/f ucfTJowuKy 6oKt/t//ia
-т:
-73 /
а/77Н
11
о;
о: а СА: сг
6
Изобретение относится к машиностроению, а именно к вакуумным грузозахватным устройствам, и предназначе- j но для захвата как штучных, так и группы плоских деталей при их транспортировании манипуляторами в условиях промьшшенных предприятий, характеризуемых широко изменяющейся номенклатурой изделий.
Цель изобретения - расширение
функциональных возможностей за счет
I обеспечения возможности изменения по ложения манжет относительно друг друj га.
I На фиг.1 представлен вакуумный захват, разрез; на фиг. 2 - примерная схема установки манжет для одно- временного подъема группы деталей, i , Вакуумный захват содержит жесткий корпус 1, выполненный в виде плиты, I снабженной элементом 2 для соединения I С:подъемным механизмом, зластичные уплотняющие манжеты 3-6, снабженные : крепежными элементами 7, выполненны- ми в виде магнитов, образзтюгцих с кор- ; пусом 1 магнитную пару, в боковой поверхности каждой манжеты выполнен сквозной канал со штуцером 8 для со- i общения с источником вакуума и атмос- Iферой через запорные вентили 9-13. I Расстояние между крепежными эле- I ментами 7 и высота этих элементов принимаются из расчета обеспечения необходимой эластичности манжеты.
Вакуумный захват работает слецую;щим образом.
I Захват подготавливают в исходное положение в зависимости от выполня- |емой операции. На фиг. 2 показан при- |мер установки уплотняющих манжет и со юбщения камер с источником вакуума захвата, подготовленного для одновременного транспортирования группы деталей (показаны пунктиром) в виде кольца 14, диска 15 и обрези 16, при этом уплотняющие манжеты установлены на корпусе и зафиксированы магнитами с образованием из манжет 3 и 4 соответственно камер А и Б для удержания кольца 14, из манжеты 5 - камеры В для удержания диска 15, из манжет 6 - камер Г для удержания ogpe- зи 16. .Все камеры через сквозные каналы в боковой поверхности мантеж соединяют посредством гибких шлангов и запорных вентилей с источником вакуума. После выполнения указанных приемов вакуумный захват подготовлен для транспортных работ.
10
15
20
40 45936352
Для транспортирования захват устанавливают на поверхность деталей 14-16 и все камеры сообщают с источником вакуума, для чего, запорный вентиль 9 закрывают и открывают зайорные вентили 10-13, в результате камеры А, Б, В и Г сообщаются с источником вакуума.
.Под действием разности давлений снаружи и внутри камер детали удерживаются захватом при подъеме и транспортировании.
Для отпуска груза запорный вентиль 10 закрывают и открывают вентиль 9. При необходимости раздельного сброса обрези и деталей первоначально закрывают вентиль 13 и открьшают вентиль 9. При этом камеры Г, сообщенные с атмосферой, освобождают обрезь 16, а камеры А, Б и В, сообщенные с источником вакуума, продолжают удерживать детали 14 и 15. Для их освобождения закрывают вентиль 10 и открывают вентиль 13. Сообщенные с атмосферой камеры А, Б и В освобождают детали.
При повторении операции транспортирования аналогичных деталей установку манжет на корпусе не меняют, их положение сохраняется в результате действия магнитных пар.
Для захвата деталей другой формы и в зависимости от их расположения манжеты смещают относительно друг друга и при необходимости придают им определенную конфигурацию, повторяющую форму детали (например, фиг. 2, манжеты 3 и 4), при этом конфигурация манжеты сохраняется, благодаря действию магнитных пар.
Предложенная конструкция манжет позволяет устанавливать их практически на любых других захватных органах манипуляторов, например механических или магнитных, расширяя, тем самым, их функциональные возможности за счет использования рабоних свойств различных захватных органов, позволяя быстро перейти от .одной номенклатуры деталей к другой.
30
35
50
Формула изобретения
1. Вакуумный захват, содержащий корпус, на рабочей поверхности которого установлены эластичные уплотняющие манжеты, отличающий- с я тем, что, с целью расширения функциональных возможностей за счет
обеспечения возможности изменения положения манжет относительно друг друга, манжеты выполнены открытыми с обеих сторон и установлены на рабочей поверхности корпуса при помощи крепежных элементов, вьшолненных в виде магнитов, установленных в теле каждой манжеты и образзтощих с корпусом магнитную пару, при этом каждая манжета соединена с источником вакуума при помощи сквозного канала, выполненного на боковой поверхности
манжеты.
2. Захват по
п,
1, отлича
ющийся тем, что магниты, установленные в теле каждой манжеты, имеют возможность изменения положения относительно друг друга при изменении конфигурации манжеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Вакуумный захват | 1983 |
|
SU1105438A2 |
| Вакуумный захват | 1984 |
|
SU1284930A1 |
| Вакуумный захват | 1983 |
|
SU1102763A2 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1094831A1 |
| Вакуумный захват | 1982 |
|
SU1054269A1 |
| Вакуумное грузозахватное устройство | 1983 |
|
SU1209560A1 |
| Способ захвата и транспортирования грузов | 1986 |
|
SU1357222A1 |
| Вакуумный захват | 1989 |
|
SU1720979A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1993 |
|
RU2048418C1 |

Изобретение относится к области машиностроения, в частности к вакуумным грузозахватным устройствам. Целью изобретения является расширение функциональных возможностей за счет обеспечения возможности изменения положения эластичных уплотняюид х манжет относительно друг друга. Для этого эластичные уплотняющие манжеты 3-6 выполнены открытыми с двух сторон и крепятся к корпусу 1 при помощи магнитов 7. манжета соединена с источником вакуума при помощи сквозного канала со штуцером 8 через запорные вентили 9-13. Крепление манжет 3-6 при помощи магнитов 7 позволяет придавать им форму захватываемых деталей и менять их положение на корпусе 1 в зависимости от расположения деталей. 1 з.п. ф-лы, 2 ил.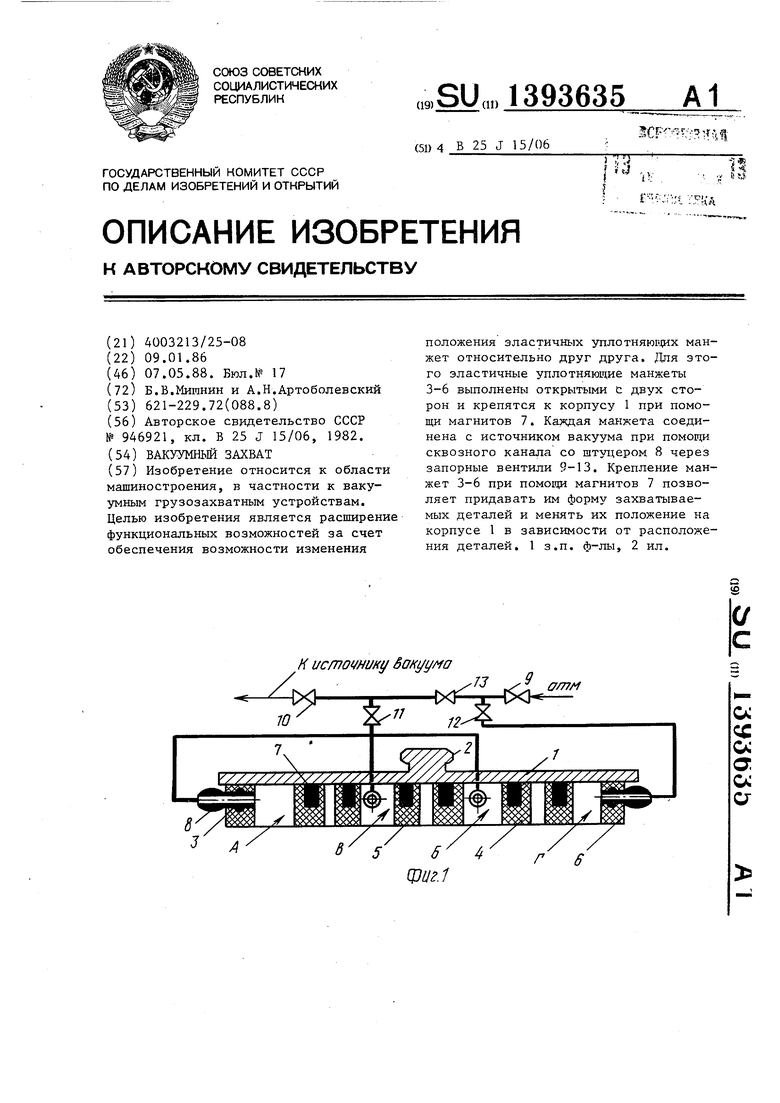
Атм.
| Вакуумный захват | 1980 |
|
SU946921A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
