый захват 4. На другом конце шпинделя 3 закреплен диск б с двумя кулачками 7, взаимодействующими с кодиром 8, закрепленным на неподвиж ной плите 2 для поворота цанги на 90 из горизонтального в вертикальное по ожение. В верхней плите блока пуан-. сонов пресса .(не показан) закреплен пуансон 9, выталкивающий из цанговог.о захвата 4 в загрузочную матгрицу 10 заготовку 11. Устройство работает следующим iобразом. . При вертикальном возвратно-поступательном движении ползуна пресса посредством копира,закрепл.енного к верхней части плиты устройства, осуществляется горизонтальное возвратно-поступательное движение направляющей 1, несущей на себе шпиндельное устройство .3 и захваты 5. В момент нахождения отверстия цангового захвата 4 в горизонтальном положении механизм устройства (не показан) вталкивает-в цанговый захват 4 заготовку. При перемещении;: направляющей 1 шпиндель получает от кулачков 7, взаимодействующих с копиром 8, вращательное движение на величину 90°, и в этом случае заг.отовка устанавливается в одну ось в вертикальном .положении с загрузочной матрицей 10. В этот момент за счет вертикального опускания ползуна пресса вниз заготовка 11 вталкивается пуансоном 9 в загрузочную матрицу 10. При следующем повторном цикле заготовка вталкивается в захват 5 и переносится при движении направляющей 1 на другую позицию матрицы.. Таким образом, происходит перенос заготовки из одной матрицы в другую до завершения технологического цикла в изготовлении детали. Устройство позволяет производить метизные изделия, в том числе машиностроительные детали мелких размеров со сложным профилем разной конструкцци и высокой точности с переносом заготовок из горизонтального в вертикальное положение загрузки, , При этом расширяются технологические , возможности прессового оборудования, работающего с вертикальным движением ползуна.
7
Bu9ff
U. 3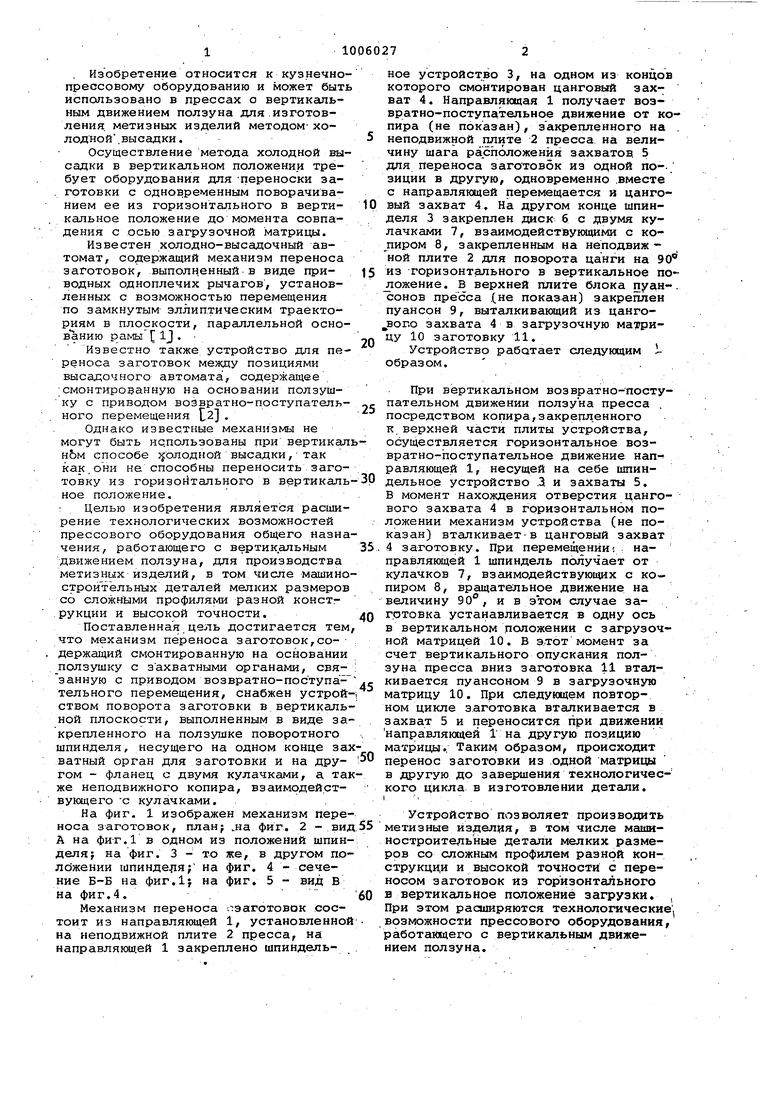
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| УСТРОЙСТВО для ПЕРЕНОСА ЗАГОТОВОК МЕЖДУ ПОЗИЦИЯМИ ВЫСАДОЧНОГО АВТОМАТА | 1972 |
|
SU328977A1 |
| Устройство для высадки | 1981 |
|
SU996027A1 |
| Автомат для двусторонней высадки | 1979 |
|
SU1107945A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Устройство переноса заготовок к многопозиционным штамповочным автоматам | 1988 |
|
SU1503969A1 |
| Устройство для высадки трубчатых заготовок | 1986 |
|
SU1393518A1 |
| Автооператор для подачи плоских заготовок в обрабатывающую машину | 1988 |
|
SU1539082A1 |
| Устройство для подачи штучных заготовок в рабочую зону штампа | 1980 |
|
SU912353A1 |
| МНОГОПОЗИЦИОННЫЙ ХОЛОДНО-ВЫСАДОЧНЫЙ АВТОМАТ | 1973 |
|
SU378278A1 |
МЕХАНИЗМ ПЕРЕНОСА ЗАГОТОВОК МЕЖДУ ПОЗИЦИЯМИ МАТРИЦ, содержащий смонтированную на основании-полэушку с захватными органами, связанную с приводом возвратно-поступательного перемещения, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен устройством поворота заготовок в вертикальной плоскости, выполненным в виде закрепленного на ползушке поворотного шпинделя, несущего на одном конце захватный орган для заготовки и на другом - фланец с двумя кулачками, а также неподвижного копира, взаимодействующего с кулачками.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ХОЛОДНО-ВЫСАДОЧНЫЙ АВТОМАТ | 0 |
|
SU315332A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для ПЕРЕНОСА ЗАГОТОВОК МЕЖДУ ПОЗИЦИЯМИ ВЫСАДОЧНОГО АВТОМАТА | 0 |
|
SU328977A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
