1
Изобретение относится к станкостроению, а . конкретно к конструкциям загрузочных устройств, и может быть использовано в роторно конвейерных маиганах обработки и сборки.
Известно загрузочное устройство роторноко1шейерной машины для сборки втулочнороликовой цепи, содержащее ротор, выполненный в виде смонтированных на приводном валу конического диска с лотками для подачи элементов сборки цепи, отсекателей и звездочки, и цепь для переноса элементов сборки, выполненную с подвижными в осевом направлении от связанного с приводным валом йопира штырями по элементы сборки, установленную с возможностью взаимодействия с упомянутой звездочкой. Л
Од11ако в случае отказа неисправности одной из загрузочных позиций ротора загрузки на штыри цепи для перекоса не будет вьщана пластина или блок, в результате чего под развальцовку может уйти нескомплектованная цепь. Чтобы этого не произошло, после ротора загрузки устанавливают на пути перемещения цепи для переноса элементов сборки прерыватель, реагирующий на отсутствие элемента в сборке, останавл1№ающего машину для ручной подпитки пластинами сборки втулочнороликовой цепи.
Целью изобретения является повышение надежности устройства.
Поставленная цель достигается тем, что зат узочное устройство роторно-конв.ейерной маишны для, сборки вг}лочно-роликовой цепи, содержащее ротор, выполненный в виде смонтированных на приводном валу конического диска с лотками для подачи элементов сборки цепи, отсекателей и звездочки, и цепь для переноса элементов сборки, выполненную с подвижными в осевом направлении от связанного с приводным валом копира штырями под элементы сборки, установленную с возможностью взаимодействия с указанной звездочкой, снабжено дополнительным копиром, связанным с приводным валом, отсекатели выполнены в виде подвижных от дополнительного копира в осевом направлении и расположенных в плоскости симметрии лотков ползунов с жестко закрепле1шыми на их концах упорами, каждый из которых расположен между двумя соседними штырями транспортной цепи.
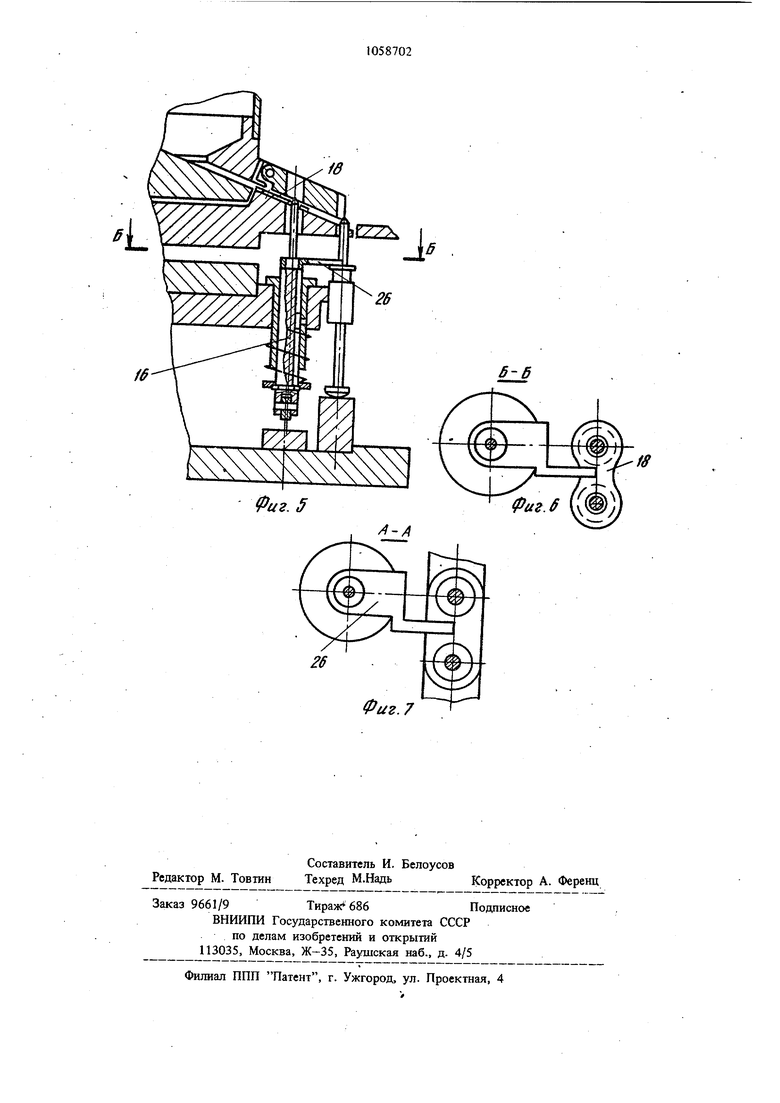
На фиг. 1 изображена роторно-конвейерная машина, общий вид; на фиг, 2 - ротор загрузки, общий вид; на фиг. 3 - схема расположения ротора загрузки в роторно-конвейерной машине; на фиг. 4 - положение ползуна с упором при отсутствии пластины на штырях транспортной цепи; на фиг. 5 - положение ползуна с упором при наличии пластины
587022
S на штырях транспортной цепи; на фиг. 6 сечение Б-Б на фиг. 5; на фиг. 7 - сечение А-А на фиг. 4
Роторно-конвейерная машина включает ро5 торы загрузки 1-3 нижней, верхней пластинами и блоком, ротор загрузки ва;шками 4 и технологические роторы 5. Ротор загрузки 1 вь1Полнен в в.иде стакана 6, закрепленного на станине 7. В стакане 6 расположен корпус 8,
10 связанный со стаканом 6 через подшипники 9. С корпусом 8 жестко соединены зубчатое колесо 10, связанное с приводом вращения (не показан), барабан 11 и конический диск 12. Внутри корп1/са 8 размещен вал 13, несущий 5 на себе ворошмтель 14, расположенный в бункере 15. В равномерно расположенных по окруяаюсТи отверстиях барабана 11 размешены отсекатели в виде подпружиненных относительно барабана 11 ползунов 16 со стерж20 ними 17 отажания деталей (пластин или блоков) 18, получающих осевое перемещение от дополнительного копира 19, установленного на стакане 6. С барабаном 11 жестко связана звездочка 20, огибаемая цепью 21 для перено25 са элементов сборки со штырями 22, получающими перемещение в осевом направлении от копира 23 и являющимися ложементами для размещения деталей 18. На диске 12 вьшолнены равномерно расположенные и радиально ,Q шправле1шые лотки 24 для перемещения де,талей 18 из бункера 15 к ложементам транс|портной цепи 21. На стакане 6 жестко закреп |лен ограничитель 25, ограничивающий перемеЩение деталей 18 из лотков 24 диска 12. На коще каждого ползуна 16 жестко закреплен упор 26, направленньш в сторону, противоположную оси ротора так, чтобы он располагался между соседними штырями 22 цепи для переноса элементов сборки 21. Указанная цепь 21 огибает звездочку 27 и дважды огибает ротор загрузки по звездочке 20, что позволяет обеспечить при первом подходе загрузку деталями 18 штырей 22, при втором подходе, уже к другим лоткам, загрузку пустых позиций, ложементов, образованных парами щтырей 22 цепи 21.
Загрузочное устройство роторно-конвейерной машины работает следующим образом.
После включения машины одновременно с техническими роторами начинают вращаться и
роторы загрузки 1-3, подавая в лотки 24 из бункера 15 детали 18, которые перемещаются по лоткам 24 до ограничителя 25, что позволяет отверстиям деталей 18 расположиться на диаметре ротора. На участке -огибания ротора 55 загрузки для переноса элементов сборки 21 ползуны 16 от дополнительного копира 19 получают осевое перемещение вверх, увлекая за собой стершш 17 отсекателя дета3Юлей 18. При этом стержень 17 входит в отверстие предыдущей детали 18, препятствуя ее дальнейшему пЬремсщению по лотку 24. Одновременно от копира 23 П9лучают осевое перемещение вверх и штыри 22 цепи 21. При этом штыри 22 захватывают, выводят деталь 18 из лотка 24 и перемещают ее по траектории перемещения цепи 21. Однако не из всех лотков 24 могут быть выданы детали 18 на штыри 22 цепи 21, поэтому цепь 21 подводят к ротору загрузки вторично так, чтобы позиция цепи 21 с двумя штырями 22 (ложеMSHT под деталь 18) не подошла к тому же лотку 24,К которому она подходила при первом огибании ротора загрузки. Такой принцип увеличивает вероятность подхода позиции цепи 21 к заполненному деталями 18 лотку 24. При STOM упор 26, закрепленный на ползуне 16 и производящий контроль наличия деталей 18 на штырях 22, расположится между двумя соседними штырями 22 одного ложемента выще уровня расположения детали 18 на цепи 21 На участке вторичного огибания цепи 21 ротора загрузки производится повторная попытка загрузить пустые позиции цепи деталями 18.
/2
/
(риг. г 2 Для этого под действием дополнительного копира 19 и пружины ползун 16 получает осевое перемещение вниз. Если деталь 18 имеется в наличии на штырях 22 цепи 21, упор 26, упяраясь в детали 18, препятствует перемещению ползуна 16, в результате чего стержень 17 не выходит из лотка 24 и продолжает удерживать деталь 18 от перемещения по лотку 24. При отсутствии детали 18 на штырях 22 цепи 21 ползун 16 с упором 26 беспрепятственно перемещается вниз вьюодит стержень 17 из лотка 24, освобождая тем самым детали 18 для перемещения по лотку 24 до ограничителя 25. При ходе вверх штырей 22 от копира 23 они захватывают деталь 18, остановившуюся около ограничителя 25, после чего транспортная цепь 21 выводит ее из ротора загрузки. Такое выполнение загрузочного устройства по сравнению с прототипом позволит производить надежное заполнение всех ложементов цепи для переноса элементов сборки, что, соответственно, увеличит надежность работы роторно-конвейерных машин, производящих сборку втулочно-роликовь1х цепей.
Фиг.У
л.A t9
ф«9. f,nj тш Фиг. 7

| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная машина | 1982 |
|
SU1046068A1 |
| Загрузочное устройство роторно-конвейерной машины | 1985 |
|
SU1255262A1 |
| Роторно-конвейерная машина для сборки пильной цепи | 1981 |
|
SU1042871A1 |
| Роторно-конвейерная машина для сборки цепей | 1981 |
|
SU948059A1 |
| Автоматическая роторно-конвейерная машина для сборки пильных цепей | 1986 |
|
SU1409403A1 |
| Ротор загрузки штучными заготовками | 1982 |
|
SU1024220A1 |
| Роторный питатель | 1983 |
|
SU1079402A1 |
| Автоматическая роторно-конвейерная линия для сборки цепей | 1989 |
|
SU1708484A1 |
| Роторно-конвейерная машина | 1987 |
|
SU1532300A1 |
| Роторный автомат питания | 1983 |
|
SU1114517A1 |

ЗАГРУЗОВДОЕ УСГЮЙСТВО ЮТОРНО-КОНВЕЙЕРНОЙ МАШИНЫ ДЛЯ : СВОРКИ ВТУЛОЧНО-ЮЛЙКОВОЙ ЦЕПИ, содержащее ротор, вьшолненный в виде смонгароваяных на приводном валу конического диска с лотками для подачи элементов сборки цепи,-ютсекателей и звездочки, и цепь для переноса элементов сборки, выполненную с подвижными в осевом направлении от связан ного с приводным валом копира штырями под лемен;1Ы сборки, установленную с возможностью взаимодействия с указанной звездр всой, отличающееся тем. что, с целысг повышения надежности, оно (яюбжено дополнительным KoirapoM, связанным с приводным валом, отсосатепи выполнены в виде подвижных от дополнительного копира в осевом направлении и расположешагх в шпкжос;1И симметрии лотков ползунов с жестко за- крепленными на их ксжцах уасфами, каждый из которых рашоложен между двумй соседни ми штырями траншортной цош. t/) С QI 06 si о N3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
