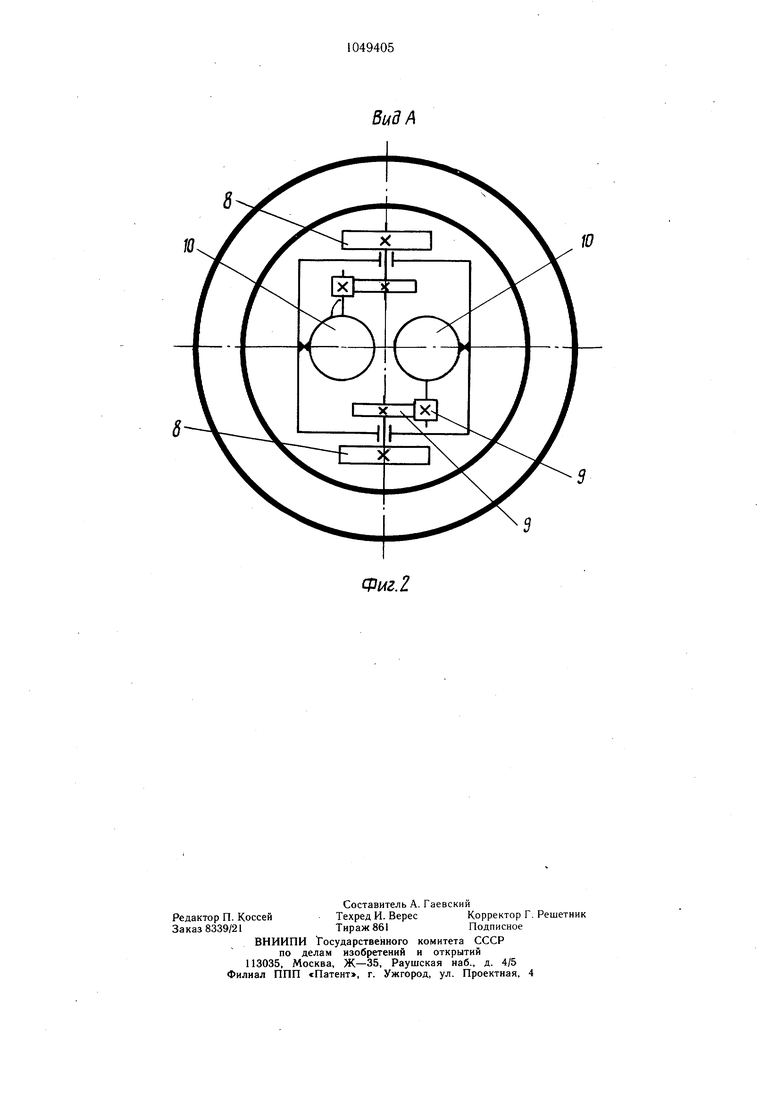
Изобретение относится к подъемно-транспортной технике, а также может быть использовано в области робототехники, и предназначено для захвата и манипулирования штучными объектами с гладкими плоскими поверхностями (листовые материалы и т.п.). Известно вакуумное захватное устройство, содержащее корпус с полостью и уплотнительную манжету, образующую с поверхностью захватываемого груза вакуумную камеру 1. Для изменения положения объекта в пространстве устройство снабжено по крайней мере двул-гя силовыми пневмоцилиндра.ми, кор пуса которых шарнирно закреплены на источнике вакуума, а штоки шарнирно соединены с корпусом захвата. Однако известное устройство не позволяет компенсировать перекосы объекта относительно вакуу.мной камеры, возникающие вследствие его эксцентричного захвата; в процессе манипулирования положение объекта в пространстве определяется положением вакуумной камеры, что существенно ограничивает зону обслуживания .манипулятора или автопогрузчика. Так, напри.мер,конструкция и габаритные размеры вакуумного захвата не позволяют вносить объекты манипулирования в щелевую рабочую зону технологического оборудования, в узкую полость штампа и прочее. Далее для обеспечения локального плоскопаралле.тьного перемещения объекта в пространстве необходимо использовать специальные приводы манипулятора или автопогрузчика. При это.м вместе с грузом перемещаются и большие массы конструкции манипулятора или автопогрузчика, что является энергетически нецелесообразным. Цель изобретения - расширение функциональных возможностей вакуумного грузозахватного устройства путем обеспечения возможности ориентирования захваченного объекта относительно вакуумной камеры. Указанная цель достигается теМ|что вакуумное захватное устройство, содержащее корпус с полостью, и уплотнительную манжету, образующую с поверхностью захватываемого груза вакуумную камеру, снабжено размещенной в полости корпуса поворотной платформойсдвумя раздельными приводными роликами, закрепленными на ней с воз.можностью контактирования с грузом и фиксатором ее положения относительно оси, перпендикулярной поверхности груза. На фиг. 1 представлена компоновочнокинематическая схема предлагае.мого вакуумного грузозахватного устройства; на фиг. 2 вид А на фиг. 1. Вакуумное грузозахватное устройство содержит несущую конструкцию 1, на. которой закреплена вакуумная камера 2 и пневмоцилиндр 3, соединенный с пневмосистемой 4. В центре несущей конструкции 1 установлен вал-шестерня 5, который совместно со щтоком-рейкой 6 пневмоцилиндра 3 образуют шестеренно-реечную передачу. На валу-щестерне 5 консольно закреплена платформа 7, содержащая два ролика 8 из материала, обладающего высоким коэффициентом трения скольжения при работе в паре с другими материалами, зубчатые передачи 9 и электродвигатели 10. Вакуумная камера 2 и.меет уплотнение 11, выполненное из .материала, обладающего низким коэффициентом трения скольжения при работе в паре с другими материалами, и соединена с вакуумной систе.мой 12. Устройство работает следующим образом. Манипулятор либо автопогрузчик обеспечивает соприкосновение уплотнения 11 вакуумной камеры 2 с гладкой поверхностью объекта. После этого вакуумная система 12 создает в вакуумной камере 2 разрежение, вследствие чего уплотнение 11 деформируется и ролики 8 прижимаются к поверхности объекта. При этом сила трения между по-верхностью объекта и роликами 8 выше, че.м сила трения .между поверхностью объекта и уплотнением 11 вакуумной ка.меры 2. Ориентация груза производится путем вращения роликов 8 от электродвигателей 10 через зубчатые передачи 9. В процессе ориентации объект пере.мещается относительно вакуумной камеры 2. Для изменения направления ориентации объекта электродвигатели 10 отключаются. и пневмоцилиндр 3 с помощью штока-рейки 6 и вала-шестерни 5 разворачивает поворотную платформу 7 на 90°. Дальнейшая ориентация объекта по другой координате осуществляется так, как описывалось. Управление ориентации объекта осуществляется операторо.м или системой авто.матического управления. Использование в грузозахватном устройстве поворотной платформы с роликами, имеющими раздельные приводы, позволяет расширить функциональные воз.можностк существующих моделей манипуляторов, промышленных роботов и автопогрузчиков, так как позволяет производить компенсирование перекосов груза относительно схвата, возникаюших вследствие эксцентричного захвата груза, что повышает надежность работы устройства.
8
Ю
BLfdA
Ю
Фиг. 2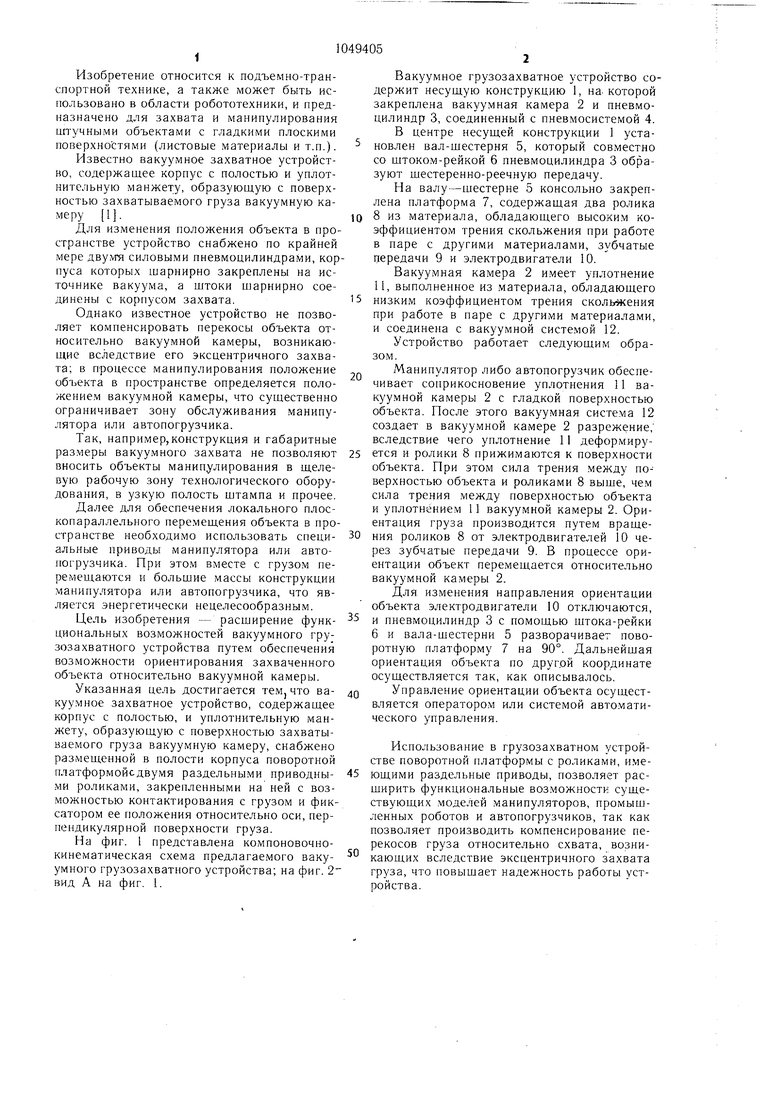
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНЫЙ ЗАХВАТ | 1992 |
|
RU2050255C1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1993 |
|
RU2035376C1 |
| Вакуумная грузозахватная траверса | 1979 |
|
SU903275A1 |
| Установка для резки листового материала | 1987 |
|
SU1433661A2 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| Вакуумный захват | 1986 |
|
SU1393635A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Вакуумное захватное устройство | 1981 |
|
SU1030292A1 |
| Грузозахватное устройство | 1989 |
|
SU1717520A1 |
| Грузозахватное устройство | 1990 |
|
SU1736899A1 |
ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус с полостью и уплотнительную манжету, образующую с повер.чностью захватываемого груза вакуумную камеру, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено размещенной в полости корпуса поворотной платформой с двумя раздельными приводными роликами, закрепленными на ней с возможностью контактирования с грузом и фиксатором ее положения относительно оси, перпендикулярной поверхности груза. S сл 4 со 4 О СП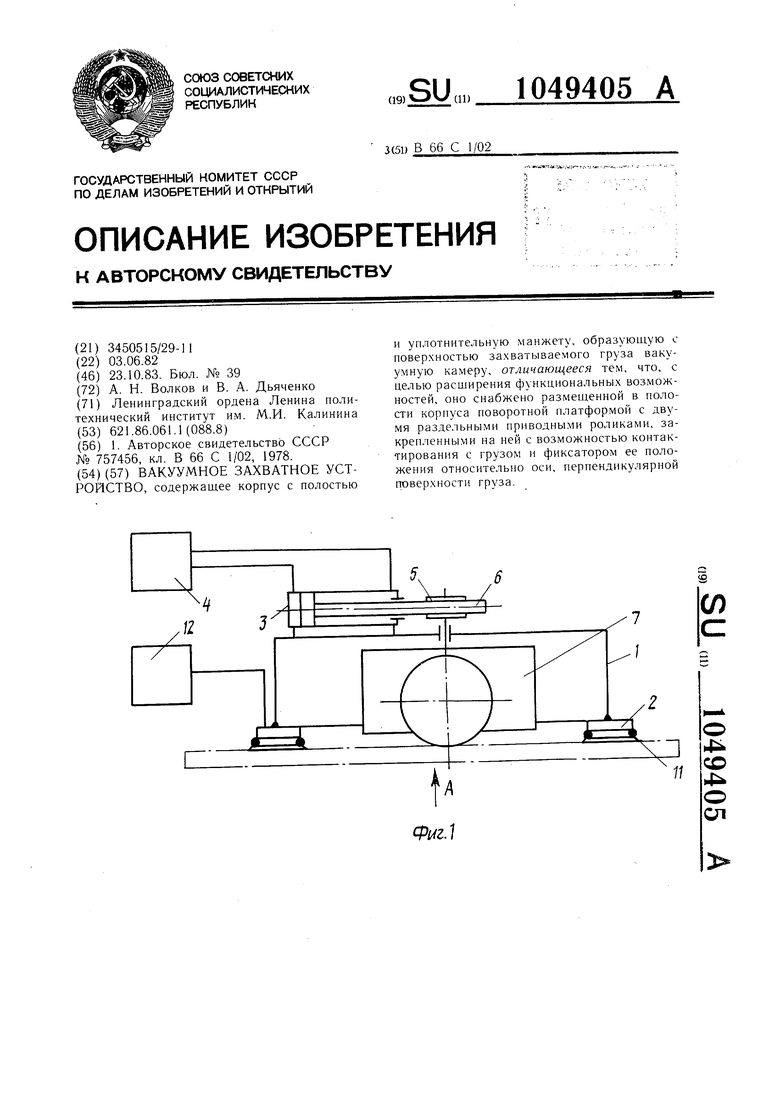
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 757456, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
