110 Изобретение относится к приборостроению и может быть использовано при создании многокоординатных измерителей положения объекта относительно базы отсчета. Известен трехкоординатный датчик лине1аи и )тловых перемещений, содержащий корпусТ ведущее звено, преобразователь пикейных пере мещений, механизм кинематической связи ведущего звена с преобразователем линейных пе ремещений, две взаимодействующие с ведущим звеном поворотных дуги с продольными пазами, оси качания которых взаимно перпендикулярны, и два преобразователя угловых перемещений, связанных с упомянутыми поворопшми дугами l. Недостатком данного устройства является ограниченность его функциональных возможностей, поскольку он позволяет определить только лш1ейные йеремещешш, но не позволяет определить угловое положение. , Известно также устройство для определения положения объекта относительно основания, содержащее два кардановых подвеса с датчиками угла на осях, на внутренних рамках которых закреплены соответственно втулка и ра положенная в ее полости щтанга, между которыми размещен датчик перемещения, причем один из кардановых подвесов вьшолнен двухстепенньш и установлен на основании, а второй связан с фланцем, прикрепляемым к объекту .2. Недостатком известного устройства является ограниченность его функциональных возможностей, поскольку оно не измеряет третью угловую координату объекта для определения углового положения тела и приходится производить сложные вычисления. Целью изобретения является распшреще функциональных возможностей и упровдение вычислений при определении коорданат. Указанная цель достигается тем, что /в устройстве, содержащем ;да5 кардановых прдвеса с датчиками угла на осях, на внутренних рамках которых закреплены соответственно втулка и расположенная в ее полости штанга, между которыми размещен датчик перемещения, причем один из кардановых подвесов выполнен двухстепенным и установлен на основании, а второй связан с фланцем, прикрепляемым к объекту, кардановый подвес, связанный с фланцем, вьшолнен трехстепенным, а оси внутренних рамок кардановых подвесов зафиксированы параллельно пут вьшолнения плоских граней на сопрягаемых поверхностях щтанги и втулки. На чертеже представлена кинематическая схе ма предложенного устройства для определения положения объекта относительно основания. Устройство содержит двухстепенный кардановый подвес с наружной рамкой 1 и внутренней рамкой 2 с закрепленной на ней втулкой 3. На осях рамок двухстепенного подвеса установлены дагиоси 4 и 5 углов поворота. Устройство также содержит трехстепенный кардановый подвес с внутренней рамкой 6, промежуточной рамкой 7 и наружной раской 8, причем на внутренней рамке б закреплен один конец измерительной штанги 9, второй конегх которого установлен во втулке 3 двухстепенного подвеса с возможностью поступательного движения. Измерительная щтанга 9 выполнена многогранной, благодаря чему обеспечивается тираллельность осей внутренних рам подвесов. На осях рамок трехстепенного подвеса установлены датчики 10 - 12 угла поворота. Для креплегаш на основании 13, относительно которого производятся измерения, двухстепенньп кардановый подвес снабжен фланцем 14, установочная плоскость которого параллельна оси шружной рамки 1. Для крепления к объекту 15 на время проведения измерений устройство со стороны трехстепенного карданового подвеса снабжено выходным фланцем 16, который может свободно вращаться на опорах вокруг оси наружной рамки 8. Установочная плоскость фланца 16 параллельна оси вращения промежуточной рамки 7. Устройство работает следующим образом. При помо1ЩИ фл&нца 14 устройство закрепляют на основании 13, относительно которого производят измерения, при помощи фланца 16 - к объекту 15, угловые и линейные координаты которого необходимо определить. Снимают показания с да1тчиков 4, 5, 10, И и 12 угла поворота и да«ика перемещения щтанги. В первом приближении линейные координаты объекта 15 определяются длиной штанги 9 (отрезок о-. ) и величинами углов, снимаемых с датчиков 4 и 5 угла поворота. При необходимости точного определения линейных координат объекта 15 учнтьшают расстояние ОО,(, а также расстояние OrpOj совместно с величинами углов на датчиках 4, 5 и 10, 11. Угловые коордашаты объекта определяются вычислениями по показаниям датчиков 4, 5, 10, 11 и 12 угла поворота, причем показание с ttfcpoocA 12 угла поворота дает непосредственно третью угловую координату объекта, вторая угповая координата определяется как разность показаний датчиков 5 и 10, а первая угловая координата объекта определяется по показанию датчиков 4 и 11 с учетом разности показаний датчиков 5 и 10. .Предлагаемое устройство, в. отличие от известного, позволяет определить все координаты
j10594174
объекта, a именно три линейных и три угловых леяьвость ioceff внутревянх рам карязяовых под координаты, причем благодаря выполнеияю штан- весов, что упрощает процедуру вычисги многогранной при работе сохраняется парал- леннй.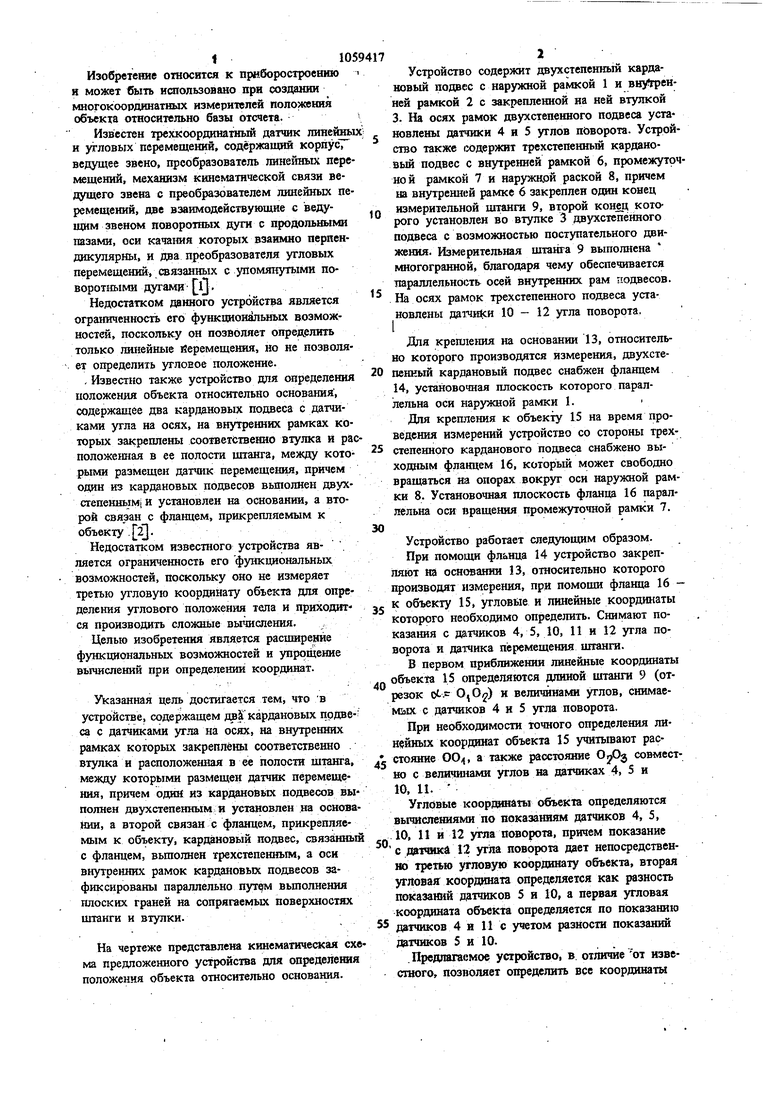
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ОТНОСИТЕЛЬНО ОСНОВАНИЯ, содержащее два кардановых подвеса с датчиками угла иа осях, на внутренних ртмках которых, закреплены соответственно втулка и распЬложенная в ее полости опанга, Меяоду которыми размещен датчик перемещения, причем одан из кардановых под весов вьшолнен двухстепенным и установлен на основании, а второй овязан с фланцем, прикрепленным к объекту, отличающееся тем, 4го, с целью расишрения функциональных возможностей и упрощения вычисяешш при сшределении координат, кардановый подвес, связанный с фланцем, вьшолнен трехст(Я1е1Шым, а скэт внутренних рамо(с кардановых подмесовГ зафиксированы параллельно путем выполнения плоских граней на сопрягаемых поверхностях штанги и втулки. СП 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Трехкоординатный датчик линейных и угловых перемещений | 1974 |
|
SU513236A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
