Изобретение относится к оптической Промышленности и может быть использовано при шлифовании и полировании сферических и плоских поверхностей оптических изделий.
Известен станок-для обработки сферических поверхностей, содержа1 й станину, несущую шпиндель изделия, каретку со шпинделем инструмента, установленную с возможностью перемещения оси шпинделя инструмента по конической поверхности с вершиной, совпадающей с центром обрабатываемой, сферы,, причем каретка со станиной связана сферическим шарниром, ось качания которого закреплена на станине и каретк и установлена на-станине с возможностью изменения угловрго положения шпинделя инструмента 1 3. . .,
Однако на данйом станке нельзя о рабатывать поверхности с радиусом в диапазоне от нуля до бесконечности ,, так как оси сферического шарнира материализованы и конструктивно не могут быть вынесены за габариты станка при обработке сфер большого радиуса. . Цель изобретения г- расширение техноло.гических возможностей станка.
Поставленная цель достигается тем, что в станке, для обработки сфрических поверхностей, содержащем станину и установленные на ней шпиндель изделия, каретку, связанную со станиной шарниром, ось которого пер1пендикулярна оси шпинделя изделия и пересекает ее, редуктор и силовую головку с механизмом ее перемещения последний выполнен в виде двух шарнирно закрепленных на ней с возможностью синхронного плоскопараллельного перемещения шатунов, кинематически связанных между собой и с редуктором с помощью кривошипов, при этом редуктор устайовлен на каретке с возможностью перемещения в направлении, перпендикулярном оси шарнира, связывающего каретку со станиной.
на чертеже изображена кинематическая схема станка.
Станок содержит -станину 1, несущий шпиндель 2, редуктор 3, каретку 4 -с силовой головйой 5 с шаровым повсСцком 6. Силовая головка 5 установлена с возможностью перемещения ее оси А по конической поверхности с вершиной О , совпадающей с центром обрабатываемой сферы. Станина 1 и каретка 4 соединены ме)аду собой посредством шарнира 7 с возможностью изменения углового положения силовой головки 5 по отношению к шпинделю 2.
Для перемещения оси Д силовой головки 5 пд конической траектории использован механизм, содержащий шатуны 8 и 9 и кривошипы 10 и 11. Шат ны установлены с возможностью синхронного плоскопараллельното перемещения и связаны посредством универ- . - сальных шарнирнов 12 и 13 с силовой головкой 5. Кривошипы 10 и 11 связаны с редуктором 3, установленным .на каретке 4 с возможностью перемещения его перпендикулярно оси Б шар10 нира 7, пересекающей ось шпинделя 2 и перпендикулярной ей. Шпиндель 2 установлен с возможностью вращения от привода 14, через ременную передачу 15.
Движение оси силовой головки 5 по конической или цилиндрической траектории осуществляется от привода 16 через ременную передачу 17, червячный редуктор 3, кривошипы 11 и 10, шатуны 8 и 9 и универсал1/ные шарни.ры 12 и 13.
Регулированием вe feчины радиуса кривошипов 10,. 11 обеспечивается . требуемая траектория оси силовой го ловки 5 в зависимости от формы обрабатываемой поверхности. При обработке сферических- поверхностей ось силовой головки совершает движение по конической траектории,при обработке плоских поверхностей - по ци0 линдрической.
Станок работает следующим обра43ОМ. ....,
поворотом каретки 4 за счет винта 18 устанавливают необходимый угол oL между осями шпинделя 2 и силовой головки 5. Перемещением редук- . тора 3 с силовой-, голов кой 5 за счет винта 19 осуществляют пересечение оси А силовой головки 5 с центром
0 обрабатываемой сферы. Кривошипы 10 и 11 настраивают в зависимости от формы обрабатываемой поверхности на -требуемый радиус соответственно посредством винтов 20 и 21. Силовую
5 головку 5 перемещают до касания инструмента с изделием и включают станок. Вращение от привода 14 через ременную передачу 15 передается на шпиндель 2, а от привода 16 через ремён0 ную передачу 17, редуктор 3, кривошипы 11 и 10, шатуны 8 и 9, универсальные шарниры 12 и 13 - на силовую головку 5. Шатуны 8 и 9 совершают синхронное плоскопараллельное
, -вращение с радиусгьми кривошипов 10
5 и 11.
Происходит обработка поверхности изделия. При этом, если радиусы кривошипов 10 и 11 ие равны, то ось А силовой головки 5 совершает движе0 ние по конической траектории с
углом ( при вервтне конуса. Если . радиусы кривошипов 10 и 11 равны, то ось силовой головки 5 совершает движение пО цилиндрической траекто5 Рии.
310476654
Таким образом, на предлагаемом го радиуса,что расширяет
станке 1уюжно обрабатывать поверхнос- технологическиевозьложности станти оЯтйческих изделий любо- ка..
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для обработки сферических поверхностей | 1980 |
|
SU906673A1 |
| Загрузочное устройство | 1976 |
|
SU592577A1 |
| Станок для обработки сферических поверхностей | 1986 |
|
SU1324828A1 |
| Полировальный станок | 1981 |
|
SU948632A1 |
| Станок для шлифования и полирования оптических деталей | 1987 |
|
SU1449327A1 |
| Устройство для обработки сферических поверхностей | 1983 |
|
SU1093404A1 |
| Полуавтоматический станок для механической обработки полусферических изделий из взрывчатых веществ | 1967 |
|
SU1841277A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ КРИВОЛИНЕЙНЫХ КАНАВОК | 1991 |
|
RU2077971C1 |
| Устройство для обработки сферических поверхностей | 1983 |
|
SU1094672A1 |
| Станок для асферизации оптических деталей | 1977 |
|
SU680862A1 |
. СТАНОК ДЛЯ ОБРАБОТКИ СФЕРИ-.. .ЧЕСКИХ ПОВЕРХНОСТЕЙ содержащий станину и установленные на ней ишиндель изделия, каретку, связанную со станиной шарниром, ось которого перпендикулярна оси шпинделя изделия и пересекает ее, редуктор и силовую головку с механизмом ее перемещения, отличающийся тем, что, с целью расширения технологических возможностей, механизм перемещения силовой головки выполнен в виде двух шарнирно закрепленных на ней с возможностью синхронного плоскопараллельного перемещения шатунов, кинематически связанных между собой и с редуктором с помощью кривошипов, при этом редуктор установлен на каретке с возможностью перемещения в направлении, перпенди.кулярном оси шарнира, связывающего каретку со станиной. (Я rf 6 tO g 20 / I I./-4: Ч o O5 сл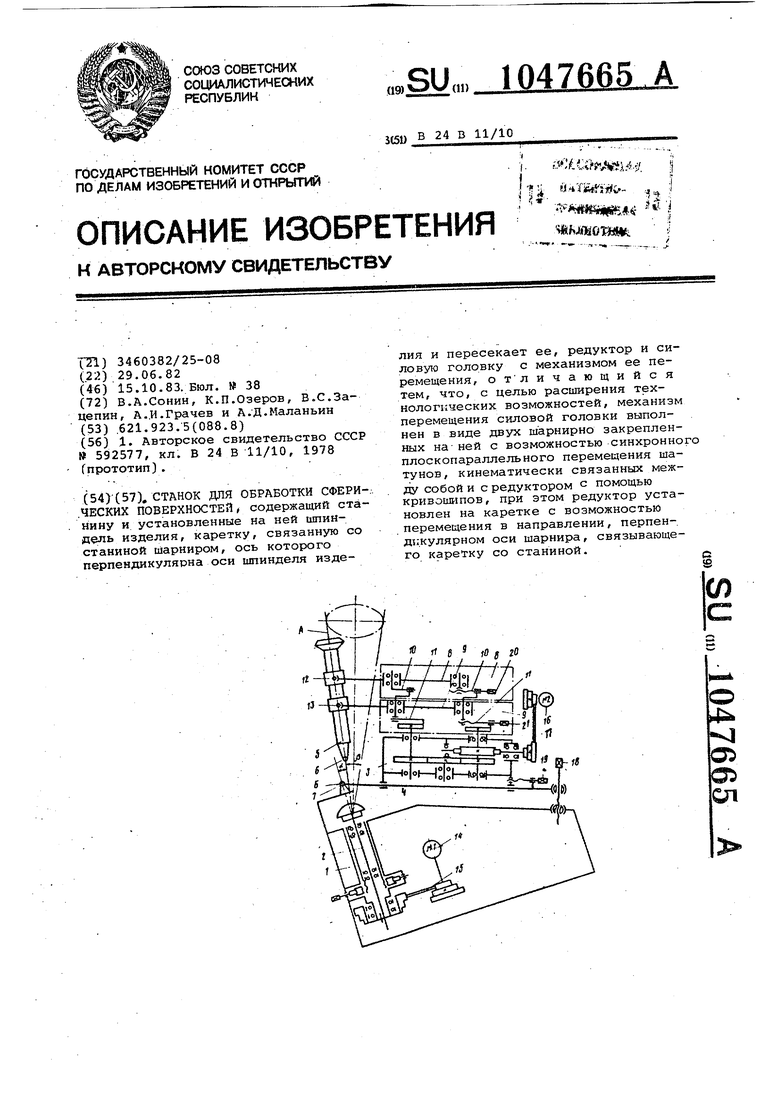
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Загрузочное устройство | 1976 |
|
SU592577A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
