(5) ВАКУУМНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1979 |
|
SU931646A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Вакуумное захватное устройство | 1978 |
|
SU779246A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1324980A1 |
| Вакуумный безнасосный захват | 1980 |
|
SU935427A1 |
| Вакуумное захватное устройство | 1977 |
|
SU686967A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1306881A1 |
| Вакуумное грузозахватное устройство | 1979 |
|
SU829537A1 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1199734A1 |
| Грузозахватное устройство | 1986 |
|
SU1364592A1 |



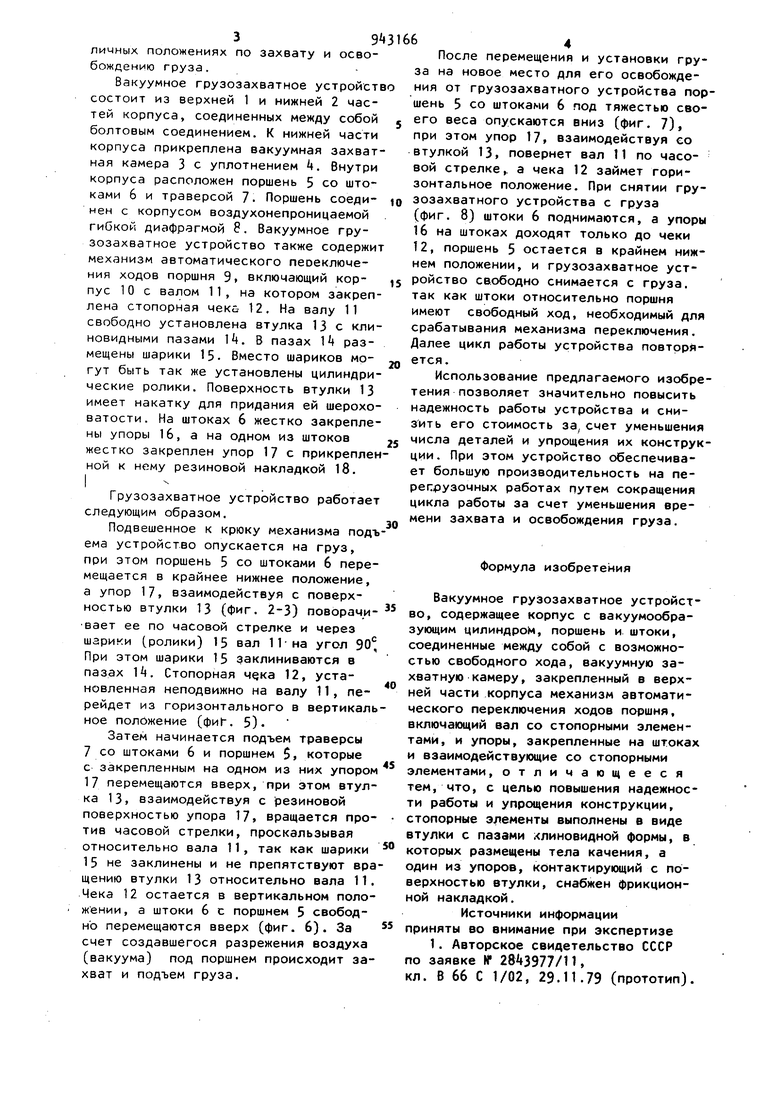
Изобретение относится к подъемнотранспортной технике, а именно к вакуумным грузозахватным устройствам, и предназначено для подъема и транспортирования различных штучных грузо преимущественно с воздухонепроницаемой поверхностью (металл, пластмассы, мрамор и т. д.). Известно вакуумное грузозахватное устройство, содержащее корпус с вакуумнообразующим цилиндром, поршень и штоки, соединенные между собой с возможностью свободного хода, вакуум ную захватную камеру, закрепленный на верхней части корпуса механизм автоматического переключения ходов поршня, включающий вал со стопорными элементами, и упоры, закрепленные на штоках поршня и взаимодействующие со стопорными элементами при перемещении штоков fl. Недостатками известного вакуумного грузозахватного устройства являют ся сложность его конструкции и недостаточная надежность в работе, так как стопорные элементы, содержащие храповое колесо с собачками и втулку с упорами, требуют большой точности изготовления и сборки, а при износе нарушается их взаимодействие с упорами штоков и не срабатывает механизм переключения ходов поршня. Целью изобретения является повышение надежности работы и упрощение конструкции устройства. Указанная цель достигается тем, что стопорные элементы выполнены в виде втулки с пазами клиновидной формы, в которых размещены тела качения, а один из упоров, контактирующий с поверхностью втулки, снабжен фрикционной накладкой. На фиг. 1 представлено вакуумное грузозахватное устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг, 2; на фиг. k - вид В на фиг. 2; на фиг, 58 - грузозахватное устройство в различных положениях по захвату и освобождению груза. Вакуумное грузозахватное устройств состоит из верхней 1 и нижней 2 частей корпуса, соединенных между собой болтовым соединением. К нижней части корпуса прикреплена вакуумная захватная камера 3 с уплотнением 4. Внутри корпуса расположен поршень 5 со штоками 6 и траверсой 7. Поршень соединей с корпусом воздухонепроницаемой гибкой диафрагмой . Вакуумное грузозахватное устройство также содержит механизм автоматического переключения ходов поршня 9 включающий корпус 10 с валом 11, на котором закреплена стопорная чекй 12. На валу 11 свободно установлена втулка 13 с клиновидными пазами . В пазах 14 размещены шарики 15- Вместо шариков могут быть так же установлены цилиндрические ролики. Поверхность втулки 13 имеет накатку для придания ей шероховатости. На штоках 6 жестко закреплены упоры 16, а на одном из штоков жестко закреплен упор 17 с прикреплен ной к нему резиновой накладкой 18. Грузозахватное устройство работает следующим образом. Подвешенное к крюку механизма подъ ема устройство опускается на груз, при этом поршень 5 со штоками 6 перемещается в крайнее нижнее положение, а упор 17, взаимодействуя с поверхностью втулки 13 (фиг. 2-3) поворачивает ее по часовой стрелке и через шзрики (ролики) 15 вал 1Гна угол 90 При этом шарики 15 заклиниваются в пазах 14. Стопорная чека 12, установленная неподвижно на валу 11, перейдет из горизонтального в вертикаль ное положение (фи|-. 5). Затем начинается подъем траверсы 7 со штоками 6 и поршнем 5, которые с закрепленным на одном из них упором 17 перемещаются вверх, при этом втулка 13 взаимодействуя с резиновой поверхностью упора 17, вращается против часовой стрелки, проскальзывая относительно вала 11, так как шарики 15 не заклинены и не препятствуют вра щению втулки 13 относительно вала 11. Чека 12 остается в вертикальном положении, а штоки 6 с поршнем 5 свободно перемещаются вверх (фиг. 6). За счет создавшегося разрежения воздуха (вакуума) под поршнем происходит захват и подъем груза. После перемещения и установки груза на новое место для его освобождения от грузозахватного устройства поршень 5 со штоками 6 под тяжестью своего веса опускаются вниз (фиг. 7), при этом упор 17, взаимодействуя со втулкой 13, повернет вал 11 по часовой стрелке,, а чека 12 займет горизонтальное положение. При снятии грузозахватного устройства с груза (фиг. 8) штоки 6 поднимаются, а упоры 16 на штоках доходят только до чеки 12, поршень 5 остается в крайнем нижнем положении, и грузозахватное устройство свободно снимается с груза, так как штоки относительно поршня имеют свободный ход, необходимый для срабатывания механизма переключения. Далее цикл работы устройства повторяется. Использование предлагаемого изобретения позволяет значительно повысить надежность работы устройства и снизить его стоимость за счет уменьшения числа деталей и упрощения их конструкции. При этом устройство обеспечивает большую производительность на перегрузочных работах путем сокращения цикла работы за счет уменьшения времени захвата и освобождения груза. Формула изобретения Вакуумное грузозахватное устройство, содержащее корпус с вакуумообразующим цилиндром, поршень и штоки, соединенные между собой с возможностью свободного хода, вакуумную захватную камеру, закрепленный в верхней части корпуса механизм автоматического переключения ходов поршня, включающий вал со стопорными элементами, и упоры, закрепленные на штоках и взаимодействующие со стопорными элементами,отличающееся тем, что, с целью повышения надежности работы и упрощения конструкции, стопорные элементы выполнены в виде втулки с пазами .линовидной формы, в которых размещены тела качения, а один из упоров, контактирующий с поверхностью втулки, снабжен фрикционной накладкой. Источники информации приняты во внимание при экспертизе 1. Авторское свидетельство СССР по заявке If 2843977/П , кл. В 66 С 1/02, 29.11.79 (прототип).
16
17 I- „ -j r j
tt
Фиг л
«
IS
фт.в
