Изобретение относится к машине строению, а именно к вспомогательному оборудованию, используемому при автоматизации технологических процессов.
Известен механизм выдвижения рабрчего органа манипулятора, содержащий силовой цилиндр СИ.
. Недостатками известного механизма являются невысокая надежность его работы из-за износа уплотнений а также низкая грузоподъемность.
Наиболее близким к изобретению по технической сущности и достигаемому результату является телескопический механизм вьщвижения рабочего органа манипулятора, содержащий неподвижное звено, основное и дополнительное подвижные звенья, две пары зубчатых реек, одна из которых смонтирована на неподвижном звене, и силовой привод .с подвижным элементом, на котором смонтирован блок шестерен, размещенный с возможностью взаимодействия с губчатыми рейками 2,
Недостатком известного механизма является невысокая точность пермещения рабочего органа наличия в нем гибкого тягового органа.
Целью изобретения является повышение точности позиционирования.
Указанная цель достигается тем, что в телескопическом механизме вьщвижения рабочего Органа манипулятора, содержащем неподвиж7 нов звено, основное и дополнительно подвижные звенья,две пары зубчатых реек,одна из которых смонтирована н неподвижном звене, и силовой привод с подвижным элементом, на котором смонтирован блок шестерен, размещенных с возможностью взаимодействия с зубчатыми рейками, вторая пара зубчатых реек смонтирована на дополнительном подвижном звене, а подвижный элемент силового привода шарнирно связан с основным подвижным звеном.
На фиг. 1 изображен телескопический механизм вьадвижения рабочего органа манипулятора, общий вид, на фиг. 2 - разрез А-А на фиг. 1.
Телескопический механизм выдвижения рабочего органа манипулятора содержит неподвижное звено 1, внутрикоторого по роликам 2 перемещается первое подвижное звено 3. В направляющих первого подвижного звена перемещается на роликах 4 и 5 второе подвижное звено 6, равное по длине первому подвижному звену, с закрепленным на его конце рабочим органом 7. Привод установлен на неподвижном звене и состоит из электродвигателя 8 и винтовой шариковой передачи с винтом 9 и гайКой 10. Гайка шарниром 11 связана с первым подвижным звеном. На кронштейне 12, установленном на гайке, крепится ось 13, на которой расположены шестерни 14, входящие в зацепление с рейками 15, и шестерни 16, входящие в зацепление с рейками 17, находящими/ся на втором подвижном звене.
Механизм работает следующим образом.
При включении электродвигателя 8 выходной вал которого соединен с винтом 9, начинает вращаться и толкать гайку 10 и связанное с ней первое подвижное звено. Шестерни 14, толкаемые гайкой через кронштейн 12, обкатываются по рейкам 15 и вращают шестерни 16, которые в свою очередь передают усилие при вода на второе подвижное звено и выдвигают его. Причем скорость и величина перемещения второго подвижного звена зависит от соотношения числа зубьев шестерен 14 и 1 Длина второго подвижного элемента должна быть не меньше длины первог подвижного элемента,в этом случае величина перемещения рабочего органа получается в полтора раза болше, чем габариты механизма, что осбенно важно при обслуживании закрытых прессов, подштамповая плита которых достигает иногда 3 м.
По сравнению с базовым объектом использование изобретения позволяв ет повысить точность позиционирования рабочего органа манипулятора
15,
П
4 6 Фиг.г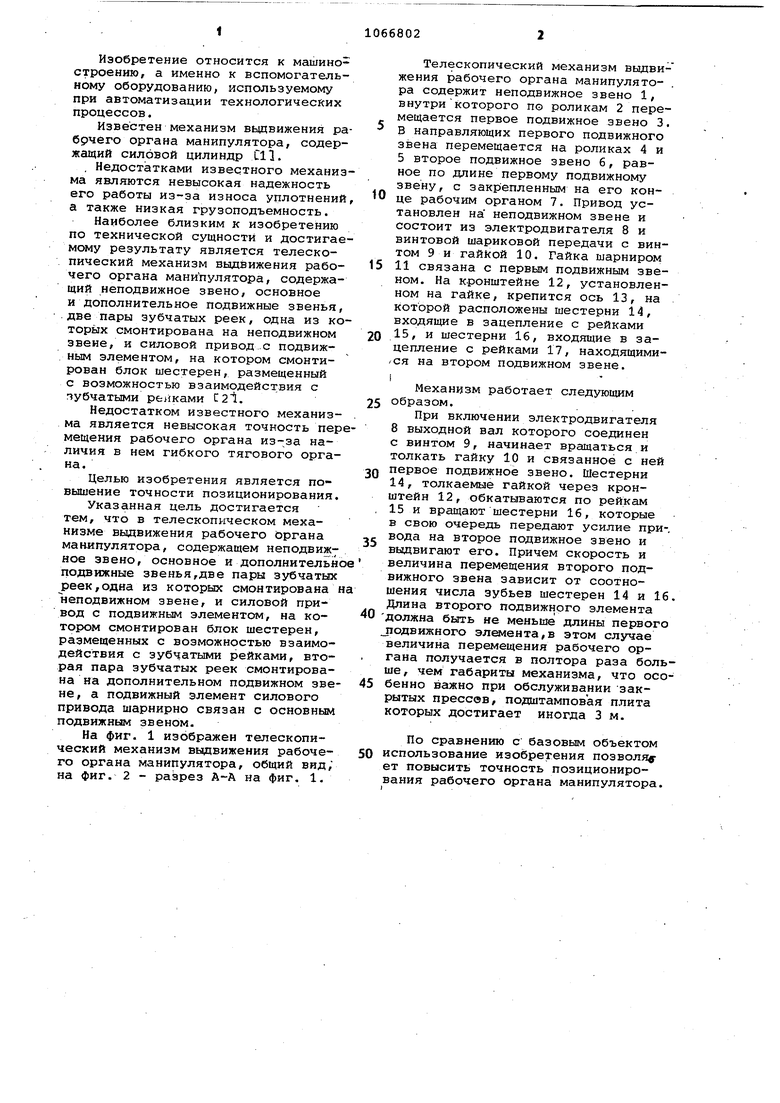
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Шаговый конвейер | 1982 |
|
SU1082712A1 |
| Устройство для изгибания арматурной проволоки в зигзагообразные изделия | 1990 |
|
SU1729666A1 |
| ДВУРУКИЙ МАНИПУЛЯТОР | 1994 |
|
RU2069146C1 |
| Механизм перемещения секций телескопической стрелы | 1986 |
|
SU1368255A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| Манипулятор | 1985 |
|
SU1284820A1 |
| Стан для накатки зубчатых колес | 1989 |
|
SU1613232A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
ТЕЛЕСКОПИЧЕСКИЙ МЕХАНИЗМ ВЬЩВИЖЕНИЯ РАБОЧЕГО ОРГАНА МАНИПУ ЛЯТОРА, содержащий неподвижное звено, основное и дополнительное подвижные звенья, две пары зубчатых реек, одна из которых смонтирована на неподвижном звене, и силовой привод с подвижным элементом, на котором смонтирован блок шестерен, размещенных с возможностью взаимодействия с зубчатыми рейками, отличающийся тем, что, с целью повыиения точности позиционирования, вторая пара зубчатых реек смонтирована на дополнительном подвижном звене, а подвижный элемент силового привода шарнирно связан с основным подвижным звеном. О) С
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1976 |
|
SU598753A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Телескопический механизм выдвижения рабочего органа | 1977 |
|
SU663578A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
