О1
4;
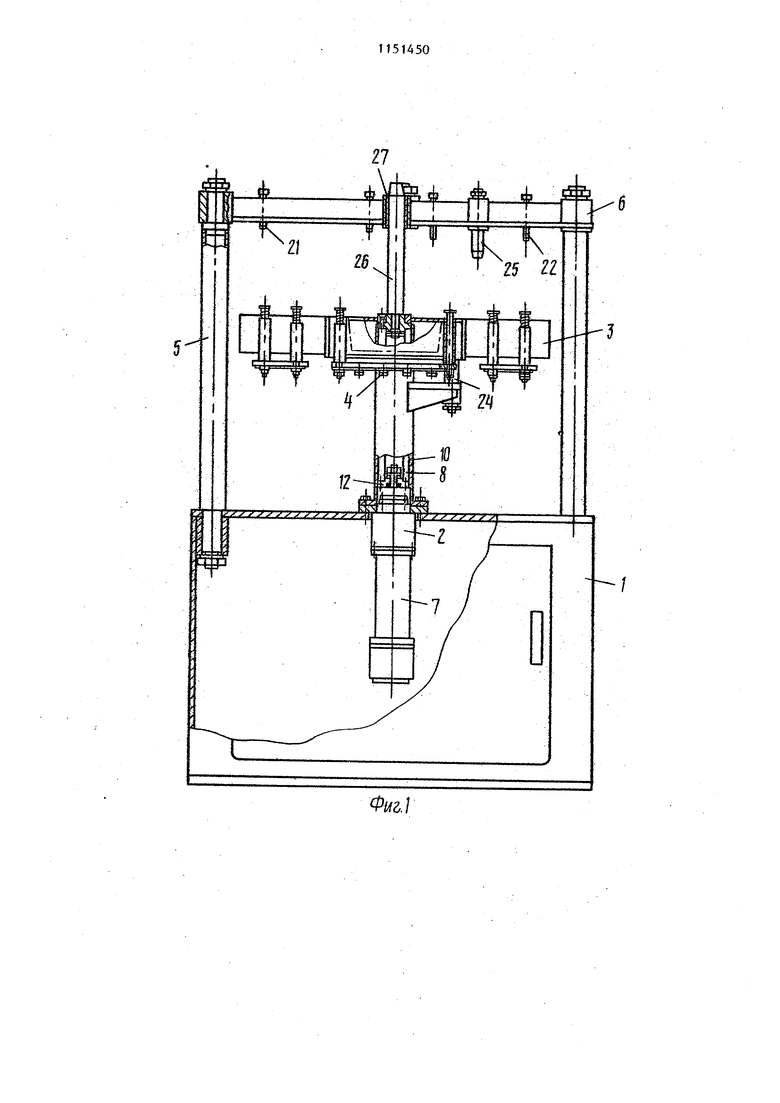
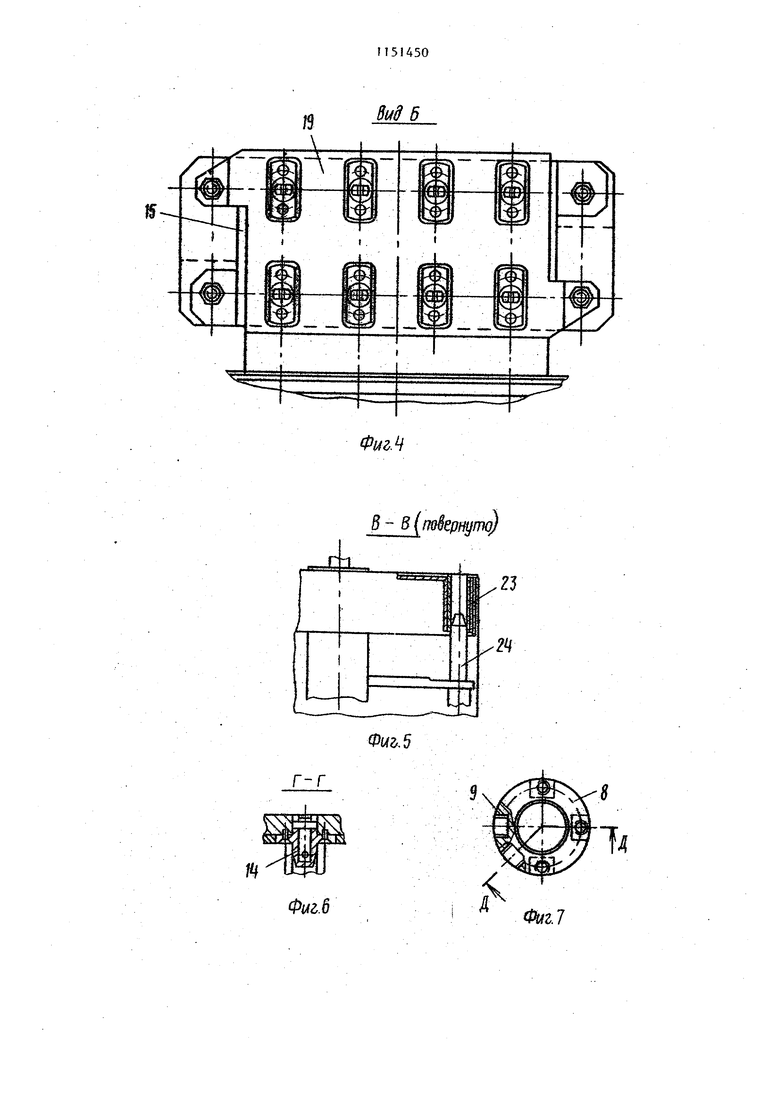
О1 Изобретение относится к масмностроению и может быть использовано для транспортировки деталей. Известен манипулятор, содержащий основание, привод, выполненный в ви де силового гхилиндра, шток которого связан с барабаном, перемепики мся в неподвижном корпусе, и схваты, смонтированные на подвижной траверсе, закрепленной на барабане lj. Недостатком известного манипулятора является низкая надежность работы. Цель изобретения - повьшение надежности в работе манипулятора. Цель достигается тем, что манипу лятор, содержа1 й основание, привод вьтолненный в виде силового цилиндра, шток которого связан с барабаном, перемещающимся в неподвижном корпусе, и схваты, смонтированные н подвижной траверсе, закрепленной на барабане, снабжен двумя плитами, не подвижной траверсой с центральной втулкой и штоком, закрепленным на подвижной траверсе и размещенным в центральной втулке неподвижной траверсы, при этом плиты размещены на подвижной траверсе посредством подпружиненных скалок с возможностью возвратно-поступательного перемещения, причем схваты закреплены на од ной из плит, а в другой плите вьтол нены отверстия, оси которьк совпада ют с осями схватов, и величина пере мещения этой плиты больше величины перемещения первой плиты, кроме тог на неподвижной траверсе и корпусе закреплены дополнительно введенные пальцы, взаимодействую 1ие с подвижной траверсой. На Лиг. 1 изображен манипулятор, обв{ий вид; на фиг.2 - то же.,вид сверху на фиг. 3 - сечение А-А на Лиг. 2; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - сечение В-В на фиг. 2; на фиг. 6 - сечение Г-Г на фиг. 3; на фиг. 7 - барабан, вид сверху;на фиг еечение Д-Д на фиг. 7; на фиг. 9 развертка по наружному диаметру бар бана.. Манипулятор состоит из основания 1, привода 2, подвижной траверсы 3, вьяолненной мйогорукой (в конкретно примере, приведенном на фиг. 2 - в виде крестовины), на каждой руке которой установлены пружинно-рычажные схваты 4. На основании 1 при яо 502 мощи трех скалок 5 закреплена жесткая неподвижная траверса 6. Привод 2 состоит из силового цилиндра 7,шток которого связан с барабаном 8, снабженным фигурными пазами 9. Барабан может перемещаться внутри неподвижного корпуса 10, который снабжен роликом 11. При сообщении барабану возвратно-поступательного перемещения ролик 11 занимает в пазу ряд последовательных положений, в результате чего при подъеме барабана до верхнего положения он поворачивается на 1/2 деления (43), при опускании еще на 1/2 дeлeни,. Поворот барабана относительно штока цилиндра 7 обеспечивается наличием упорных подишпников 12. На подвижной траверсе 3, которая закреплена на барабане 8 и может перемещаться вместе с ним, закреплены схваты 4, вьтолненные в виде двух подпружиненных рычагов 13, установленных с возможностью углового поворота в оправке 14, имеющей конический конец. Схваты служат для удержания деталей типа втулок на внутренний диаметр. Схваты (блок из восьми штук) закреплены на плите 15, которая установлена на двух скалках 16 в расточках траверсы 3. Скалки 16 под действием пружин 17 стремятся занять положение, показанное на фиг.З. На двух других скалках 18 установлена плита 19, в которой имеются отверстия, расположенные концентрично относительно посадочных поверхностей схватов 4. Плита 19 стремится занять положение, показанное на фиг. 3, под действием пружин 20. На неподвижной траверсе 6 имеются пара жестких упоров 21, расположенных таким образом, что они могут взаимодействовать со скалками 16 в верхнем положении траверсы 3, и пара жестких упоров 22, которые могут взаимодействовать со скалками 18 в верхнем положении траверсы 3. На траверсе 3 имеются четьфе направляюрдих втулки 23, одна из которых после очередного перемещения траверсы одевается на неподвижный палец 24, закрепленньй на корпусе 10 (в нижнем положении траверсы 3), или на палец 25, закрепленньпЧ на траверсе 6 (в верхнем положении траверсы 3) Пальцы 24 и 25 смещены относительно друг друга на половину угла поворо3
та траверсы. Подвижная тргверса 3 снабжена штоком 26, который перемещается во втулке 27 траверсы 6.
-Манипулятор предназначен для захвата изделий со спутника 28 транспортера, переноса их на позицию 29, на которой производится операция механической обработки с помощью многошпиндельной силовой головки 30 переноса их на следующую позицию и сброса в тару 31.
Манипулятор работает следующим образом.
Спутник 28, на котором установлены восемь деталей, поступает в зону загрузки манипулятора. цилиндра 7 опускается, увлекая за собой траверсу 3, которая опускаясь. Поворачивается, фиксируется втулкой 23 по пальцу 24 и подводит схваты А к изделиям. В конце хода корпусные оправки 14, центрируя изделие, входят внутрь деталей, которые удерживаются подпружиненными рычагами 13. Затем силовой цилиндр перемещает траверсу 3 из нижнего положения в верхнее. Траверса 3 фиксируется в верхнем положении, одной из втулок 23 по пальцу 25, и в конце хода верхние торцы скалок 16 очередной группы схватов упираются в упоры 21
504
траверсы 6. Плита 15, в которой установлены схваты, несущие детали, под действием упоров отводится от траверсы 5, увлекая за собой и плиту 19. Силовая головка 30 совершает рабочее перемещение, включается вращение шпинделей и производится операция механической обработки - подрезка торцов и снятие фасок. Осевые
усилия, возникакяцие при групповой механической обработке, не воспринимаются подвижной траверсой 3 и не передаются на силовой привод, а замыкаются на жестких упорах 21 неподвижной траверсы 6.
Точность позиционирования изделий обеспечивается благодаря наличию центрального штока 26 и периферийньос пальцев 24 и 25, взаимодействующих с
втулками 23 траверсы 3. При очередном повороте траверсы 3 изделия переносятся в зону выгрузки, в которой находится тара 31. В конце подъема траверсы верхние торцы скалок 18 доходят до упоров 22, пружины 20 сжимаются, плита 19 опускается, отводится от плиты 15 и, перемещаясь на величину несущего участка схвата, сбрасывает изделия с рычагов 13 в тару 31.
Использование изобретения позволит повысить надежность работы. Ось транспортера . Фш.2 Д-А
Вид 6
ФигМ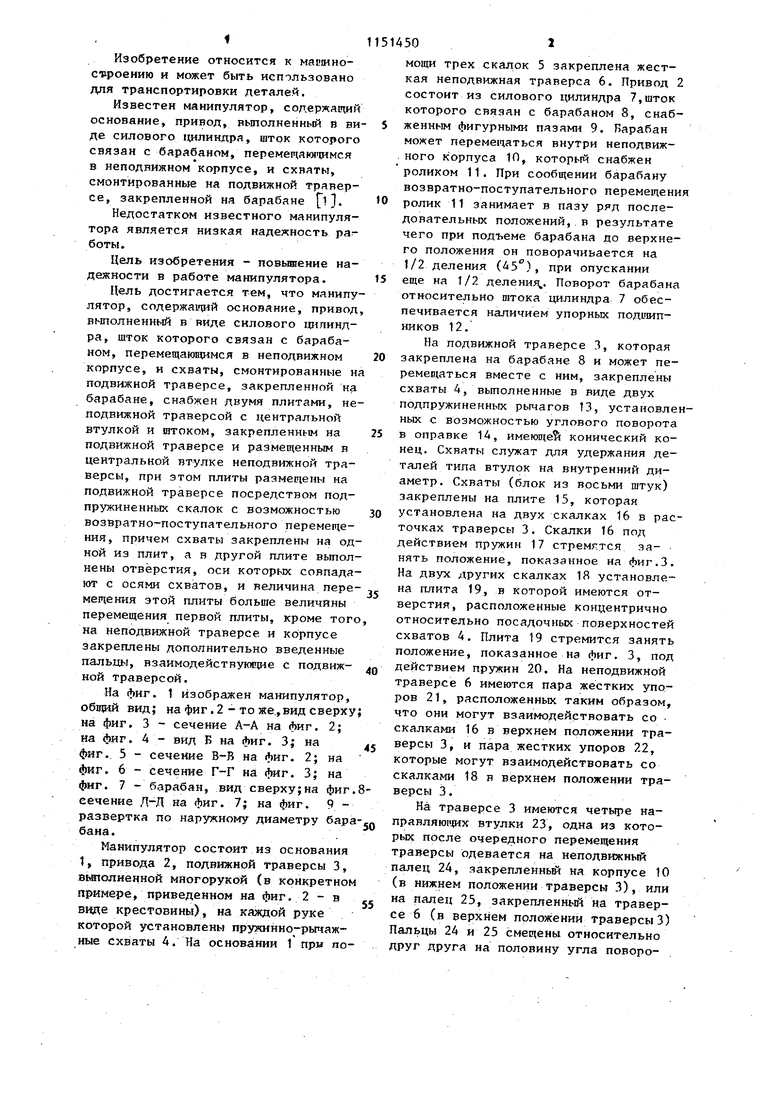

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для контактной стыковой сварки | 1977 |
|
SU662306A2 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| Металлорежущий станок с устройством для автоматической смены многошпиндельных коробок | 1988 |
|
SU1521552A2 |
| Устройство для подрыва, фиксации и извлечения отливок из постоянных литейных форм | 1979 |
|
SU772711A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Способ сборки редукторов и устройство для его осуществления | 1990 |
|
SU1754403A1 |
| АГРЕГАТ ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ СТРОИТЕЛЬНЫХ СМЕСЕЙ | 2001 |
|
RU2203802C1 |
| Кокильная машина | 1979 |
|
SU835622A1 |
| Автоматическая линия штамповки изделий с лезвиями | 1984 |
|
SU1255256A1 |


МАНИПУЛЯТОР, содержапшй основание, привод в виде силовогоцилиндра, шток которого связан с барабаном, корпус и схваты, смонтированные на подвижной траверсе, закрепленной на барабане, отличающийся тем, что, с целью повьппения надежности в работе, он снабжен двумя плитами, неподвижной траверсой с центральной втулкой и штоком, закрепленным на подвижной траверсе и размещенным в центральной втулке неподвижной траверсы, при этом плиты размещены на подвижной траверсе посредством подпружиненных скалок с возможностью возвратно-поступательного перемещения, причем схваты закреплены на одной из плит, а в другой плите выполнены отверстия оси которых совпадают с осями схватов, и величина перемещения этой плиты больше величины перемещения первой плиты, кроме того, на неподвижной траверсе и корпусе закреплены дополни(Л тельно введенкые пальща, взаимодействующие с подвижной траверсой.
8 - В (по ернупю)
Г-Г
.д J-Д Фиг.8 Фиг. 9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
