Изобретение относится к подъемно-транспортйой технике, а именно к вакуумным самовакуумирующимся грузозахватным устройствам, и предназначено для подъема и транспортирования различных штучных грузов (металл, пластмассы, бетон и т. д).
По основному авт. св. № 943166 известно вакуумное грузозахватное устройство, содержащее корпус с вакуумобразующим цилиндром, внутри которого расположен поршень со штоками, соединенными траверсой, вакуумную захватную камеру, прикрепленную к корпусу цилиндра и механизм фиксации положения поршня 1.
Недостатком известного вакуумного грузозахватного устройства является возможность применения только для воздухонепроницаемых грузов с гладкой поверхностью так как его работа при транспортировании воздухопроницаемых и с шероховатой поверхностью грузов, таких,как бетонные изделия, металл с окалиной и т. д., длительное время невозможна и ненадежна, так как время перемещения груза устройством ограниченно величиной хода поршня в вакуумобразующем цилиндре, а время хода поршня в цилиндре зависит от скорости натекания атмосферного воздуха в вакуумную захватную камеру в месте контакта с грузом. Чем хуже качество поверхности транспортируемого груза, тем быстрее будет натекание воздуха в захватную камеру и тем самым будет снижаться время надежной работы вакуумного грузозахватного устройства.
Цель изобретения - повышение надежности при работе с пористыми материалами.
Указанная цель достигается тем, что вакуумное грузозахватное устройство, содержашее корпус с вакуумобразуюш,им цилиндром, внутри которого расположены поршень со штоками, соединенными траверсой, вакуумную захватную камеру, прикрепленную к корпусу цилиндра, и механизм фиксации положения поршня, снабжено двуплечими захватными рычагами, шарнирно закрепленными в нижней части корпуса, и вертикальными штангами, нижний конец каждой из которых шарнирно соединен с соответствуюшими плечом рычага, а верхний выполнен с продольным пазом и посредством пальца, расположенного в пазу, соединен с верхними концами штоков.
На фиг. 1 показано вакуумное самовакуумируюшееся грузозахватное устройство; обший вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Устройство состоит из корпуса 1, вакуумообразуюшего цилиндра 2, поршня 3 со штоками 4. Поршень с цилиндром соединен герметизирующей эластичной диафраглюй 5. К корпусу прикреплена вакуумная захватная камера 6 с герметизирующим уплотнением 7. Штоки 4 прикреплены к траверее 8 с проушиной 9 для подвеса устройства к крюку грузоподъемного механизма.
К корпусу 1 шарнирно присоединень захватные рычаги 10 при помощи шарнира 11. В зависимости от транспортируемого изделия захватные рычаги могут быть выполнены в виде подхватов, крюков и т. д.
Размер и форма рычагов так же может быть различной, в зависимости от формы и размеров транспортируемого груза. 0 Рычаги 10 шарнирно соединены с тягами 12. Тяги 12 имеют продольные пазы 13 для размешения в них пальцев 14, выполненных на траверсе 8.
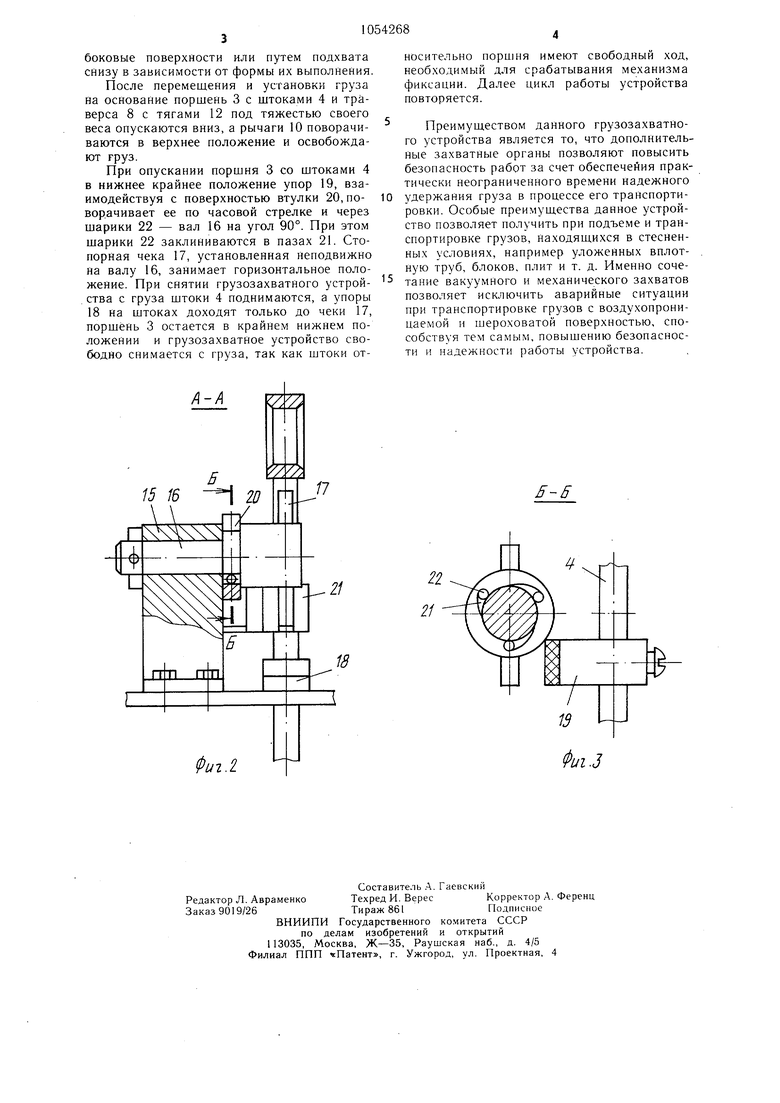
Вакуумное грузозахватное устройство содержит . механизм фиксации положения поршня в вакуумобразующем цилиндре, включающий корпус 15 с валом 16, на котором закреплена стопорная чека 17. На штоках 4 жестко закреплены упоры 18, а на одном из штоков, кроме этого, жестко Q закреплен упор 19. На валу 16 свободно установлена втулка 20 с клиновидными пазами 21 со стороны вала, а в пазах размещены тела качения 22 (щарики или ролики).
Работа грузозахватного устройства осуществляется следующим образом. 5Подвешенное к крюку подъемного механизма за траверсу 8 грузозахватное устройство опускается на груз, при этом порщень 3 со щтоками 4 перемещается в крайнее нижнее положение, а упор 19, взаимодействуя с поверхностью втулки 20, поворачивает ее по часовой стрелке и через шарики 22 вал 16 - на угол 90°. При этом шарики 22 заклиниваются в пазах 21. Стопорная чека 17, установленная неподвижно на валу 16, переходит из горизонтального положения в вертикальное положение.
При подъеме траверса 8 штоки 4 с поршнем 3 и закрепленным упором 19 перемеиадются вверх, при этом втулка 20, взаимодействующая с поверхностью упора 19, вращается против часовой стрелки, проскальзывая относительно вала 16, так как 1ларики 22 не заклинены и не препятствуют вращению втулки 20 относительно вала 16. Чека 17 остается в вертикальном положении, а штоки 4 с поршнем 3 перемещаются вверх. За счет создавшегося разрежения воздуха (вакуума под поршнем происходит захват и подъем груза. В процессе перемещения груза из-за натекания воздуха в камеру 6 поршень со штоками продолжает перемещаться вверх относительно корпуса 1. При перемещении поршня со штоками относительно цилиндра при транспортировании груза пальцы 14 траверсы 8, перемещаясь по пазам 13 тяг 12, дойдя до верхней части паза, перемещают тяги. При этом тяги 12, соединенные с рычагами 10, их поворачивают вокруг шарниров 11 и перемещают вниз и в сторону груза. Рычаги 10 входят в контакт с грузом и при дальнейшем транспортировании груза он удерживается ими путем его зажатия за
боковые поверхности или путем подхвата снизу в зависимости от формы их выполнения
После перемещения и установки груза на основание поршень 3 с штоками 4 и траверса 8 с тягами 12 под тяжестью своего веса опускаются вниз, а рычаги 10 поворачиБаются в верхнее положение и освобождают груз.
При опускании поршня 3 со штоками 4 в нижнее крайнее положение упор 19, взаимодействуя с поверхностью втулки 20,повор.ачивает ее по часовой стрелке и через шарики 22 - вал 16 на угол 90°. При этом шарики 22 заклиниваются в пазах 21. Стопорная чека 17, установленная неподвижно на валу 16, занимает горизонтальное положение. При снятии грузозахватного устройства с груза штоки 4 поднимаются, а упоры 18 на штоках доходят только до чеки 17, поршень 3 остается в крайнем нижнем положении и грузозахватное устройство свободно снимается с груза, так как штоки отА-/
ZA
носительно поршня имеют свободный ход, необходимый для срабатывания механизма фиксации. Далее цикл работы устройства повторяется.
Преимуществом данного грузозахватного устройства является то, что дополнительные захватные органы позволяют повысить безопасность работ за счет обеспечения практически неограниченного времени надежного удержания груза в процессе его транспортировки. Особые преимущества данное устройство позволяет получить при подъеме и транспортировке грузов, находящихся в стесненных условиях, например уложенных вплотную труб, блоков, плит и т. д. Именно сочетание вакуумного и механического захватов позволяет исключить аварийные ситуации при транспортировке грузов с воздухопроницаемой и шероховатой поверхностью, способствуя тем самым, повышению безопасности и надежности работы устройства.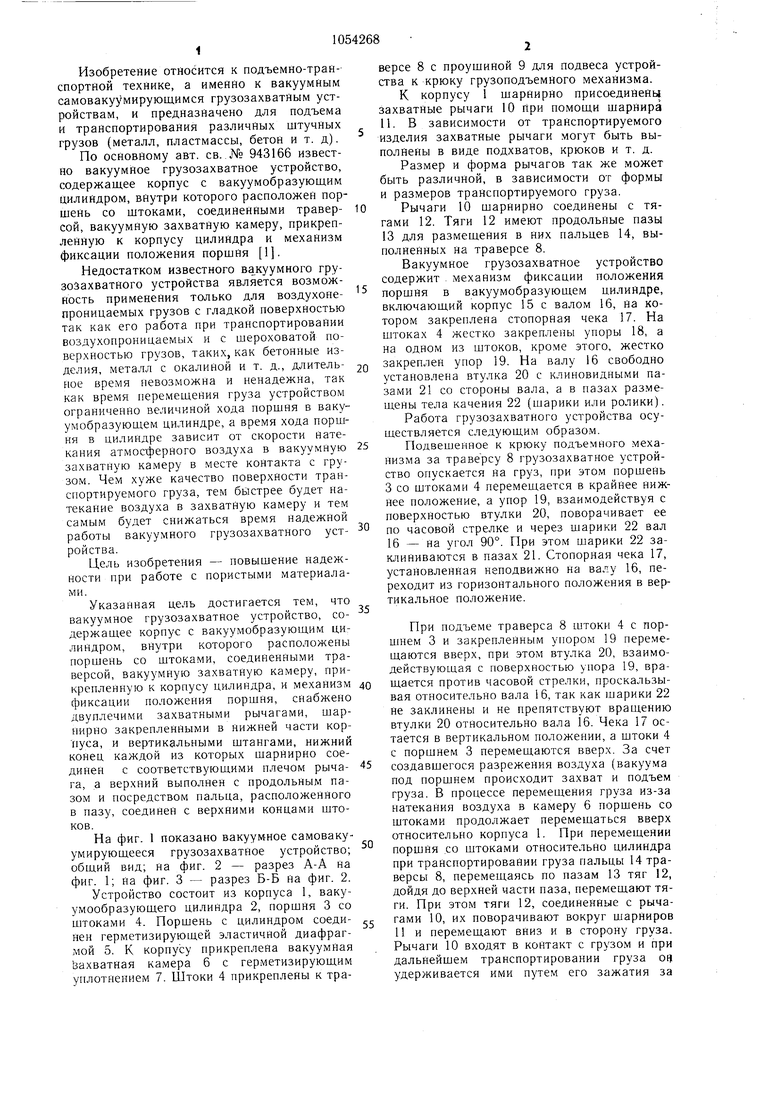
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1979 |
|
SU931646A1 |
| Вакуумное грузозахватное устройство | 1980 |
|
SU943166A1 |
| Грузозахватное устройство | 1989 |
|
SU1622274A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1306881A1 |
| Вакуумное грузозахватное устройство | 1989 |
|
SU1676989A1 |
| Вакуумное грузозахватное устройство | 1979 |
|
SU829537A1 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1199734A1 |
| Вакуумное захватное устройство | 1978 |
|
SU779246A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1982 |
|
SU1022929A1 |
ВАКУУМНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО по авт.св. № 943166, отличающееся тем, что, с целью повышени.я надежности при работе с пористыми изделиями, оно снабжено двуплечими захватными рычагами. 1иарпирно-закрепленными в нижней части корпуса, и вертикальными штангами, нижний конец каждой из которых шарнирно соединен с соответствующим плечом рычага, а верхний выполнен с продольным пазом и посредством пальца, расположенного в пазу, соединен с верхними концами штоков. (Л ел 4 ю Gf5 оо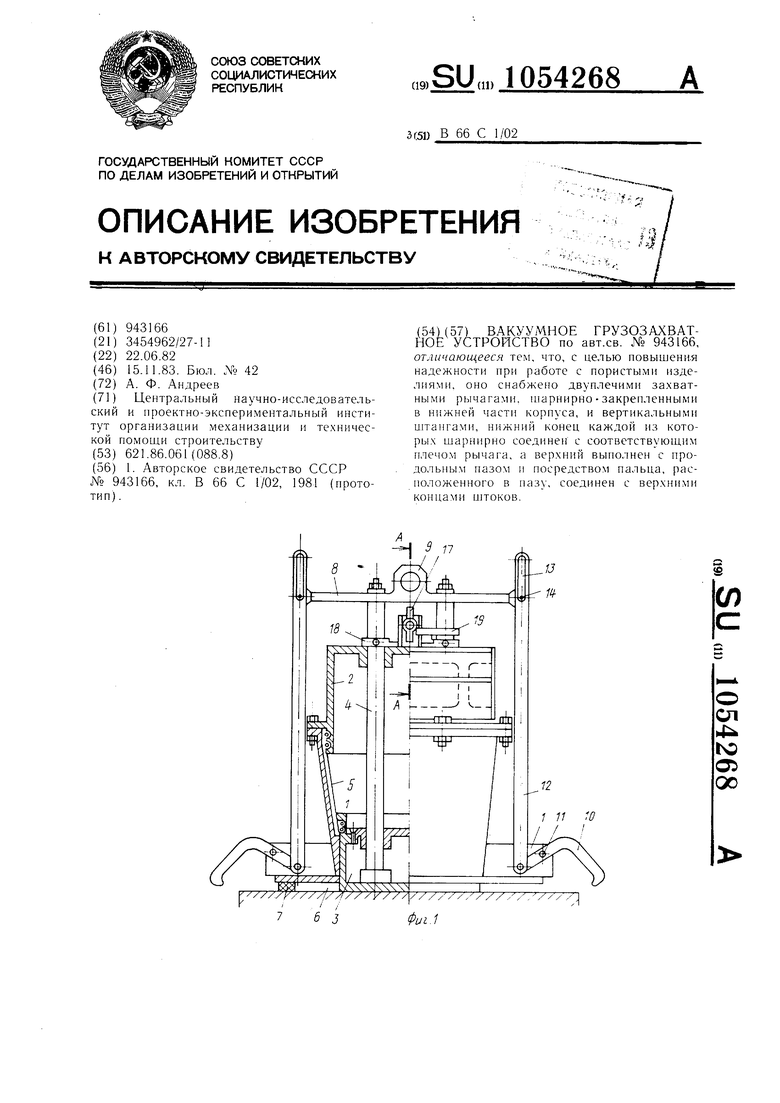
15 16 20
17
11
Фиг.г
Б-5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вакуумное грузозахватное устройство | 1980 |
|
SU943166A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
