7
СЛ
О 00 05
ю (fJUi.f Изобретение относится к промышленным работам и манипуляторам и может быть использовано в машиностроении, промышленности строительных материалов и других отраслях народного хозяйства для автоматизации монотонных, вредных для здоровья человека и вспомогательных операций. По основному авт. св. № 471189 известен привод манипулятора, содержаший подвижные звенья, захват, зубчатые передачи и концентрически расположенные относительно одной оси валы с шарнирами Гука 1. Недостатком известной конструкции является то, что из-за отсутствия синхронности во вращении ведущего и ведомого валов в шарнире Гука трудно обеспечить точность позиционирования в одношарнирных манипуляторах. Кроме того, угол изгиба руки манипулятора в шарнире ограничен допустимым углом изгиба карданной передачи. Цель изобретения - повышение точности позиционирования за счет обеспечеВИЯ равенства угловых скоростей ведущего и ведомого валов и исключения эффекта наложения движений трансмиссионных валов, а также расширение технологических возможностей путем увеличения угла изгиба. Поставленная цель достигается тем, что в привол,е манипулятора, содержащем подвижные звенья, захват, зубчатые передачи и концентрически расположенные относительно одной оси валы с шарнирами Гука, шарнир выполнен в виде двойной карданной передачи и снабжен конической и цилиндрической зубчатыми парами с водилом, жестко связанным одним концом с колесом конической зубчатой пары и шарнирно связанным с колесом цилиндрической зубчатой пары, причем коническая зубчатая пара связана с ведущим валом, а колеса цилиндрической зубчатой пары установлены на звеньях манипулятора. Применение сдвоенного шарнира позволяет увеличить угол изгиба ведомого звена относительно ведущего. На фиг. 1 изображена кинематическая схема привод манипулятора; на фиг. 2 механизм поворота. . Привод манипулятора содержит ведущие концентрически расположенные валы 1 и 2 .(фиг. 1), соединенные при помощи промежуточных валов 3 и 4 и крестовин 5,6 и 7,8 с ведомыми валами 9 и 10. Коническое зубчатое колесо 11 жестко связанное с ведушим валом 12, входит в зацепление с зубчатым колесом 13, жестко связанным с водилом 14, которое шарнирно соединено с неподвижным 15 и подвижным 16 зубчатыми колесами. Зубчатый сектор 16 Жестко связан с корпусом 17 манипулятора. Манипулятор работает рледующим образом. Для поворота подвижного корпуса 17 относительно неподвижного основания 18 задается вращение валу 12. Через коническую зубчатую пару И и 13 вращение передается водилу 14. Вследствие этого зубчатый сектор 16 обкатывается по неподвижному зубчатому сектору 15. Таким образом осуществляется поворот корпуса 17 манипулятора, жестко связанного, с зубчатым сектором 16, вокруг оси Xj. Зубчатая передача 15 и 16 имеет передаточное отношение равное 1. При этом обеспечивается равенство углов поворотного корпуса 17 относительно водила 14 вокруг оси Х и водила 14 относительно основания 18 вокруг оси Xj, а следовательно, равенство установочных углов oii о( двойной карданной передачи (фиг. 2), что является условием равенства угловых скоростей ведущих и 2 и ведомых 9 и 10 валов, а следовательно, условием, исключающим взаимовлияние движения одних,звеньев на другие, т.е. исключающим «эффект наложения кинематических связей. При этом удваивают свое значение установочные углы, т.е. угол поворота корпуса 17 относительно основания 18 равен 2 а, что приводит к расширению рабочего пространства манипулятора. В результате использования в качестве шарнира в приводе манипулятора двойной карданной передачи и, следовательно, увеличения угла изгиба в шарнире значительно расширяется рабочая зона такого манипулятора. Коэффициент сервиса, характеризующий геометрические качества манипулятора, увеличивается более чем в 4 раза. Кроме того, устраняется неравномерность вращения ведомых валов привода, что позволяет увеличить точность позиционирования захвата манипулятора .и ликвидировать динамические нагрузки, возникающие вследствие неравномерности вращения, это, в свою очередь приводит к увеличению долговечности деталей карданных шарниров привода в 1,5-2 раза, а следовательно, увеличению надежности и срока службы манипулятора. Использование изобретения позволит расширить область применения шарнирных манипуляторов с электромеханическим приводом.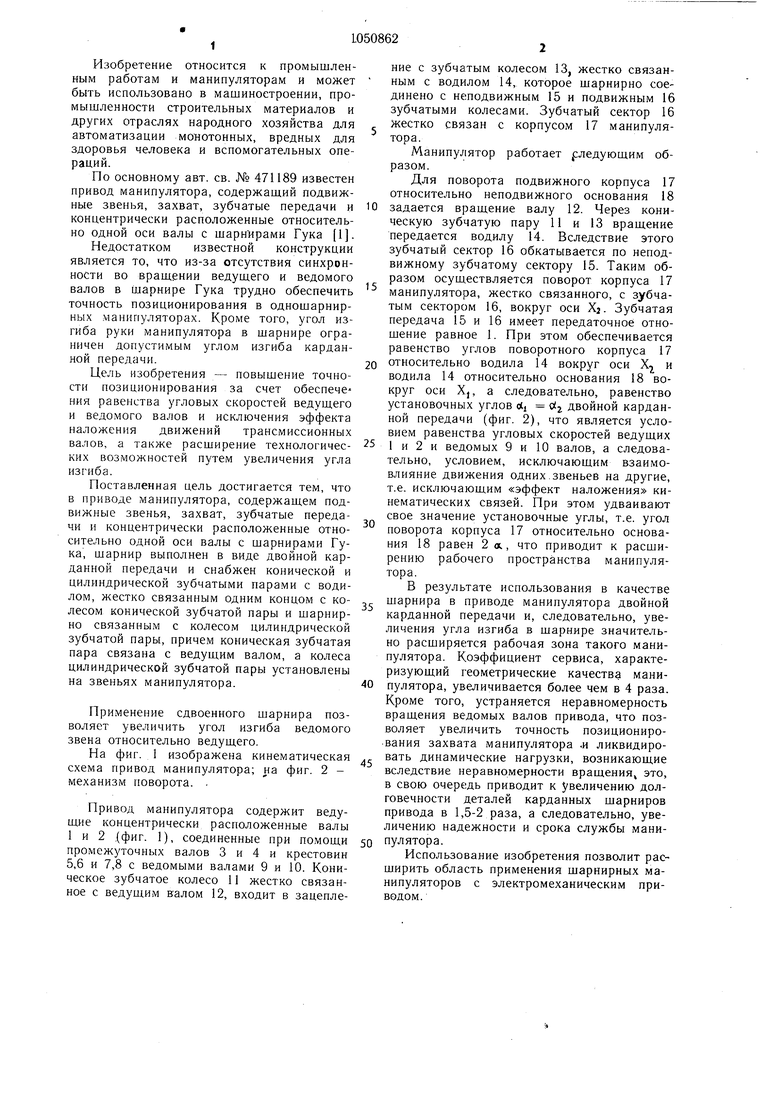
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1982 |
|
SU1114544A2 |
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
ПРИВОД МАНИПУЛЯТОРА по авт. св. № 471189, отличающийся тем, что, с целью повышения точности позиционирования за счет обеспечения равенства угловых скоростей ведущего и ведомого валов и исключения эффекта наложения движений трансмиссионных валов, а также расширения технологических возможностей путем увеличения угла изгиба, шарнир выполнен в виде двойной карданной передачи и снабжен конической и цилиндрической зубчатыми парами и водилом, жестко связанным одним концом с колесом конической пары, и шарнирно связанным с колесами цилиндрической зубчатой пары, причем коническая зубчатая пара связана с ведущим валом, а колеса цилиндрической зубчатой пары установлены на звеньях манипулятора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привод манипулятора | 1973 |
|
SU471189A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
