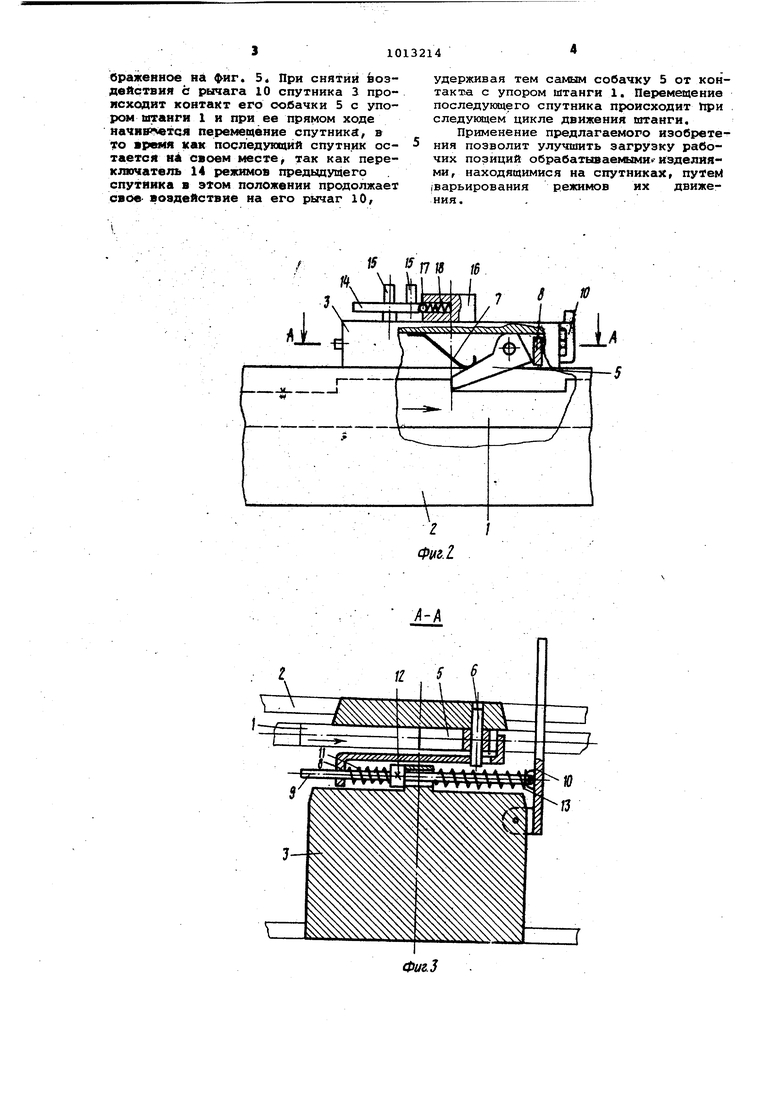
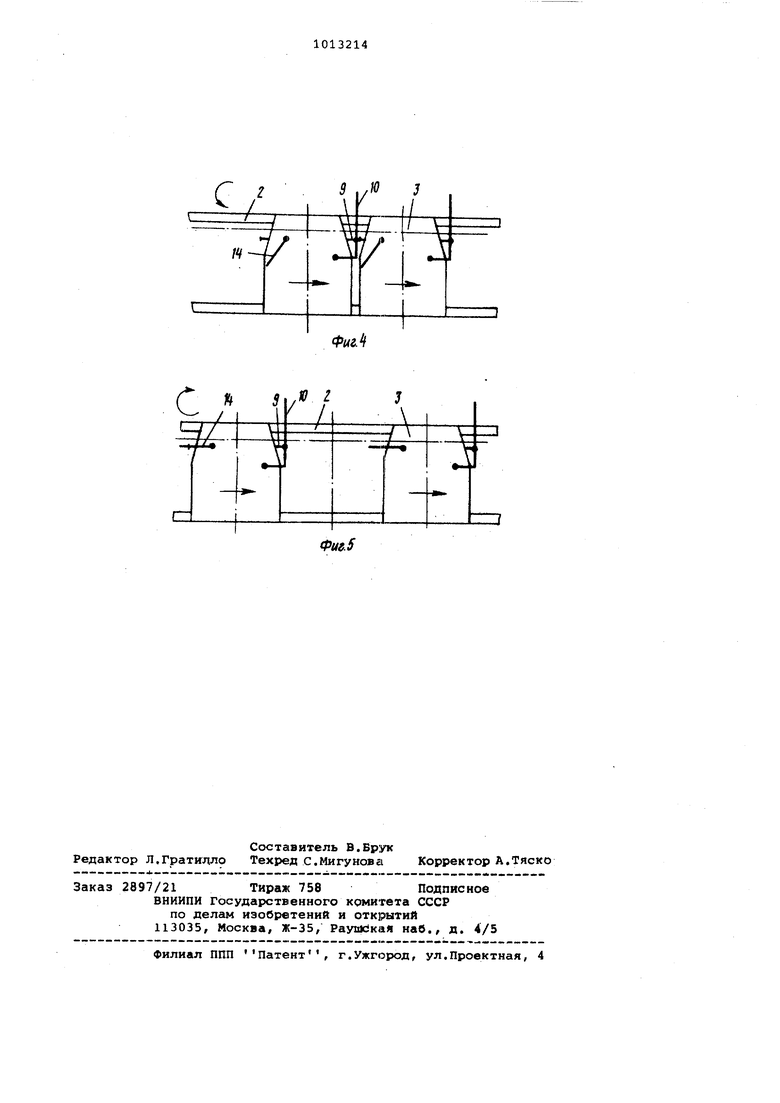
.,1 Изобретение относится к машиностр ению, в частности к средс вам транспортирования в многопозиционных автоматических линиях, и может быть ис пользовано, для синхронного и несинхронного перемещения обрабатывае1 1ых изделий в спутниках между технологическими позициями при металлообработ ке и сборке. Известно транспортное устройство автоматической линии,содержащее штангу с упорами г направляввдие с расположенными на них спутниками, каждый из которых имеет управлянадий элемент и собачку, контактирующую с упорами штанги, и механизмы останова спутников 1 . Данное устройство обеспечивает пе ремещение спутника на рабочую позицию только после того, как предьздущий спутник ее освободит, т.е. на следующем цикле движения штанги. Такое несинхронное перемещение спутников между рабочими позициями не позволяет организовать на линии участок с синхронно работакяцими позициями. Целью изобретения является расширение технологических возможностей устройства путем обеспечения перемещения и обработки деталей в спутника в синхронном и несинхронном режимах. Эта цель достигается тем, что в транспортном устройстве, содержащем штангу с.упорами, направляющие с рас положенными в них спутниками, каждый из которых имеет управляющий элемент и собачку, контактирующую с упорами штанги, и механизмы останова спутников, на направляющих выполнены высту пы, а каждый спутник снабжен подЛ эужиненным штоком и рычагом, связанным через дополнительно введенную тягу с собачкой. Рычаг установлен с возможностью взаимодействия с подпружиненным штоком предыдущего спутника, причем управляющий элемент расположен на спутнике с возможностью взаимодействия с выступами на направляющих и рычагом последующего спутника, На фиг. 1 изображено транспортное устройство , вид сверху; на фиг. 2 участок транспортного устройства, вид спереди; на фиг. 3 - разрез А-А на фиг. 2; на Фиг. 4 - схема движения спутников в синхронном режиме; на фиг. 5 - то же, в несинхронном рна жиме. Транспортное устройство автоматической линии содержит штангу 1, направляющие 2, расположенные в них спутники 3, механизмы 4 останова спутников. Спутник в нижней части Kopnjs a содержит собачку 5, установленную на оси 6 и подпружиненную пластинчатой пружиной 7. На свободном конце оси 6 с возмож ностью контактирования с собачкой установлена 2-образная тяга 8, в отверстие которой с другой стороны вставлен шток 9, шарнирно связанный с рычагом 10. а-образная тяга 8 подпружинена пружиной 11, упираклцейся в фиксатор 12, жестко установленный на штоке 9. Рычаг 10 подпружинен,пружиной 13. На корпусе спутника установлен управляющий элемент в виде переключателя 14, имеющего для взаимодействия его с выступами, установленными на направляющих, два ролика 15, Для обеспечения фиксированных положений переключателя на корпусе установлен фиксатор 16, имеющий шарик 17 и пружину 18. Транспортное устройство работает следующим образом. При включении кривошипно-шатунного привода штанга 1 получает возвратно-поступательное движение. Перемещение спутников 3 по направляющим 2 на величину шага происходит во время прямого хода штанги 1. Собачки 5 спутников в это время под действием пластинчатой пружины 7 находятся в нижнем положении и контактируют С упором штанги 1,: Для остановки ступников 3 на рабочих позициях механизм 4 останова спутников воздействует на рычаг 10 лоследнего, при этом шток 9 выдвигается и через фиксатор 12, пружину 11 перемещаетй-образную тягу 8, которая в свою очередь, контактируя с со бачкой 5, поворачивает ее вокруг оси б, отсоединяя тем самым ее от упора штанги 1. Пластинчатая пружина 7 при этом изгибается собачкой 5. Последую щий спутник останавливается таким же воздействием на его рычаг Ю выдвинутого штока 9 предыдущего ступника. Обеспечение различных режимов движения спутников 3 происходит следующим образом. При синхронном режиме движения переключатель 14 режимов на спутнике 3 предварительно устанавливается в положение изображеннЪе на фиг. 4, путем воздействия выступа, показанного стрелкой, на один из роликов 15 переключателя 14 при подходе спутника к этому участку линии. При выключении механизма останова 4 спутников, т.е. снятии воздействия, с рычага 10 спутника 3, его выдвинутый шток 9 одновременно снимает также воздействие с рычага 10 последующего спутника, и происходит одновременный контакт их собачек 5 с упорами штанги 1 и перемещение спутников 3 между позициями при ее прямом ходе. При подходе спутников 3 к участку линии с несинхронным режимом движения выступ в направлении, указанном стрюлкой, переводит переключатель 14 режимов на спутнике 3 воздействием на другой ролик 15 в положение, изображенное на фиг. 5« При снятии воздействия с рычага 10 спутника 3 происходит контакт его собачки 5 с упором штанги 1 и при ее прямом ходе перемещение спутнике, в то время как последующий спутник остается на своем месте так как переключатель 14 режимов предьщущего спутника в этом положении продолжает свое- воздействие на его рычаг 10/
удерживая тем самым собачку 5 от контакта с упором штанги 1. Перемещение последукнцего спутника происходит при следукнцем цикле движения штанги.
Применение предлагаемого изобретения позволит улучшить загрузку рабочих позиций обрабатываемыми -изделиями, находящимися на спутникахг путем (Варьирования режимов их движения.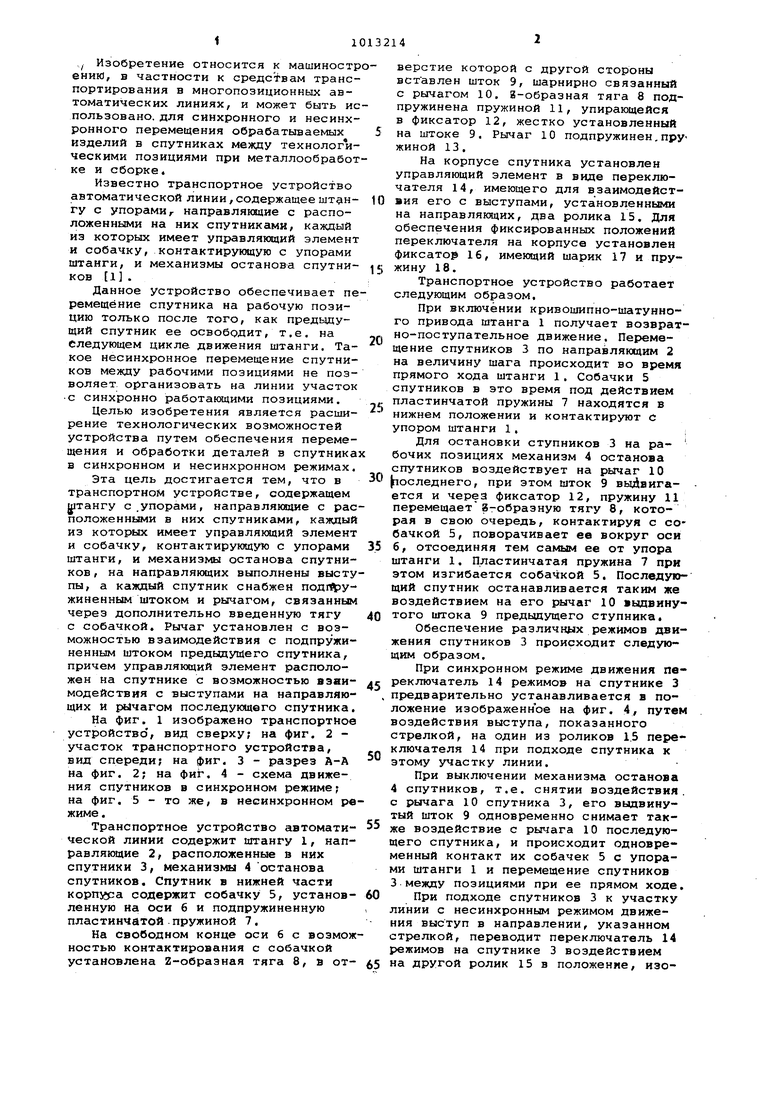
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерное устройство | 1982 |
|
SU1044560A1 |
| Гибкая автоматическая линия | 1989 |
|
SU1662808A1 |
| Транспортная система для несинхронных автоматических линий | 1976 |
|
SU738835A1 |
| Автоматическая линия спутникового типа | 1983 |
|
SU1133070A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Конвейер | 1986 |
|
SU1313775A1 |
| Линия спутникового типа | 1989 |
|
SU1646798A1 |
| Подающее устройство | 1987 |
|
SU1447722A1 |
| Установка для аргонодуговой сварки поворотных стыков труб неплавящимся электродом с подачей присадочной проволоки | 1990 |
|
SU1776528A1 |
ТРАНСПОРТНОЕ УСТРОЙСТВО АВТСШАТИЧБСКОЙ ЛИНИИ, содержащее штангу с упорами, направляющие с расположенными на них спутниками, каяшый из котоЕшх имеет управляющий элемент и собачку, контактирующую с. упорамиштанги, и механизмы останова спутников, отличающееся тем, что, с целью раскшрения технологических возможностей путем обеспечения перемещения и обработки деталей в спутниках в синхронном и несинхронном режимах, на направляющих выполнены выступы, а каждь1й спутник снабжен подпружиненным штоком и рычагом, связанньм через дополнительную введенную тягу с собачкой, рычаг установлен с возможностью взаимодействия с подпружиненным штоком предыдущего спутника/ причем управляющийэлемент расположен на спутнике с возможностью взаимодействия с выступами на направляющих и рычагом последующего спутника. ..§ со IND 4 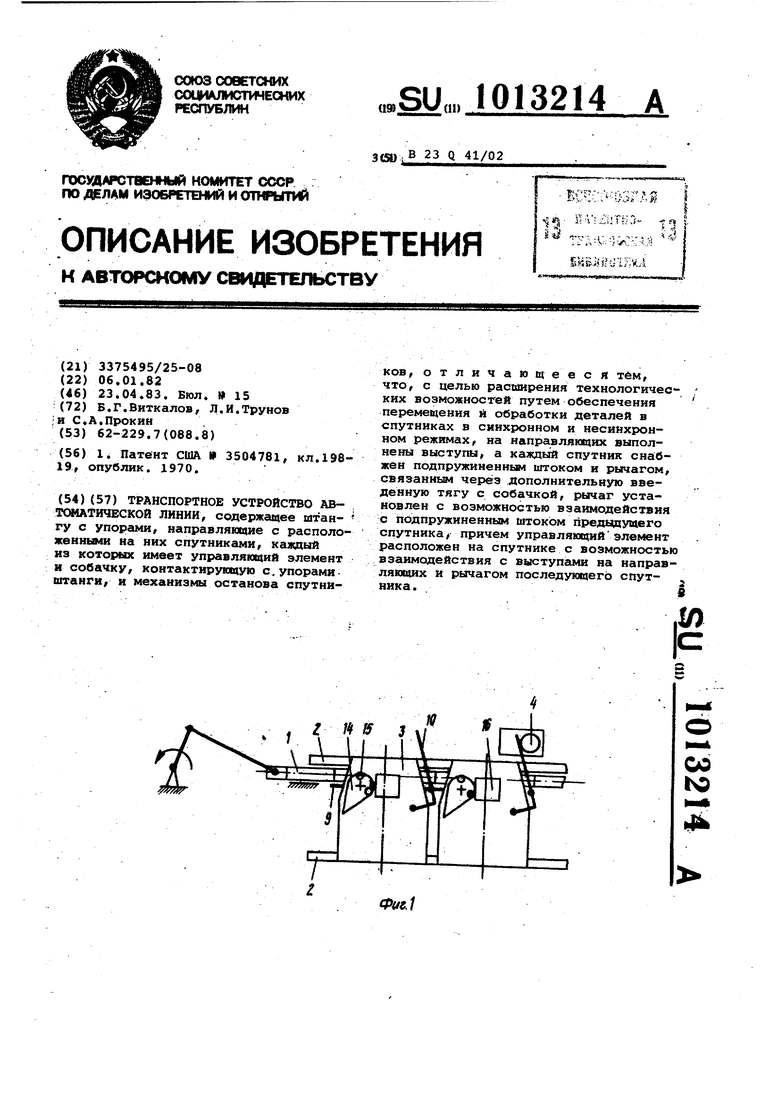
vJlfe
f(7 №
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3504781, кл.19819, опублик | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
