1
Изобретение относится к машиностроению, а именно к схватам манипуляторов для захвата деталей и их перемещения в пространстве, и может быть использовано для механизации и автоматизации различных технологических процессов.
Цель изобретения - упрощение конструкции, повышение надежности работы схвата путем исключения произволного раскрытия губок.
На чертеже изображен схват манипулятора.
Схват манипулятора содержит корпус 1, силовой цилиндр 2, рьмаги 3 и 4 шарнирно-рьгчажного механизма раскрытия залдамных губок 5. Внутри поршня 6 силового цилиндра имеется полость, в которой установлены допо нительные поршни 7 и 8, разделенные между собой и поршнем силового цилиндр пружинами 9 и 10. Полость с обеих торцовых сторон за счет отверстий сообщаетс с надпоршневым и подпоршневым прост- ранствйми силового цилиндра. Площад любого дополнительного поршня больш площади поршня силового цилиндра. Штоки 11 - 13 дополнительных поршне и поршни силового цилиндра соединены телескопически. И Л-ок 1 1 подпружинен относительно силового цилиндра пружиной 14, На штоке 13 поршня 6 закреплена траверса 15, шарнирно связанная с рычагами 3 и 4, На шток 11 установлены упор 16 и траверса 17, на которой шарнирно установлены подпружиненные защелки 18 и фиксаторы 19. Фиксаторы 19 при помощи шатунов 20 связаны со штоком 12. Рычаги 4 подпружинены относительно корпуса 1 пружинами 21 и на них шарнирно установлены упоры 22 и неподвижно - фиксаторы 23. Защелки 18 подпружинены пружинами 24 относительно штока 1 1 .
Схват манипулятора работает сле- дуюпщм образом.
В исходном состоянии поршень 6 вместе с установленными в нем дополнительными поршнями находится в вернем положении. Рычаги 4, несупдае зажимные губки, разведены. Подпружиненные защелки 18 вьюедены из зацепления с фиксаторами 19 и располага
ются над упорами 22. При.подаче эне гоносителя (например, воздуха) в надпоршневое пространство начинает движение поршень 8, так как масса .
10
15
-2о25
30
35
40
45
50
55
поршня 6 и связанных с ним элементов больше массы поршня 8 и штока 11, а силы трения его о цилиндр 2 и силы упругости пружины 2 рычагов 4 больше сил упругости пружин 10 и 14, которые сжимаются. Выдвижение внутреннего потока 1 1 относительно охватывающего его штока 12 ведет к повороту фиксаторов 19 к оси захвата,что облегчает вхождение в них защелок 18- при их взаимодействии с упорами 22, С движением поршня 6 происходит перемещение траверсы 15 и поворот рычагов 4. Губки сходятся. Защелки 18, удерживаемые фиксаторами 19 в горизонтальном положении, за время сближения губок перемешаются за неподвижные фиксаторы 23.
В случае внезапного сброса давления в системе подачи энергоносителя под действием сил упругости сжатых пружин 10 и 14 иток 11 сдвигается вверх. Шток 12 входит в контакт с упором 16, вызвав поворот фиксаторов 19 в сторону подпружиненных защелок 18. Одновременно подпружиненные за- шелки 18 своими выступами входят в зацепление с выступами неподвижных фиксаторов 23. Чем больше величина падения давления в цилиндре, тем -с большей силой подпружиненные защелки действуют на неподвижные фиксаторы 23.
Дпя освобождения детали из захвата энергоноситель подается в подпорш- невое пространство. Под действием сил .упругости, пружин 1 О и 1 4 и давления в подпорщнёвом пространстве поршни 7 и 8 вместе со штоками 11 и 12 начинают перемещаться вверх. Неподвижные фиксаторы 23 задерживают под- пр-ужиненные защелки 18 вместе со штоком 11 и поршнем 8, а поршень 7 со штоком 12 продолжают движение вверх. Поршень 6 ,остается неподвижным,так как рычаги 4 удерживаются защелкАми 18. С перемещением штока 12 осуществляется поворот фиксаторов 19 и освобождение защепок 8, которые под действием пружин 24 разворачиваются к оси схвата. Рабочие элементы подпружиненных защелок 18 и неподпружиненных фиксаторов 23 выполнены так, что при повороте подпружиненных защелок они легко выходят из зацепления с неподвижными фиксаторами. Одновременно начинается движение поршня 6 и раскрытие губок 5 рычагов 4,
3U70500.4
Форм у л а и.3 обретения силового цилиндра и связанные с ними
штоки, установленные телескопичесСхват манипулятора, содержащийки внутри ттока силового цилиндра,
корпус, силовой цилиндр с поршнем, .каткдый рычаг, несущий губку, снабжен
шарнирно-рычажной механизм, имеющийжестко закрепленными фиксаторами, а
защелки и зажимные губки, каждая изупор установлен на рычаге с в озможкоторых установлена на рычаге с упо-ностью поворота, при этом наружный
ром для защелки, отличающий-шток одного из дополнительных поршс я тем, что, с целью упрощения Qней имеет шарнирно связанные с ним
конструкции и повышения надежностификсаторы, а защелки подпружинены,
работы схвата путем исключения про-установлены на внутреннем штоке друизвольного раскрытия губок, он содер-гого дополнительного поршня и имеют
жит дополнительные подпружиненны§возможность взаимодействия с фиксапоршни, установленные внутри поршняторами рычагов и штока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Схват | 1980 |
|
SU1046085A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Захватное устройство | 1986 |
|
SU1351779A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват манипулятора | 1986 |
|
SU1366391A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват промышленного робота | 1985 |
|
SU1350002A1 |
| Схват манипулятора | 1985 |
|
SU1268403A1 |
Изобретение относится к области машиностроения, а именно к схватам манипуляторов для удерживания деталей и их перемещения в пространстве, и может быть использовано для механизации и автоматизации различных технологических процессов. Цель изобретения - упрощение конструкции, повышение надежности работы схвата путем исключения произвольного раскрытия губок. Внутри поршня 6 силового цилиндра 2 установлены дополнительные поршни 7 и 8. В обеих торцовых пластинах поршня 6 силового цилиндра возможны отверстия для сообщения энергоносителя с надпоршневой и подпоршневой полостями силового цилиндра. На штоке 11 дополнительного поршня 8 установлены упор 16 и траверса 17, на которой шарнирно расположены подпружиненные защелки 18 и фиксаторы 19. Фиксаторы 19 при помощи шатунов 20 связаны с полым истоком 12 дополнительного поршня 7. На рычагах 4 механизма раскрытия губок 5 шарнирно установлены упоры 22 и неподвижные фиксаторы 23. 1 ил.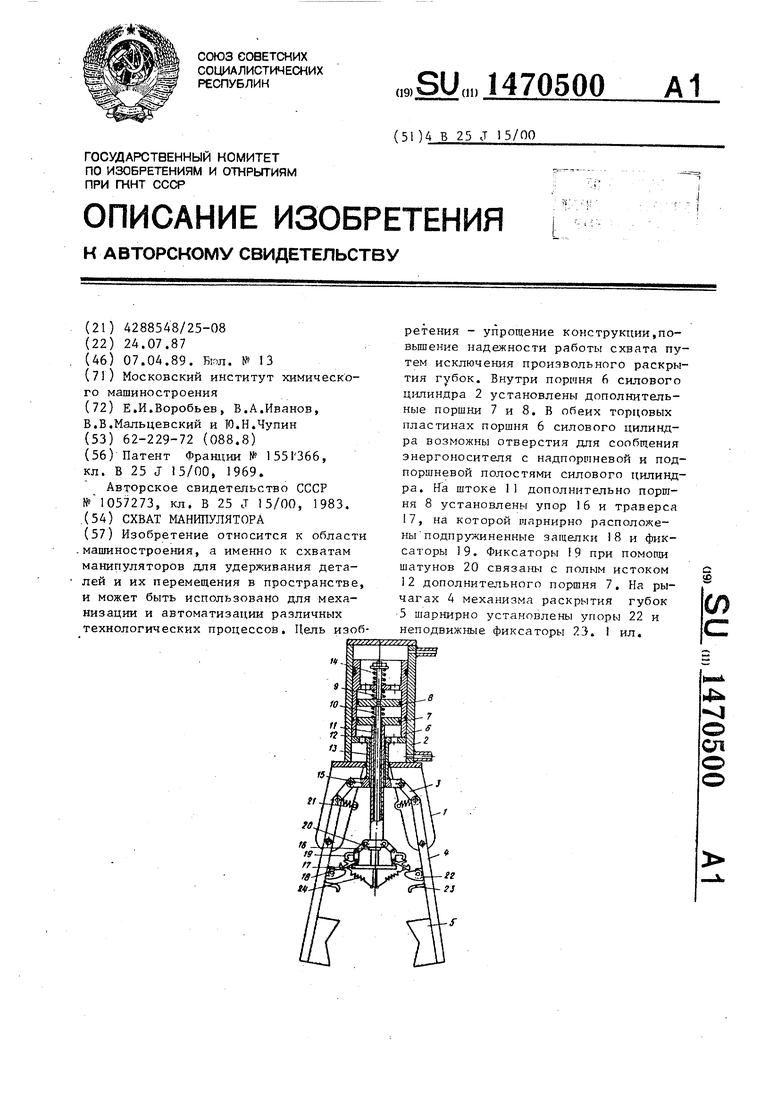
| Способ эндопротезирования проксимального конца бедра | 1986 |
|
SU1551366A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
