Изобретение относится к автоматическому регу тированию, а именно,, к следящим системам и может быть использовано в любой отрасли техники, где требуется автоматически воспроизводить какую-либо величину, меняющуюся по произвольному закону. В частности, изобретение может быть использовано в металлорежущих станках с программным управлением для управления положением подвижного органа станка. Известны системы, в которых для повыщения точности применяется компенсация скоростной ошибки, что осуществляется путем формирования из сигнала задания скорости изменения задания, который и используется для компенсации сигнала обратной связи по скорости объекта регулирования. Это позволяет сделать ощибку регулирования независимой (инвариантной) от скорости изменения заданного положения 1. Однако для обеспечения точности следящей системы блок формирования скоростной компенсации требует специальной подстройки под конкретный привод, что усложняет настройку следящей системы и, кроме того, всегда существует опасность перекомпенсации системы при стремлении к точной настройке цепи компенсации. Кроме того, существенным недостатком этой системы является то, что крутизна характеристики тахогенератора не является постоянной величиной. Наиболее близким к изобретению является самонастраивающийся следящий привод, в котором коэффициент передачи цепи скоростной компенсации изменяется автоматически в зависимости от величины сигнала ошибки. В известном приводе блок формирования задания своим выходом соединен с прямым входом блока сравнения следящей системы, с прямым входом блока сравнения модели следящей системы, и с входом цепи компенсации (блока дифференцирования задания), выход блока сравнения соединен с входом преобразователя входной информации (регулятора положения), выход которого соединен с первым входом сумматора, выход сумматора соединен с входом привода, охваченного отрицательной обратной связью по скорости и кинематически связанного с объектом регулирования, с которым связан датчик положения, выход датчика положения соединен с инвертирующим входоМ блока сравнения следящей системы, выход цепи компенсации соединен с входом блока с переменным коэффициентом усиления, выход которого соединен с вторым входом сумматора, выход блока сравнения модели следящей системы соединен с входом модели, выход модели соединен с инверсным входом блока сравнения модели, выходы блока сравнения следящей системы и блока сравнения модели соединены соответственно с прямым и инверсным входами блока сравнения ощибок следящей системы и ее модели, выход блока сравнения ошибок соединен через блок масштабного коэффициента с управляющим входом блока с переменным коэффициентом усиления 2. Однако ошибка модели не может полностью скомпенсировать ошибку системы, так как невозможно создать идеальную модель. Поэтому на управляющий вход блока с переменным коэффициентом усиления, кроме «медленно меняющейся ошибки от параметрического возмущения, поступает и нескомпенсированная часть ошибки системы по управляющему и возмущающему воздействию. Цель изобретения - упрощение привода и повышение качества регулирования путем повышения эффективности самонастройки по параметрическим возмущениям при сохранении запаса устойчивости системы. Поставленная цель достигается тем, что в следящий привод, содержащий последовательно соединенные задатчик, первый блок сравнения, регулятор положения, сумматор второй блок сравнения, привод, подключенный к объекту управления, датчик положения объекта, выход которого подключен к второму входу первого блока сравнения, выход привода через датчик скорости соединен с вторым входом второго блока сравнения, выход задатчика через последовательно соединенные дифференциальное звено и усилитель с переменным коэффициентом соединен с вторым входом сумматора, введено апериодическое звено, вход которого соединен с выходом первого блока сравнения, а выход - с управляющим входом усилителя с переменным коэффициентом. На фиг. 1 приведена функциональная схема предлагаемого следящего привода; на фиг. 2 - зависимость коэффициента передачи блока с переменным коэффициентом усиления от сигнала на управляк)щем входе. Предлагаемый следящий привод (фиг. 1) содержит задатчик 1, выход которого соединен с входом дифференцирующего звена 2 и с прямым входом блока 3 сравнения. Выход блока 3 сравнения соединен с входом регулятора 4 положения, выход которого соединен с первым входом сумматора 5. Выход сумматора 5 соединен с входо.м привода 6. кинематически связанного с объектом 7 регулирования, с которым связан датчик 8 положения. Выход датчика 8 соединен с инвертирующим входом блока 3. Выход блока 2 соединен с входом усилителя 9 с переменным коэффициентом усиления. Выход усилителя 9 соединен с вторым входом сумматора 5. К выходу блока 3 подключен вход апериодического звена 10, выход которого подключен к управляющему входу усилителя. Выход привода б чеоез
датчик 11 скорости соединен с инвертирующим входом второго блока 12 сравнения.
Следящий привод работает следующим образом.
Сигнал задания 83 (фиг. 1) .с выхода задатчика 1 поступает на вход дифференциального звена 2, а также на прямой вход блока 3, где сравнивается с сигналом Soc фактического положения объекта 7 регулирования,, поступающим на инверсный вход блока 3 от задатчика 8 положения. На выходе блока 3 имеет место сигнал ошибки положения
д8 5з-3ьс.
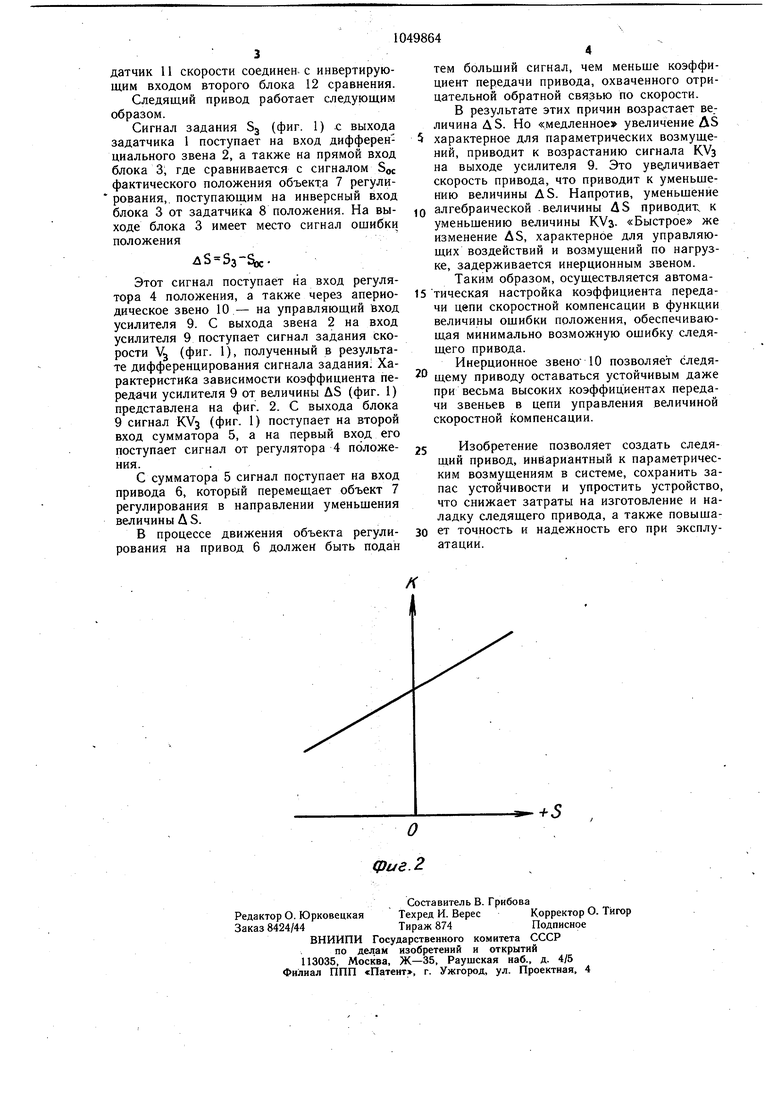
Этот сигнал поступает на вход регулятора 4 положения, а также через апериодическое звено 10 - на управляющий вход усилителя 9. С выхода звена 2 на вход усилителя 9 поступает сигнал задания скорости УЗ (фиг. 1), полученный в результате дифференцирования сигнала задания Характеристика зависимости коэффициента передачи усилителя 9 от величины AS (фиг. 1) представлена на фиг. 2. С выхода блока 9 сигнал KVj (фиг. 1) поступает на второй вход сумматора 5, а на первый вход его поступает сигнал от регулятора 4 положения.
С сумматора 5 сигнал поступает на вход привода б, которЬш перемещает объект 7 регулирования в направлении уменьщения величины Д5.
В процессе движения объекта регулирования на привод 6 должен быть подан
тем больший сигнал, чем меньше коэффициент передачи привода, охваченного отрицательной обратной связью по скорости.
В результате этих причин возрастает ве.личина Д5. Но «медленное увеличение AS характерное для параметрических возмущений, приводит к возрастанию сигнала КУз на выходе усилителя 9. Это увеличивает скорость привода, что приводит к уменьшению величины AS. Напротив, уменьшение
алгебраической .величины 4S приводит к уменьшению величины KVj. «Быстрое же изменение Д8, характерное для управляющих воздействий и возмущений по нагрузке, задерживается инерционным звеном. Таким образом, осуществляется автомаическая настройка коэффициента передаи цепи скоростной компенсации в функции величины ощибки положения, обеспечивающая минимально возможную ошибку следящего привода.
Инерционное звено 10 позволяет следящему приводу оставаться устойчивым даже ри весьма высоких коэффициентах передаи звеньев в цепи управления величиной коростной компенсации.
Изобретение позволяет создать следящий привод, инвариантный к параметрическим возмущениям в системе, сохранить запас устойчивости и упростить устройство, что снижает затраты на изготовление и наладку следящего привода, а также повышает точность и надежность его при эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Следящая система | 1985 |
|
SU1325402A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
СЛЕДЯЩИЙ ПРИВОД, содержащий последовательно соединенные задатчик, первый блок сравнения, регулятор положе4(ЁЙ фи&,1 ния, сумматор, второй блок сравнения, привод, подключенный к объекту управления, датчик положения объекта, выход которого подключен к второму входу первого блока сравнения, выход привода через датчик скорбсти соединен с вторым входом второго блока сравнения, выход задатчика через последовательно соединенные дифференциальное звено и усилитель с переменным коэффициентом соединен с вторым входом сумматора, отличающийся тем, что, с целью упрощения привода и повышения качества регулирования, в него введено апериодическое звено, вход которого соединен с выходом первого блока сравнения, а выход - с управляющим входом усилителя с переменным коэффициентом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Менский Б | |||
| М | |||
| Принцип инвариантности в автоматическом регулировании и управлении | |||
| М., «Машиностроение, 1972 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рубашкин И | |||
| Б | |||
| Адаптивные системы взаимосвязанного управления электроприводами | |||
| Л., «Энергия, 1975, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
