Изобретение относится к области машиностроения, в частности к средствам управления, в котором требуется позиционирование и может найти применение в роботах-манипуляторах, станках и т.д.
Известен силовой привод, содержащий два цилиндра со штоками, связанными между собой и выходным элементом через кинематическую цепь, включающую рейки, шестерни и обгонные муфты и ограничитель хода цилиндра l .
Недостатком известного привода является ограниченное число точек поэи-ционирования и невозможность регулировки .шага выходного элемента.
Целью изобретения является расширение функциональных возможностей привода.
Поставленная цель достигается тем, что силовой прив-од, содержащий два цилиндра со штоками, связанными между ,собой и выходным элементом че.рез кинематическую цепь, включающую рейки, шестерни и обгонные муфты и ограничитель хода цилиндра, снабжен дополнительной кинематической цепью, выполненной аналогичной основной, причем основная и дополнительные кинематические цепи снабжены отключающим устройством, их шестерни связаны между собой через паразитные шестерни, а ограничитель хода снабжен уп равляющим устройством, при этом отключающее устройство может быть выполнено в виде пары электромагнитных муфт, а ограничитель хода - в виде пары винт-гайка, а управляющее устройство - в виде шагового электродвигателя, причем винт связан с электродвигателем, а гайка установлена с возможностью взаимодействия с выступом, выполненным на штоке цилиндров .
На фиг,1 представлена схема привода при работе правого цилиндра; на фиг.2 - то же, при работелевого цилиндра; на фиг.З - вид А на фиг.1 на фиг.4 - вид Б на фиг.З; на фиг.5 вид В на фиг.3.
Силовой привод содержит цилиндры 1 и 2 с установленн-ыми в них поршнями, соответственно 3 и 4 со штоками 5 и 6, связанными между собой и выходным элементом, например рукой 7 робота через основную кинематическую .цепь, включающую рейки 8 и 9, обгонные муфты 10 и 11, электромагнитные муфты 12 и 13 и шестерни 14 - 18 и дополнительную кинематическую цепь, выполненную аналогично основной и включающую рейки 19 и 20, обгонные муфты 21, 22 и шестерни 23 - 26 и электромагнитные муфты 27 и 28. Шестерни 15 и 24 связаны паразитной шестерней 29, а шестерни 17 и 25 паразитной шестерней 30, На рейках
8 и 9 на концах установлены флажки, соответственно 31, 32 и 33, 34, tlojMiни 3 и 4 установлены в цилиндрах 1 и 2 с образованием штоковых полостей 35, 36 и поршневых полостей 37 и 38,
Кроме того, привод содержит ограничитель хода для каждого цилиндра 1 и 2, включающий управляющее устройство, выполненное в виде шагового электродвигателя соответственно 39 и 40, связанных с винтами 41 и 42 на которых установлены с возможностью перемещения по направляющим 43 и взаимодё.йствия с выступами 44 и 45 гайки 46 и 47.Привод снабжен бесконтактными датчиками 48 - 51, связанными с системой управления приводом (не показаны),
Силовой прив.од может работать в двух режимах, первое - заданное перемещение кратно максимальной длине штока цилиндра, второе - заданное перемещение не кратно длине хода lUTOKa цилиндра. В первом режиме привод работает следующим образом. Исходное положение привода изображено на фиг.1. При подаче рабочей среды в поршневую полость 37 и в штоковую полость 36 поршень 3 со штоком 5 перемещается в крайнее правое Спо чертежу) положение, одновременно перемещая вправо рейку 8. При этом поступательное движение последней трансформируется во вращательное движение шестерни 14, а через обгонную муфту 10, электромагнитную муфту 3.2 во вращательное движение шестерни 1б. Будучи в зацеплении с рукой 7 робота шестерня 16 перемещает ее на величину, пропорциональную ходу поршня 3 .
При- этом обгонная муфта 11 совершает холостой ход, так как при данном направлении движения (фиг. Б), вращение на шестерню 18 не передается, поэтому во время рабочего хода поршня 3 цилиндра 1, поршень 4 цилиндра 2 совершает холостой ход. При рабочем движении поршня 3 флажок 32 перекрывает бесконтактный датчик 49, который выдает сигнал в систему управления приводом (не показана) на изменение направления подачи рабочей среды из поршневой полости 37 в штоковую полость 35. Одновременно при холостом ходе поршня 4 флажок 33 перекрывае бесконтактный датчик 51, который также подает сигнал на изменение направления подачи рабочей среды в цилиндр 2. При этом рабочая среда подается в поршневую полость 38.
Следующее перемещение руки 7 робота, пропорционсшьное ходу поршня 4 в том же направлении, осуществляется рабочим ходом цилиндра 2. Поршень 3 цилиндра 1 совершает холостой
ход, пока флажок 31 не перекроет бесконтактный датчик 48, который выдает сигнал в систему управления приводом на изменение подачи рабочей среды в цилиндр 1.
Изменение направления движения руки 7 робота осуществляется включением дополнительной кинематической цепи, в Этом случае электромагнитные муфты 12 и 13 обесточиваются, а включаются электромагнитные муфты 27 и 28. При этом наличие паразитных шестерен 29 и 30 обеспечивает противоположное движение шестерни 16, а следовательно и руки 7 робота.
В режиме, когда перемещение руки 7 робота не кратно шагу, привод работает следующим образом.
Из системы управления приводом, согласно заданной программы поступает сигнал на шаговый эле к т родя и тель 39 или 40. Гайка 46 и 47, образующая винтовую пару с винтом 41 или 42, перемещается на заданное расстояние по направляющим 43. При рабочем ходе одного из поршней 3 или 4 ипок 5 или 6 своим выступом 44 или 45 касается гайки 46 или 47, тем сам1Л4 определяя перемещение поршня 3 и 4. При этом бесконтактные датчики 48 и 51 аналогичным образом выдают команду на изменение направления подачи рабочей среды в цилиндры 1 и 2.
Положительный эффект от испольво вания предложенного привода позволяе значительно увеличить число точек позиционирования, при незначительном услож |ении кинематической цепи, что позволит расширить область его применения .
Фиг. г
BuSA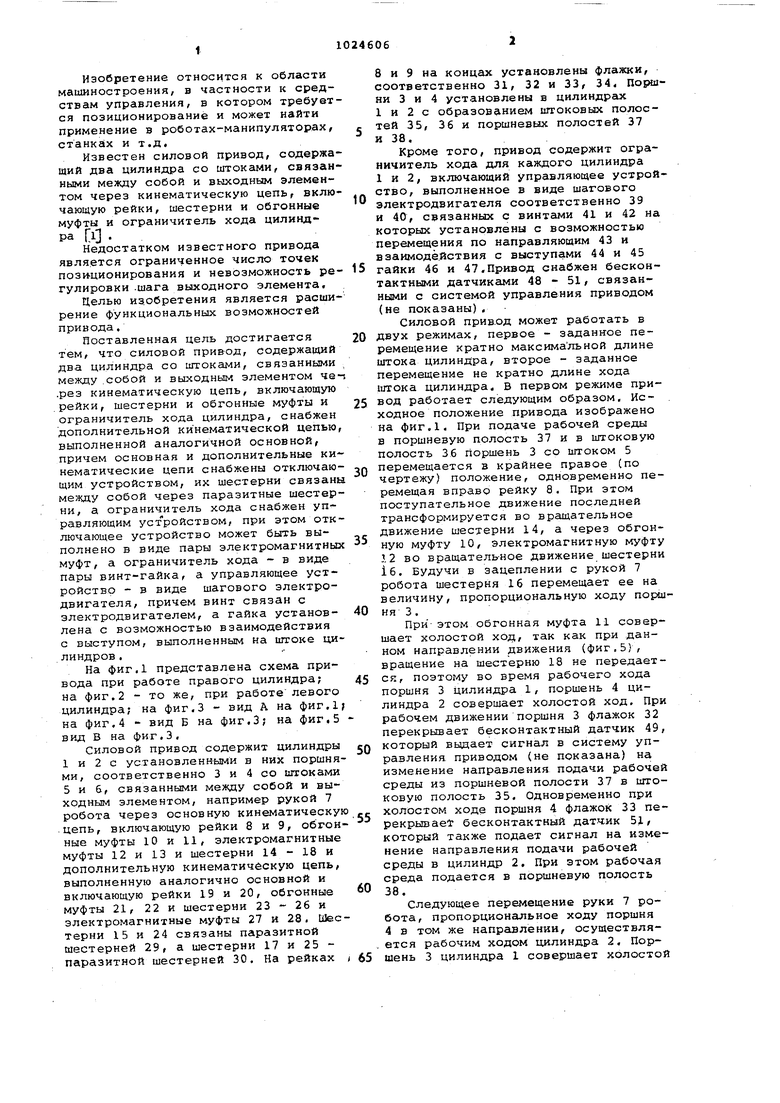

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1981 |
|
SU994256A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Поточная линия ультразвукового контроля изделий с цилиндрическими поверхностями и автомат сканирования ультразвуковым преобразователем | 1985 |
|
SU1363056A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1980 |
|
SU889226A1 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Поршневой насос | 1981 |
|
SU989140A1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1997 |
|
RU2172841C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2017 |
|
RU2677440C2 |
1. СИЛОВОЙ ПРИВОД, содержащий два цилиндра со штоками, связанными между собой и выходным элементом через кинематическую цепь, вк/дачающую рейки, шестерни и обгонные муфты и ограничитель хода цилиндра, отличающийся тем что, с целью расширения функциональных возможностей, он снабжен дополнитель4S ной кинематической цепью, выполненной аналогичной основной, причем основная и дополнительные кинематические цепи снабжены отключающим устройством, их шестерни связаны между собой через паразитные iiiecTepHH, а ограничитель хода снабжен управляющим устройством. 2.Привод по п. 1, отличающийся тем, что отключающее устройство выполнено в виде пары электромагнитных муфт. 3,Привод поп, 1, отличающийся тем, что ограничитель хода выполнен в виде пары винт-гайка, а управляющее устройство - в виде шагового электродвигателя, причем винт связан с электродвигателем, а (Л гайка установлена с возможностью взаимодействия с выступом, выполненным на штоке цилинда ов. 3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU364766A1 | |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
