Изобретение относится к машиностроению, а именно к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные и другие операции.
Известен исполнительный орган манипулятора, содержащий кинематическую цепь из сочлененных между собой звеньев, входное звено которой связано с приводом и основанием, а выходное - с захватом, причем кинематическая цепь выполнена из чередующихся рабочих и переходных звеньев, изготовленных в виде рамок, рабочие звенья и основание шарнирно связаны со штангой и выполнены в виде рамок 1J.
Данный исполнительный орган манипулятора обеспечивает повып снную г()узоподъемность и перемещение по двум координатам. Однако длина штанги должна превышать длину кинематической цепи, причем это превышение возрастает с нотребным увеличением угла наклона штанги к вертикальному (исходному) положению.
Например, при наклоне штанги к вертикали, равном 60°, ее длина должна быть в два раза больше длины кинематической цепи в исходном положении, что вызывает значительное увеличение высоты механизма в целом.
Кроме того, с увеличением наклона штанIH ее эффективность, как устройства для передачи движения к рабочим, звеньяу, надает тем быстрее, чем больше угол наклона штанги к вертикали, что связано с наступлением «мертвой зоны и препятствует расширению зоны обслуживания. Кроме того, снижается эффективность приводного устройства.
Цель изобретения - распшрение зоны обслуживания при сокращении высоты исполнительного органа манипулятора.
Поставленная цель .постигается тем, что в исполнительном органе манипулятора, содержащем кинематическую цепь из сочлепенных между собой звеньев, , входное звено которой связано с приводом и основанием, а выходное - с захватом, причем кинематическая цепь выполнена из чередующихся рабочих и переходных звеньев, изготовленных в виде рамок, рабочие звенья и основание шарнирно связаны со штангой, которая выполнена в виде раздвижного многосекционного механизма с числом секций, на единицу большим числа рабочих звеньев, каждая секция выполнена в виде размещенных в общем корпусе двух силовых одноштоковых цилиндров, штоки которых направлены в противоположные стороны, а щтоки цилиндров смежных секций жестко связаны друг с другом.
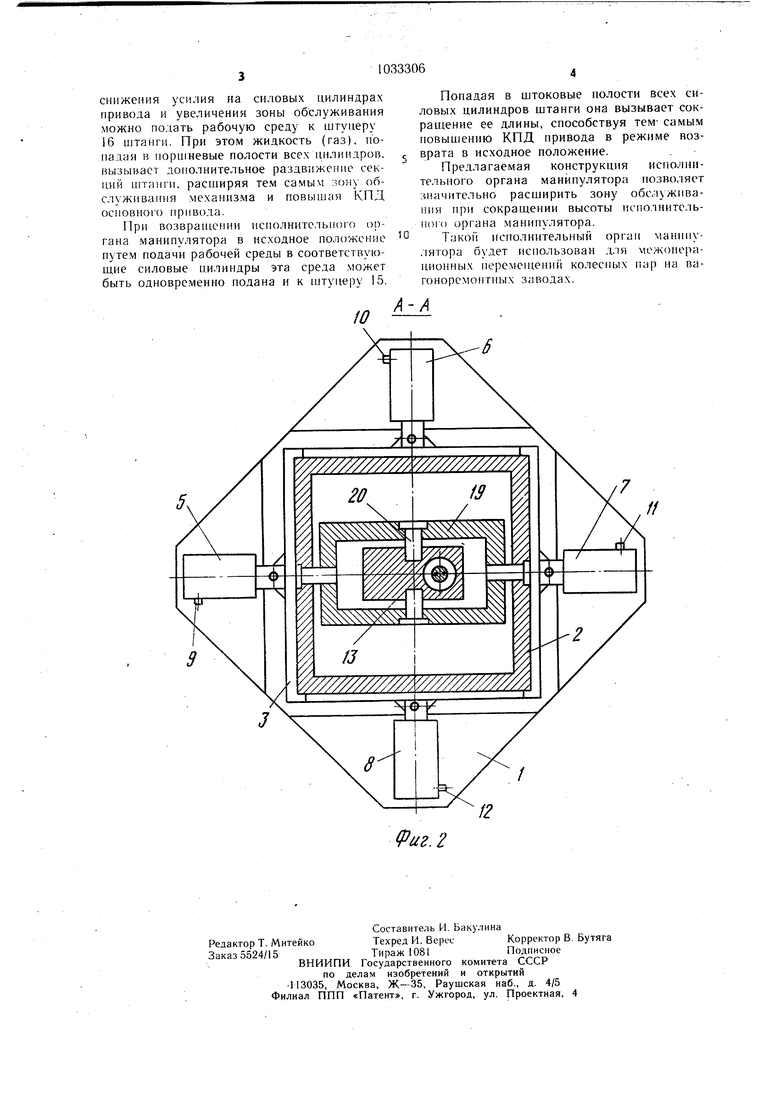
На фиг. 1 представлен исполнительный орган манипулятора, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1.
Исполнительный орган манипулятора содержит основание 1 и кинематическую цепь из рабочих 2 и переходных 3 звеньев, выполненных в виде рамок. Звенья 2 и 3 снабжены направляющими типа «ласточкин хвост, причем направляющие на верхних и нижних торцах звемьев 3 взаимно перпендикулярны. Йыходное рабочее звено 2 закрыто крьплкой 4 и к нему крепится захват (не показан).
Приводное устройство выполнено в виде четырех силовых цилиндров 5-8, шарнирно связанных с основанием 1 и звеньями кинематической цепи, причем цилиндры 5 и 7 связаны с -первым (от основания 1) переходным звеном 3, а цилиндры 6 и 8 с
первым (от осиовппия 1 ) рабочим :,веном 2
Рабо-1, .;u| к гидроцклипдра.ч о --8 подается через штуцеры 9-12.
В предлагаемой конструкции пггапга вьнюлнена как раздвижной vuioroceKiiHonный меха1П13м. Каждая секция eio содержит корпус 13, в которо.м выполнены отверстия, где расположены порпп1и со ппоками 14, соедипенные с возможностью при проведении монтажно-демоптажных работ.
Корпусы 13 и поршни со штоком 14 образуют силовые цилиндры, причем штокп связывают каждую пару смежных секций -корпусов 13, а вся штанга, набранная из рассмотренных составных частей, имеет возможность раздвигаться при работе устройства.
В штоках 14 и в корпусах 13 выполнены каналы, сообщающие друг с другом все поршневые и все штоковые полости. Рабочая среда к штанте подается через штуцеры 15 и 16.
Крайние секции - корпусы 17 и 18 имеют по одной расточке и по одному штоку 14.
Каждый корпус 13 штанги связан со своим рабочим звеном 2 посредством рамок 19 и пальцев 20, образуюших шарниры с двумя вращательными степенями подвижности.
Исполпительный орган манипулятора работает следующим образом.
Движепие вправо-влево (фиг. 2) получаем при подаче рабочей среды к штуцеру 9 (движение вправо) или к штуцеру 11 (движение влево).
Движение вверх-вниз (фиг. 2) получаем, подав рабочую среду к штуцеру 12 (движение вверх) или к штуцеру 10 (движение вниз).
При этом смежные рабочие звенья 2 смещаются по направляющим переходных звеньев на одинаковую величину, штанга наклоняется и вытягивается, а поршни со штоками 14 перемещаются по расточкам корпусов 13.
При наклоне щтанги на угол, больший 45°. КПД механизма падает, поэтому для
снижения усилия на силовых цилиндрах привода и увеличения зоны обслуживания можно подать рабочую среду к штуцеру 16 штанги. При этом жидкость (газ), понадая в поршневые полости всех цилиндров, вызывает дополнительное раздвижегше секций штанги, расширяя тем самым зону обслуживания механизма и повышая КПД основного привода.
При возвращешш иснолнитольного органа манипулятора в исходное положение путем подачи рабочей среды в соответствующие силовые цилиндры эта среда .может быть одновременно подана и к п.1туцеру 15.
Попадая в штоковые полости всех силовых цилиндров штанги она вызывает сокращение ее длины, способствуя тем самым повышению КПД нривода в режиме возврата в исходное положение.
Предлагаемая конструкция исполнительного органа манипулятора позволяет значительно расширить зону обслуживания при сокращении высоты исполнительного органа манипулятора.
Такой исполнительный орган манипулятора будет использован для межонерационных перемещений колесных пар на вагоноремонтных заводах.
Фиг. 2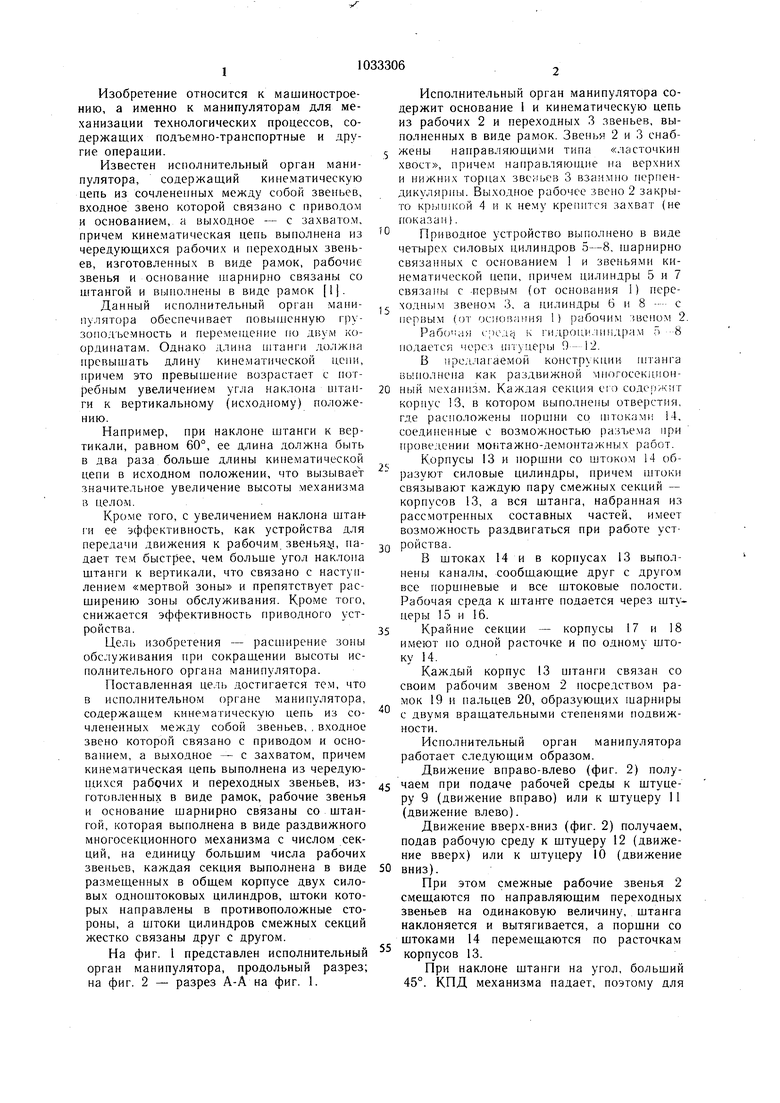
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1980 |
|
SU942981A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1192968A1 |
| Исполнительный орган манипулятора | 1981 |
|
SU971641A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1036525A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1017492A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1172696A1 |
| Манипулятор | 1985 |
|
SU1284820A1 |
ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий кинематическую цепь из сочлененных между собой звеньев, входное звено которой связано с приводом и основанием, а выходное - с захватом, причем кинематическая цепь выIfff С / полнена из чередующихся рабочих и переходных звеньев, изготовленных в виде рамок, рабочие звенья и основание шарнирно связаны с штангой, отличающийся тем, что, с целью расширения зоны обслуживания при сокращении высоты исполнительного органа, штанга выполнена в виде раздвижного многосекционного механизма с числом секций, на единицу большим числа рабочих звеньев, каждая секция выполнена в виде размеще11ных в общем корпусе двух силовых одноштоковых цилиндров, штоки которых направлены в противоположные стороны, а штоки цилиндров смежных секций жестко связаны друг с.другом. (Л оо оо со о 05
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
