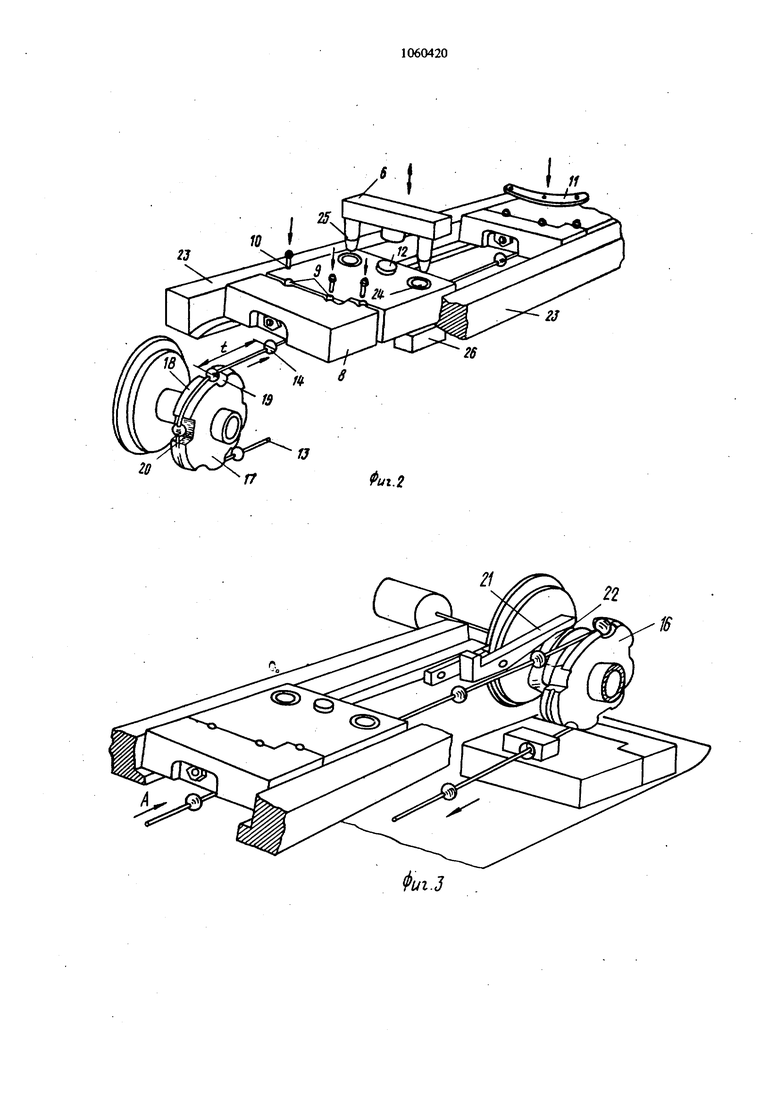
Изобретение относится к сборочному обору дованию и может быть использовано для автоматизации сборки и клепки узлов в приборостроении. Известна транспортная система для несинхрон ных автоматических линий, содержащая привод- ную и натяжную станции тягового элемента, приспособления-спутника для перемещения изделий и механизмы останова приспособленияспутника 1. Недостатком известной транспортной системы является сложность ее конструкции. Цель изобретения - упрощение конструкции системы. Для достижения указанной цели в транспортной системе, содержащей приводную и натяжную станции тягового злемента, приспособления-спутники для перемещения изделий и механизмы останова приспособления-спутника, тяговый элемент выполнен в виде бесконечного троса с напрессованными с постоянным щагом шариками, а приспособления-спутники снабжены подпружиненными фиксаторами, предназначенными для взаимодействия с указанными щариками тягового элемента, при зтом на ведущей и ведомой звездочках приводной и натяжной станций выполнены чередующиеся пазы для зацепления шариков и приспособлений-спутников. На фиг. 1 представлена несинхронная автом тическая линия с транспортной системой; на фиг. 2 - транспортная система в положении загрузки изделий; на фиг. 3 - то же, в поло жении перехода приспособления-спутника на возвратную ветвь транспортера; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - сечение Б-Б на фиг. 4. Линия с гибкой транспортной системой содержит плавающие приспособления-спутники 1, приводную 2 и натяжную 3 станции, технологические позиции сборки, включающие в себя устройство 4 ориентации и поштучной вьщачи деталей, сборочную головку 5. Линия содержит механизмы 6 останова спутника и расклепывающий механизм 7. Приспособленияспутники 1 содержат механизм зажима, снабженный подпружиненной губкой 8 с разъемом и базирующими призмами 9 по центрам распо ложения осей 10 (относительно базовой детали И), взаимодействующий с механизмом 6 останова (и базирования) спутника через кл ноплунжерную пару .12. Тяговый элемент вы1002 полней в виде бесконечного троса 13 с щариками 14, напрессованными с постоянным шагом и взаимодействующими со спутниками, снабженными подпружиненными фиксаторами 15. Ведущая 16 и ведомая 17 зведочки содержат зубья 18 с чередующимися пазами 19 для зацепления щариков и пазами для зацепления спутников 20, причем приводная станщш 2 снабжена отсекателем спутников, выполненным в виде рычага 21, взаимодействующего с кулачком 22, связанным с ведущей звездоч кой 16. Расклепьгеающий механизм 7 выполнен в виде блока для групповой клепки качающимся инструментом. Плавающие приспособленияспутники 1 расположены в направляющих 23 с возможностью перемещения и,имеют отверстия 24 для базирования по ловителям 25, связанным с механизмом 6 останова спутника. На каждой технологической позиции установлены датчики 26. На последней позиции установлен манипулятор 27 для съема собранных узлов. Линия работает следующим образом. Приспособления-спутники 1 с помощью тягового элемента в виде троса 13 с шариками 14 перемещаются по направляющим 23 вдоль технологических позиций. При подходе спутника к позиции загрузки от датчика 26 автоматически включается механизм 6 останова спутника, ловители 25 базируют спутник по отверстиям 24. Упор механизма останова через кпиноплунжерную пару 12 разводит губку 8, а из устройства 4 ориентации и поштучной вьщачи деталей оси 10 подаются в спутник на базирующие призмы 9 и зажимаются подпружиненной губкой 8 после отхода упора в верхнее положение, В момент останова спутника и за время выполнения операций фиксатор 15 пропускает шарики 14, за счет чего на других позициях в это время спутники могут перемещаться тяговым органом. На позициях сборки и клепки механизм останова спутника совмещен с устройством сборки и клепки. На позиции сборки на оси 10 напрессовывается базовая деталь 11, а на позиции клепки оси 10 развальцовьшаются. На последйей позиции осуществляется съем собранных узлов с помощью манипулятора 27. Отсекатель спутников в виде рычага 21 служит для распределения спутников по пазам ведущей звездочки. По нижней ветви приспособленияспутники возвращаются на исходную позицию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система для несинхронных автоматических линий | 1976 |
|
SU738835A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ НЕСИНХРОННЫХ АВТОМАТИЧЕСКИХ ЛИНИЙ | 1993 |
|
RU2083349C1 |
| Конвейерное устройство | 1982 |
|
SU1044560A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Конвейер для несинхронных поточных линий | 1987 |
|
SU1553443A1 |
| Вертикально-замкнутый пластинчатый конвейер пульсирующего типа | 1972 |
|
SU485927A1 |
| Поточная линия для изготовления металлоконструкций | 1980 |
|
SU961911A1 |
| Несинхронная автоматическая линия | 1982 |
|
SU1058758A1 |
| Приспособление-спутник | 1981 |
|
SU921779A1 |
| Транспортное устройство автоматической линии | 1982 |
|
SU1013214A1 |

ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ НЕСИНХРОННЫХ АВТОМАТИЧЕСКИХ ЛИНИЙ, содержащая приводную и натяжную станции тягового элемента, приспособления-спутники для перемещения изделий и механизмы останова приспособления-спутника, ртл ичающ а я с я тем, что, с целью упроще1дая конструкции системы, ее тяговый элемент выполнен в виде бесконечного троса с напрессованными с постоянным тагом щариками, а приспособления-спутники снабжены подпружиненными фиксаторами, предаазначенными для взаимодействия с указанными щариками тягового элемента, при этом на ведущей и ведомой звездочках приводной и натяжной станций выполнены чередующиеся пазы для зацепления щариков и приспособлений-спутников. (Л
У////уЖМ
8ид/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Транспортная система для несинхронных автоматических линий | 1976 |
|
SU738835A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
