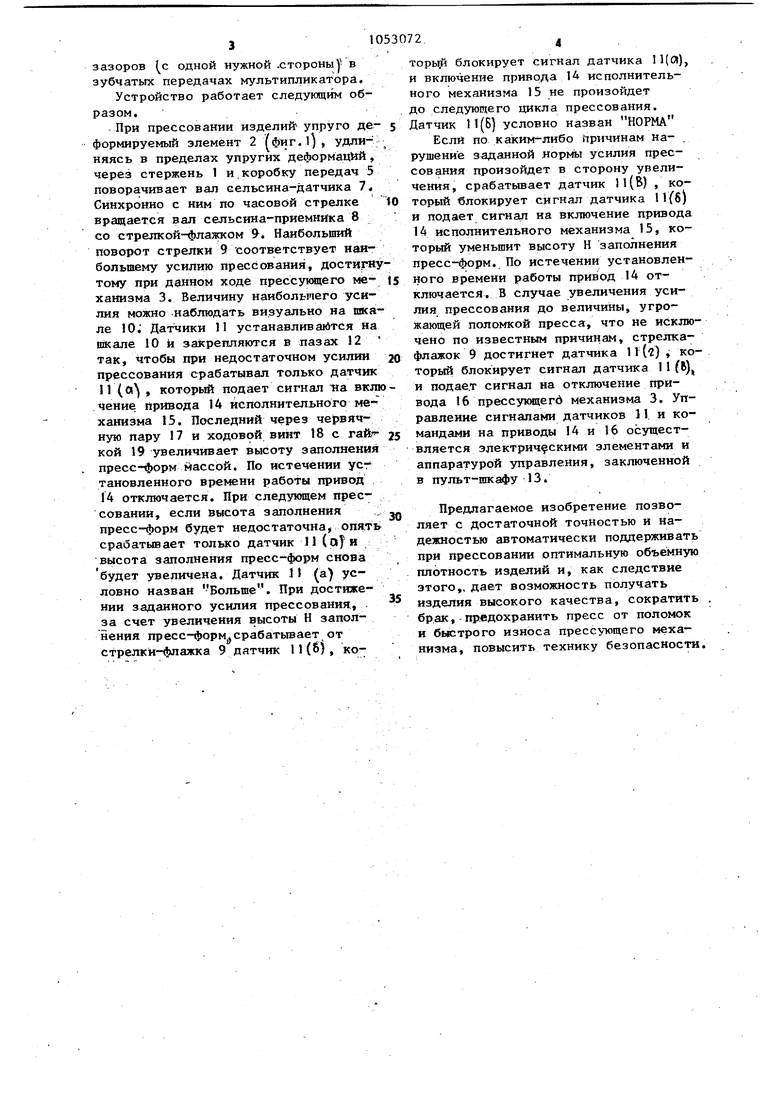
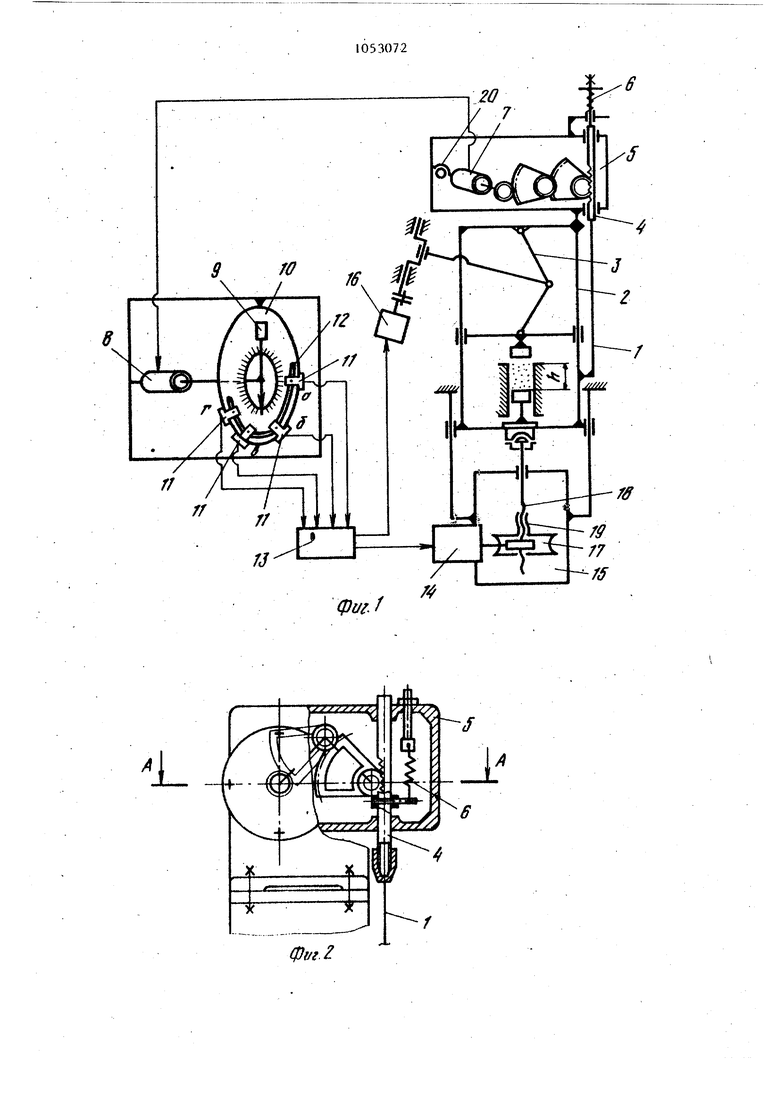
I1 Изобретение относится к строитель ству, в частности к изготовлению кир пича методом полусухого прессования. Известно устройство для автоматизированного регулирования усилия пре сования, содержащее датчик, включенный в цепь приводного электродвигателя пресса, регулйтор и исполнитель ный механизм )Однако данное устройство имеет низкую точность регулирования, так как регулирование усилия прессования осуществляется в зависимости от тока электродвигателя пресса, а само усилие прессования не контролируется и не регулируется. Наиболее близким к изобретению по технической сущности является устрой ство для автоматического ре1улирования заполнения пресс-форм прессов с приводом, содержащее датчик усилия прессования, указатель усилия прессования, исполнительный механизм с приводом и управляюс1им приспособлением 2 . Недостаток известного устройства 3aKJB04aeTCH в невысокой надежности из-за сложной конструкции и невозможности постоянно контролировать усилие прессования и отключать привод пресса при превышении усилия npe товвния вьше до.пустимого. Цель изобретения - повышение надежности работы. Цель достигается -тем, что в устройстве для автоматического регулиро вания заполнения пресс-форм прессов с приводом, содержащем датчик усилия прессования, указатель усилия прессования, исполнительный механизм с приводом и управляющим приспособлеИием, датчик усилия прессования выполнен в виде коробки передач с корпусом и зубчатой рейкой, упругого эл мента, соединенного с корпусом короб ки передач, приводом пресса и зубчатой рейкой, и сельсина-датчика с валом, соединенным с выходньм валом коробки передач, указатель усили прессования - в виде сельсин-приейника и ввсалы со стрелкой-флажком, со . диненной с сельсином-приемником, а управляипее приспособление - в виде электрических бесконтактных датчиков установленных по окружности шкалы с Возможностью взаимодействия со стрел кой-флахком, и пульта-шкафа, имеющего электрическую связь с бесконтакт2ными датчиками и приводом исполнительного механизма. На фиг..1 изображена принципиальная схема устройства; на фиг.2 - коробка передач с сельсин-датчиком; на фиг. 3 - разрез А-А на фиг,2; на фиг. 4 - сельсин-приемник со стрелкой-флажком, шкалой и бесконтактными датчиками; на фиг. 5 - разрез Б-Б на фиг ..А. Устройство для автоматического регулирования заполнения пресс-формь /фиг.1) состоит из стержня 1, который одним концом жестко соединен с упруго деформируемым элементом 2 (например, штангой) прессующего меха- низма 3, а другим - с рейкой 4 коробки передач 5. Рейка 4, натянутая пружиной 6, через зубчатые передачи соединена с валом сельсина-датчика 7. Сельсин-датчик 7 и коробка передач 5 установлены в одном корпусе и жестко закреплены на упруго деформируемом элементе 2 прессующего механизма 3. Сельсин-датчик 7 электрически соединен с сельсином-приемником 8 и работает синхронно с ним. На валу сельсина-приемника 8 установлена стрелка-флажок 9, которая при вращении вала сельсина-приемника показьюает величину усилия прессования (угла поворота) на проградуированной щкале 10 и одновременно взаимодействует с бесконтактными датчиками И(а,Б,6иг} Датчики. 1 1 (а.Ь, &,и -г ) установлены по окружности шкалы 10 имеют возможность перемещаться по пазам 12 и фиксироваться в нужном положении. Датчики 11(а,В и В) предназначены для регулирования усилия прессования,а датчик 11 (l) - для .отключения привода прссующего механизма в случае возникновения усилий прессования, превышающих допустимые. Сигналы с датчиков 1 подаются на электрические элементы пульта-шкафа 13. Пульт-шкаф 13 состоящий из аппаратов защиты, управления и пуска, управляет работой привода 14 исполнительного механизма 15, а также отключает привод 16 прессующего механизма пресса. Исполните льный механизм 15 содержит червячную передачу 17 и ходовой винт 18 с гайкой 19. Исполнительным механизмом 15 регулируется высота(Н) заполнения пpecc-фop aI. Спиральная пружина 20 предназначена для устранения люфтов и боковых
зазоров с одной нужной .стороны - в зубчатых передачах мультипликатора.
Устройство работает следующим образом. При прессовании изделий упруго деформируемый элемент 2 /фиг.1), удлиняясь в пределах упругих деформаций через стержень 1 и коробку передач 5 поворачивает вал сельсина-датчика Т Синхронно с ним по часовой стрелке вращается вал сельсина-приемняка 8 со стрелкой-флажком 9. Наибольший поворот стрелки 9 соответствует наибольшему усилию прессования, достигну тому при данном ходе прессующего механизма 3. Величину наибольшего усилия можно наблюдать визуально на шкале 10 Датчики 11 устанавливайтся йа шкале 10 и закрепляются в пазах 12 так, чтобы при недостаточном усилии прессоваиия срабатывал только датчшс 11 (о , который подает сигнал на вклю чение привода 14 исполнительного ме-ханизма 15. Последний через червячную пару 17 и ходовой винт 18 с гайгкой 19 увеличивает высоту заполнения пресс- орм массой. По истечении усг тановленного времени работы привод 14 отключается. При следукнцем прессовании, если высота заполнения :i. пресс-форм будет недостаточна, опять срабатывает только датчик 11 (о|и высота заполнения пресс-форм снова будет увеличена. Датчик И /а) условно назван Больше. При достижении заданного усилия прессования, за счет увеличения высоты Н заполнения пресс-форм,срабатьгоает от стрелки-флажка 9 датчик 11(6), коTopbjp блокирует сигнал датчика П(Я), и включение привода 14 исполнительного механизма 15 не произойдет до следующего цикла прессования. Датчик 11(5) условно назван НОРМА Если по каким-либо причинам нарушение заданной нормь усилия прессования произойдет в сторону увеличения, срабатывает датчик П(В) , который блокирует сигнал датчика П(б) и подает сигнал на включение привода 14 исполнительного механизма 15, который уменьшит высоту Н заполнения пресс-форм. По истечении установленного времени работы привод 14 отключается. В случае увеличения усилия прессования до величины, угрожающей поломкой пресса, что не исключено по известным причинам, стрелкафлажок 9 достигнет датчика 11 () у который блокирует сигнал датчика 1 1 (Ь) и подае.т сигнал на отключение привода 16 прессующегб механизма 3. Управление сигналами датчиков 11. и командами на приводы 14 и 16 осуществляется электрическими злементами и аппаратурой управления, заключенной в пульт-шкафу 13. Предлагаемое изобретение позволяет с достаточной точностью и надежностью автоматически поддерживать при прессовании оптимальную объёмную плотность изделий и, как следствие этого,, дает возможность получать изделия высокого качества, сократить . бр.ак,-предохранить пресс от поломок и быстрого износа прессующего механизма, повысить технику безопасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТИКАЛЬНЫЙ ПРЕСС | 1990 |
|
RU2036801C1 |
| Правильный пресс | 1978 |
|
SU770602A1 |
| Пресс | 1984 |
|
SU1240620A1 |
| Вибропогружатель с регулируемым статическим моментом | 1991 |
|
SU1828479A3 |
| Устройство для регулирования энергии удара пресс-молота | 1974 |
|
SU506513A1 |
| СИСТЕМА ДИАГНОСТИКИ КОЛОНН ГИДРАВЛИЧЕСКОГО ШТАМПОВОЧНОГО ПРЕССА КОЛОННОЙ КОНСТРУКЦИИ | 2007 |
|
RU2364511C2 |
| Зажимное устройство | 1981 |
|
SU1009630A1 |
| Устройство для измерения усилия разрушения образцов | 1981 |
|
SU966509A1 |
| Механизм двухстрелочного указателя | 1982 |
|
SU1059150A1 |
| Устройство для центрирования изделия при зажиме | 1981 |
|
SU1000158A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЗАПОЛНЕНИЯ ПРЕССФОРМ ПРЕССОВ.С ПРИВОДОМ, содержащее датчик усилия прессования, указател усилия прессования, исполнительный механизм с приводом и управляющим приспособлением, о тл и ч ающ.ее с я тем, что, с целью повышения надежности работы, датчик усилия прессования выполнен в виде коробки передач с корпусом и зубчатой рейкой, упругого элемента, соединенного с корпусом коробки передач, приводом пресса и зубчатой рейкой, и сельсина датчика с валом, -соединенным с выходным валом коробки передач, указатель усилия прессования - в виде сельсина-приемника и шкалы со стрелкой - флажком, соединенной с сельсином-приемником, а управляющее приспособление - в виде электрических бесконтактных датчиков, установленных по окружности шкалы с возможно(Л стью взаимодействия со с т релкой-флажком, и пульта-шкафа, имеющего электрическую связь с бесконтактными датчиками и приводом исполнительного механизма.
J
| I | |||
| Устройство для автоматического регулирования усилия прессования | 1976 |
|
SU617294A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического регулирования усилия прессования коленорычажных прессов | 1974 |
|
SU494728A1 |
| Г, 05 D 15/00, 1974 (прототип). | |||
