Изовретение относится к оборудованию для изготовления двухветвевых пружин с повышенными требованиями к точности их геометрических параметров и усложненной конфигурации концов и может быть использовано в приборо-и машиностроении.
Известно устройство для навивки пружин с двумя ветвями, содержащее смонтированные на станине и имеющие оСщий привод механизм подачи и правки заготовки, механизм навивки пружины, выполненный в виде оправки и двух установленных с противоположных сторон ее поводков, закрепленных во вращающихся шпинделях, смонтированных с возможностью осевого возвратно-поступательного движения 1.
Однако данное устройство не позволяет изготавливать пружины с фасонными концами, изогнутыми в различных плоскостях. ;
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является автомат, содержащий смонтированные на станине и кинематически связанные между собой посредством распределительного вала подающий механизм, механизм У-образной гибки заготовки с пуансо ном, механизм навивки, состоящий из симметрично расположенных относительно гибкого пуансона водил и шпинделей, исредство для гибки концов пружины 2.
Однако известный автомат не может, быть использован для изготовления двухветвевых пружин с фасонными концами, изогнутыми в различных
плоскостях. I
Цель изобретения - расширение технологических возможностей автомата путем изготовления пружин с концами, изогнутыми в двух плоскостях.
Поставленная цель достигается тем,что автомат для изготовления двухветвевых пружин с отогнутыми коицами, содержащий смонтированные на станине и кинематически связанные между собой посредством распределительного вала, подающий механизм, механизм V-образной гибки с пуансоном, механизм навивки, состоящий из симметрично расположенных относительно гибочного пуансона водил и шпинделей и средство для гибки концов пружины, согласно изобретению имеет коллектор для управления электрическими исполнительными механизмами, размещенный-на распределительном валу автомата, и манипулятор для передачи . заготовки пружины от механизма навивки к средству для гибки концов пружины, состоящий из закрепленной на станине зубчатой рейки, взаимодействующей с рейкой швстер|ни кинематически связанной прсредItTBOM системы рычагов с распределительным валом автомата, смонтированного на шестерне рычажного захвата, ось качания рычагов которого размещена в центре шестерни, и средство для раскрытия захвата, при этом подающий механизм выполнен в виде клещевого-захвата, а средство для гибки концов пружины выполнено в виде штампа, состоящего из матрицы,
0 фиксирующих заготовку пружины пальцев, установленных с возможностью перемещения посредством электромагнитов, управляемых от размещенного на распределительном валу коллёкто5 ра и трех пуансонов, первый из которых установлен с возможностью перемещения посредством подпружиненного рычага, взаимодействуюЕего с распределительным валом автомата и служит
0 для гибки концов пружины в одной плоскости, а второй и третий установлены с возможностью перемещения посредством электромагнитов, управляe№JX коллектора, и служат для гибки
5 концов пружины в плоскости, перпендикулярной плоскости первого гиба.
Кроме того, средство для раскрцтия захвата манипулятора состоит из смонтированной на станине кулисы.
размещенных на ней кулачков, смонтированного на первом пуансоне толкателя, и закрепленных на Еялчагах захвата и шестерне штифтов, при раскрытии захвата взаимодействующих с кулачками куйисы и толкателем пуансона.
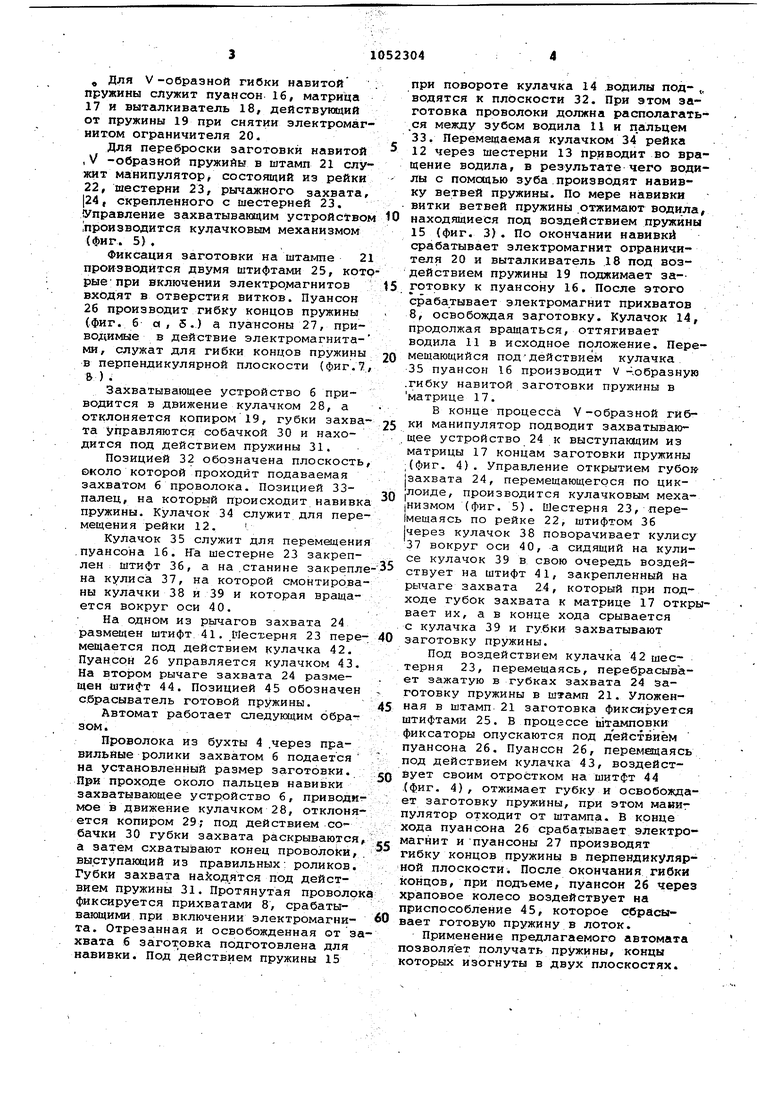
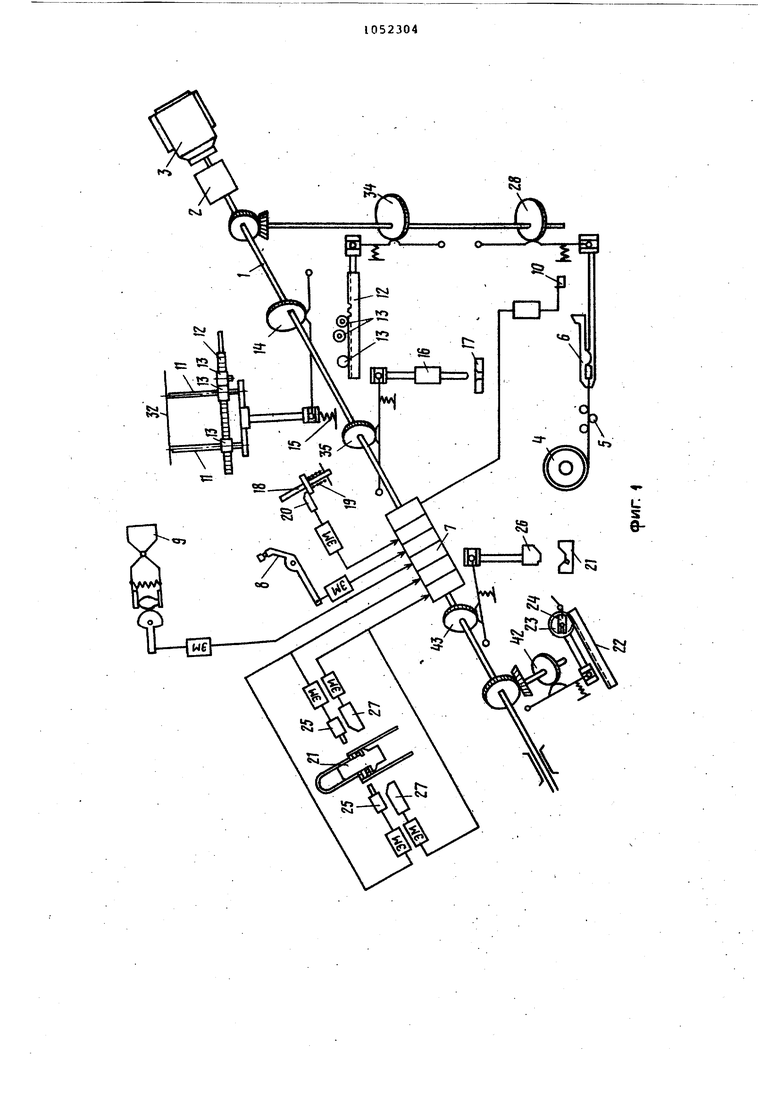
На фиг. 1 показана кинематическая схема автсмлата; на фиг. 2 и 3 - механизм навивки и механизм V -образной ,
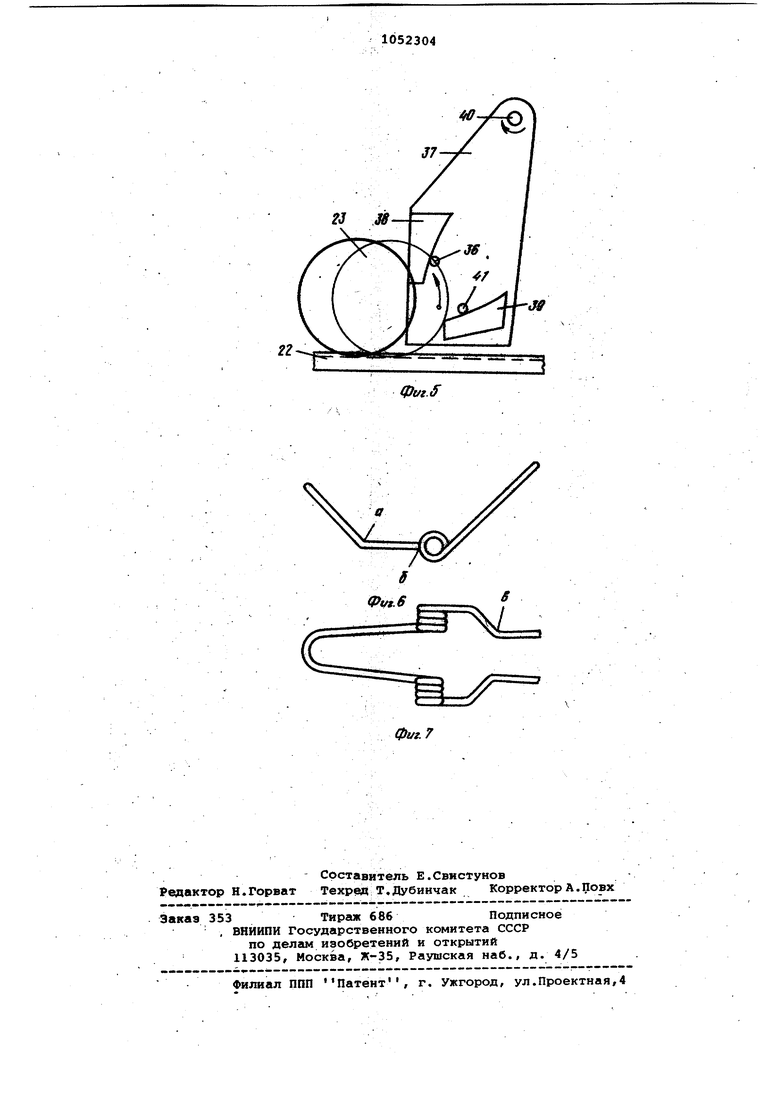
0 гибки; иа фиг. 4 - манипулятор;на фиг. 5 - кулачковый механизм манипулятора; на фиг. 6 и 7 изготавливаемая прузкина.
Все механизмы автомата кинемати5 чески связаны и приводятся в движение от распределительного вала 1, который вращается через редуктор-2 электродвигателем 3. Для протягивания проволоки из бухты 4 cлsnкит механизм подачи, состоящий из правильных роликов 5 и клещевого захвата 6. Коллектор 7, жестко укрепленньй иа валу 1, в соответствии с установленной последовательностью работы механизмов автомата включает и отключает
электромагниты. Прихваты 8 фикструйт протянут га) проволоку, нож 9 производит отрезку заготовки,рычаг 10 освобождает заготовку проволоки от захвата 6 - все механизмы срабатывают
0 от электрсялагнитов в указанной последовательности. Управление навивочными водилакш 11 осуществляется рейкой 12 и шестернями. 13. Отвод и подвод воДил 11 производится кулачком 14 и
5 пружиной 15. , Для V-образной гибки навитой пружины служит пуансон 16, матрица 17 и выталкиватель 18, действующий от пружины 19 при снятии электромагнитом ограничителя 20. Для переброски заготовки навитой , V -образной пружийы в штамп 21 служит манипулятор/ состоящий из рейки 22, шестерни 23, рычгикного захвата, |24, скрепленного с шестерней 23. Управление захватывающим устройством .производится кулачковым механизмом (фиг. 5}., Фиксация заготовки на 2 производится двумя штифтами 25, котр рыепри включении элeктpo aгнитoв входят в отверстия витков. Пуансон 26 производит гибку концов пружины (фиг. 6 а, 5.) а пуансоны 27, приводимые в действие электромагнитами, служат для гибки концов пружины в перпендикулярной плоскости (фиг,7 & ) . Захватывающее устройство б приводится в движение кулачком 28, а отклоняется копиром 19, губки захвата Управляются собачкой 30 и находится под действием пружины 31. Позицией 32 обозначена плоскость около которой проходит подаваемая захватом б проволока. Позицией 33палец, на который происходит навивка пружины. Кулачок 34 служит для перемещения рейки 12. Кулачок 35 служит для перемещени .пуансона 16. На шестерне 23 закреплен штифт 36, а на .станине закрепле на кулиса 37, на которой смонтированы кулачки 38 и 39 и которая вращается вокруг оси 40. На одном из рычагов захвата 24 размещен штифт 41. Мессерня 23 перемещается под действием кулачка 42. Пуансон 26 управляется кулачком 43. На втором рычаге захвата 24 размещен штифт 44. Позицией 45 обозначен сбрасыватель готовой пружины. Автомат работает следующим обра-г 3 ом. Проволока из бухты 4 .через правильные ролики захватом б подается на установленный размер заготовки. При проходе около пальцев навивкИ захватывающее устройство б, приводит мое в движение кулачком 28, отклоняется копиром 29; под действием собачки 30 губки захвата раскрываются а затем схваты вают конец пpoвoлokи, выступающий из правильных: роликов. Губки захвата находятся под действием пружины 31. Протянутая проволок фиксируется прихватами 8, срабатывающими при включении электромагнита. Отрезанная и освобожденная от за хвата б заготовка подготовлена для навивки. Под действием пружины 15 при повороте кулачка 14 .воДилы под- ,, водятся к плоскости 32. При этом заготовка проволоки должна располагать ся между зубом водила 11 и п.альцем 33. Перемещаемая кулачком 34 рейка 12 через шестерни 13 приводит во вращение водила, в результате чего водилы с помощью зуба производят навивку ветвей пружины. По мере навивки витки ветвей пружины отжимают водила, находящиеся под воздействием пружины 15 (фиг. 3). По окончании навивки срабатывает электромагнит ограничителя 20 и выталкиватель .18 под воздействием пружины 19 поджимает за-готовку к пуансону 16. После этого срабатывает электромагнит прихватов . 8, освобождая заготовку. Кулачок 14, продолжая вращаться, оттягивает водила 11 в исходное положение. Перемещающийся под-действием кулачка 35 пуансон 16 производит V -.образную .гибку навитой заготовки пружины в матрице 17. В конце процесса V-образной гИбки манипулятор подводит захватывающее устройство 24 к выступающим из матрицы 17 концам заготовки пружины ;(фиг. 4), Управление открытием губо .захвата 24, перемещающегося по цик лоиде, производится кулачковым меха|Низмом (фиг. 5). Шестерня 23, пере1мещаясь по рейке 22, штифтом 36 |через кулачок 38 поворачивает кулису 37 вокруг оси 40, а сидящий на кулисе кулачок 39 в свою очередь воздействует на штифт 41, закрепленный на рычаге захвата 2.4, который при подходе губок захвата к матрице 17 открывает их, а в конце хода срывается с кулачка 39 и губки захватывают заготовку пружины. Под воздействием кулачка 42 шестерня 23, перемещаясь, перебрасывает зажатую в губках захвата 24 заготовку пружины в штамп 21. Уложенная в штамп 21 заготовка фиксируется штифтами 25. В процессе штамповки фиксаторы опускаются под дейс-гвиём пуансона 26. Пуансон 26, перемещаясь под действием кулачка 43, воздействует своим отростком на шитфт 44 .(фиг. 4), отжимает губку и освобождает заготовку пружины, при этом макиг пулятор отходит от штампа. В конце хода пуансона 26 срабатывает электромагнит и пуансоны 27 производят гибку концов пружины в перпендикулярной плоскости. После окончания гибки концов, при подъеме, пуансон 26 через храповое колесо воздействует на приспособление 45, которое сбрасывает готовую пружину в лоток. Применение предлагаемого автомата позволяет получать пружины, концы которых изогнуты в двух плоскостях.
Г6
я
//
n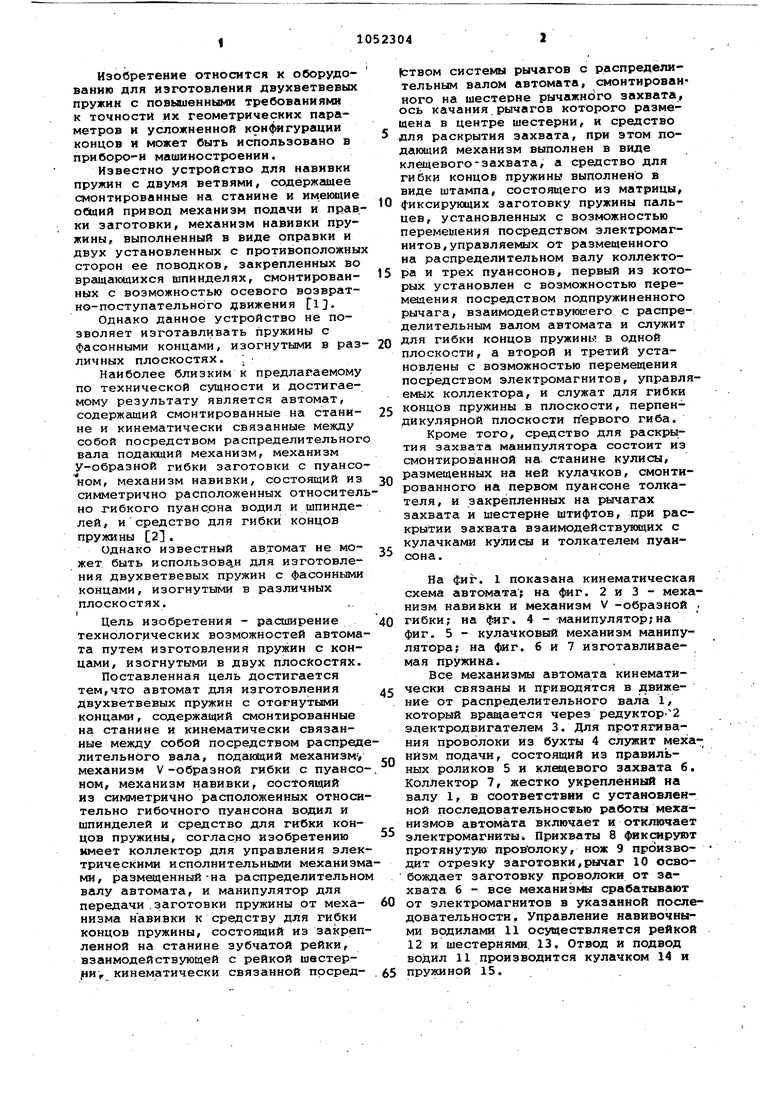
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
| Автомат для изготовления изделий из проволоки типа шплинтов | 1982 |
|
SU1093380A1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
| Автомат для изготовления из проволоки изделий различной конфигурации | 1972 |
|
SU478659A1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Устройство для навивки пружин с фасонными ушками | 1978 |
|
SU733816A1 |

1. АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ДВУХВЕТВЕВКХ ПРУЖИН С ОТОГНУТЫМИ КОНЦАМИ, содержащий смонтированные на станине и кинематически связанные между собой посредством распределительного вала подающий механизм, механизм V-образной гибки заготовки с пуансоном, механизм навивки, состоящий из симметрично расположенных относительно гибочного пуансона ; водил и шпинделей, и средство для гибки концов пружины, от л и ч а rain и и с я тем, что, с целью расширения технологических возможностей путем, обеспечения- изготовления пружин с концами, изогнутыми в двух плоскостях, он имеет коллектор для управлен1ая электрическими исполнительными механизмами, размещенный на распределительном валу автомата, и манипулятор для передачи заготовки пружины от механизма навивки к средству для гибки концов пружины, состоящий из закрепленной на станине, зубчатой рейки, взаимодействующей с рейкой шестерни, кинематически связанный посредством системьг рычагов с расйре.делительным валом автомата, смонтированного на шестерне рычажного захвата, ось качания рычагов которого размещена в центре шестерни, и средство для раскрытия захвата манупулят6ра,при этом подающий механизм выполнен в виде клещевого захвата, а средство для гибки концов пружины выполнено в виде штампа, состоящего из матрицы, фиксирующих заготовку пружины пальцев, установленных с возможностью перемещения посредством электромагнитов, управляемых от размещенного на распределительном валу коллектора, и трех пуансонов, первый из которых установлен с возможностью перемещения посредством i подпружиненного рычага, взаимодействугацего с распределительным валом W автомата, и служит для гибки концов пружины в одной плоскости, а второй и третий установлены с возможностью перемещения посредством электромагнитов, управляемых от коллектора, и служат для гибки концов прукины в плоскости, перпендикулярной плоскости первого гиба. о 2. Автомат по п. 1, отличаюЛ щи и с я тем, что средство для ас крытия захвата манипулятора состоит. N0 из смонтированной на станине кулисы, : о размещенных на ней кулачков, смонтированного на первом пуансоне толкателя и закрепленных на рычагах за4 ,хвата и шестерне штифтов, при раскрытии захвата взаимодействующих с . .кулачками кулисы и толкателем пуан-. сона.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
