31553ИЗ
положение С 2 с ТЦ 1 сохраняется доуходит вверх, расцепляясь с ТЦ 1.
момента, пока штырь 18 не проходитАналогично происходит расцепление с
за пределы полки 2k и не выжимаетсяТЦ 1 третьего и т.д. С 2, т.е. накопрычагом-копиром 26. Упор Н, сцепленный с рычагом 16 и штырем 18, резко
ление задела С 2 на рабочей позиции. 6 ип.
ТЦ 1 третьего и т.д. С 2, т.е. накопление задела С 2 на рабочей позиции. 6 ип.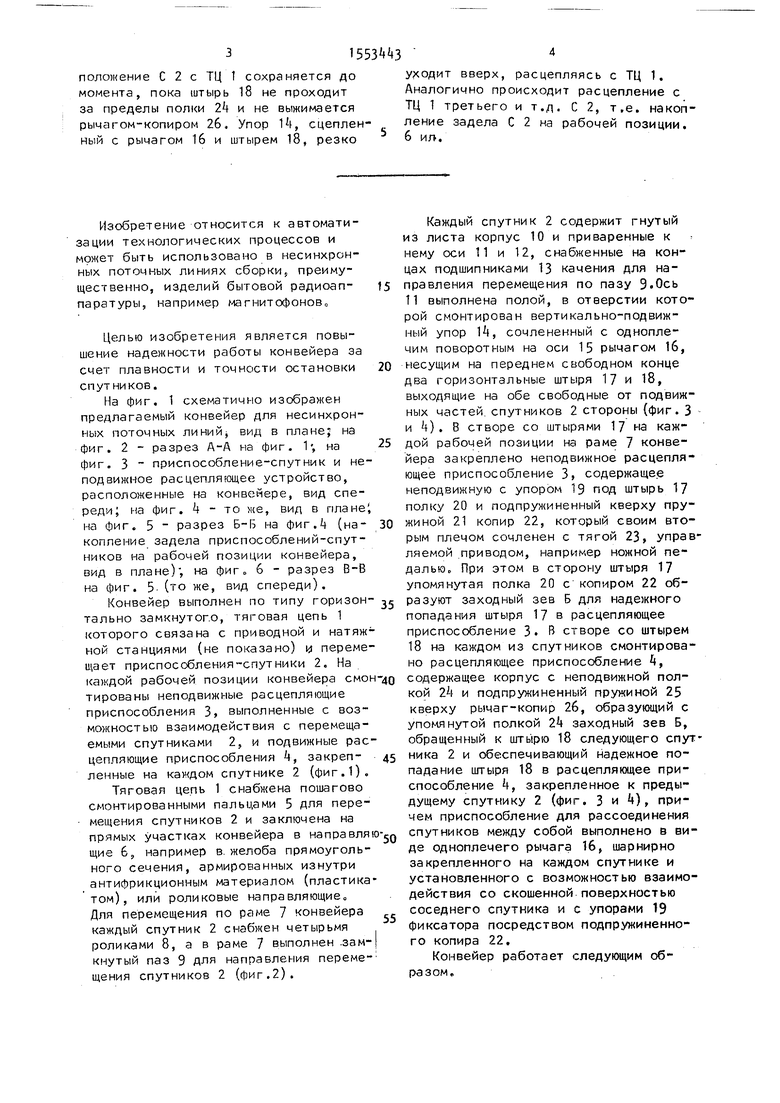
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1984 |
|
SU1263587A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ НЕСИНХРОННЫХ АВТОМАТИЧЕСКИХ ЛИНИЙ | 1993 |
|
RU2083349C1 |
| Цепной тележечный конвейер | 1977 |
|
SU745812A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Установка для заливки форм на конвейере | 1990 |
|
SU1785801A1 |
| Конвейерное устройство | 1982 |
|
SU1044560A1 |
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| Цепной конвейер | 1975 |
|
SU655609A1 |
| Тележечный конвейер | 1985 |
|
SU1316934A1 |
| Автоматическая линия преимущественно для сборки и клепки дисков сцепления | 1981 |
|
SU977135A1 |
Изобретение относится к автоматизации технологических процессов и может быть использовано в несинхронных поточных линиях сборки, преимущественно, изделий бытовой радиоаппаратуры. Цель изобретения - повышение надежности работы конвейера за счет плавности и точности остановки спутников. Конвейер для несинхронных поточных линий включает раму 7, на которой закреплена тяговая цепь (ТЦ) 1 с укрепленными на ней спутниками (С) 2. Для перемещения по раме 7 каждый С 2 имеет ролики 8, а в раме 7 выполнен замкнутый паз 9 для направления перемещения С 2. Каждый из С 2 при подходе к рабочей позиции, т.е. к неподвижному приспособлению 3 для рассоединения С 2, штырем 17 попадает в зев Б, образованный полкой 20 и копиром (К) 22, подпружиненным к полке 20 пружиной 21. Прижимаясь к нижней плоскости полки 20, он отжимает К 22 вниз. Сцепление С 2 с ТЦ 1 встречает упор 19 в полке 20 и западает в него под воздействием К 22. Сочлененный с рычагом 16 упор 14 резко уходит вверх, расцепляясь с пальцем 5 ТЦ 1. При этом С 2 оказывается расцепленным с ТЦ 1 и зафиксированным на раме 7. Второй С 2, следующий за первым, взаимодействует с приспособлением 4 для расцепления, а именно штырем 18 рычага 16 попадает в заходный зев, образованный полкой 24 и подпружиненный пружиной 25 кверху рычагом-копиром 26. Сцепленное положение С 2 с ТЦ 1 сохраняется до момента, пока штырь 18 не проходит за пределы полки 24 и не вычисляется рычагом-копиром 26. Упор 14, сцепленный с рычагом 16 и штырем 18 резко уходит вверх, расцепляясь с ТЦ 1. Аналогично происходит расцепление с ТЦ 1 третьего и т.д. С 2, т.е. накопление задела С 2 на рабочей позиции. 6 ил.
Изобретение относится к автоматизации технологических процессов и может быть использовано в несинхронных поточных линиях сборки, преимущественно, изделий бытовой радиоаппаратуры, например магнитофонов
Целью изобретения является повыение надежности работы конвейера за чет плавности и точности остановки 20 путников.
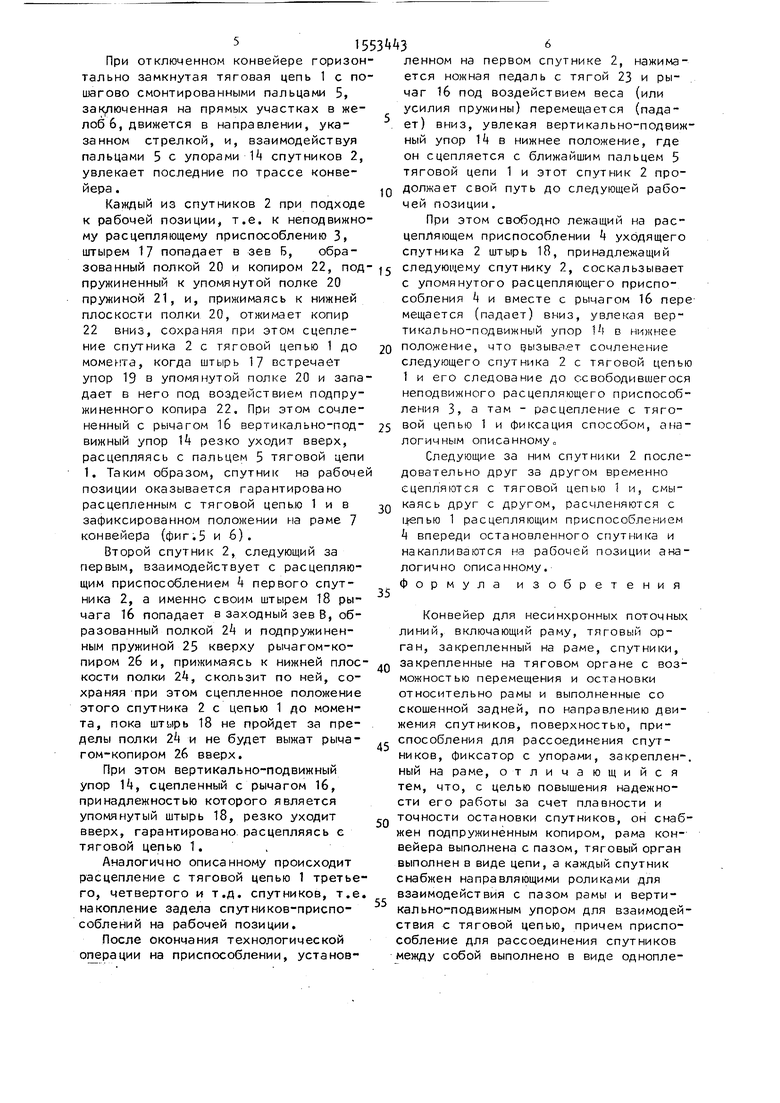
На фиг. 1 схематично изображен редлагаемый конвейер для несинхронных поточных линий, вид в плане; на иг. 2 - разрез А-А на фиг. 1 , на25
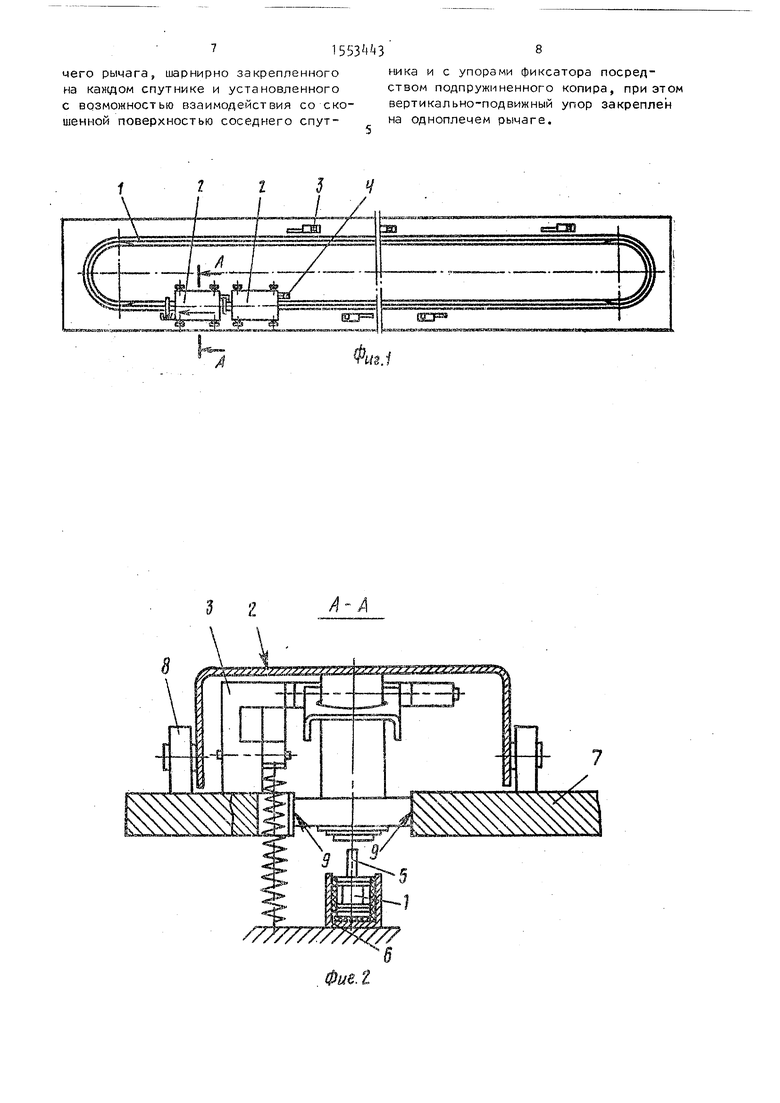
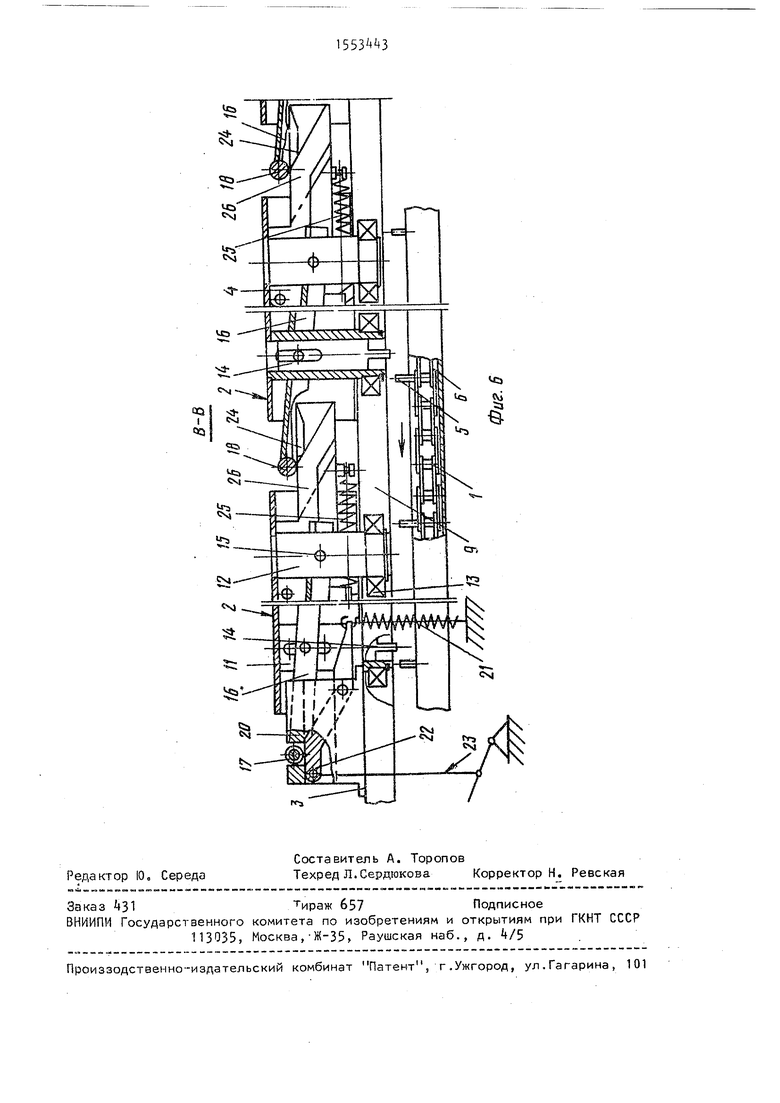
иг. 3 - приспособление-спутник и неподвижное расцепляющее устройство, расположенные на конвейере, вид спереди; на фиг. k - то же, вид в плане , на фиг. 5 разрез Б-Б на фигД (на- 30 коппение задела приспособлений-спутников на рабочей позиции конвейера, вид в плане); на фиг 6 - разрез В-В на фиг. 5-(то же, вид спереди).
Конвейер выполнен по типу горизон- тально замкнутого, тяговая цепь 1 которого связана с приводной и натяжной станциями (не показано) и перемещает приспособления-спутники 2. На каждой рабочей позиции конвейера смон-до тированы неподвижные расцепляющие приспособления 3, выполненные с возможностью взаимодействия с перемещаемыми спутниками 2, и подвижные расцепляющие приспособления k, закреп- 45 ленные на каждом спутнике 2 (фиг.1). Тяговал цепь 1 снабжена пошагово смонтированными пальцами 5 для пере- мещения спутников 2 и заключена на прямых участках конвейера в направляю- щие 6, например в желоба прямоугольного сечения, армированных изнутри антифрикционным материалом (пластикатом), или роликовые направляющие0 Для перемещения по раме 7 конвейера . каждый спутник 2 снабжен четырьмя роликами 8, а в раме 7 выполнен .замкнутый паз 9 для направления перемещения спутников 2 (фиг.2).
5
0
5
0
о 5 .
Каждый спутник 2 содержит гнутый из листа корпус 10 и приваренные к нему оси 11 и 12, снабженные на концах подшипниками 13 качения для направления перемещения по пазу 9.Ось 11 выполнена полой, в отверстии которой смонтирован вертикально-подвижный упор И, сочлененный с одноплечим поворотным на оси 15 рычагом 16, несущим на переднем свободном конце два горизонтальные штыря 17 и 18, выходящие на обе свободные от подвижных частей спутников 2 стороны (фиг.3 и k). В створе со штырями 17 на каждой рабочей позиции на раме 7 конвейера закреплено неподвижное расцепляющее приспособление 3, содержащее неподвижную с упором 19 под штырь 17 полку 20 и подпружиненный кверху пружиной 21 копир 22, который своим вторым плечом сочленен с тягой 23, управляемой приводом, например ножной педалью При этом в сторону штыря 17 упомянутая полка 20 с копиром 22 образуют заходный зев Б для надежного попадания штыря 17 в расцепляющее приспособление 3. В створе со штырем 18 на каждом из спутников смонтировано расцепляющее приспособление А, содержащее корпус с неподвижной полкой 2k и подпружиненный пружиной 25 кверху рычаг-копир 26, образующий с упомянутой полкой 2k заходный зев Б, обращенный к штырю 18 следующего спутника 2 и обеспечивающий надежное попадание штыря 18 в расцепляющее приспособление k, закрепленное к предыдущему спутнику 2 (фиг. 3 и k), причем приспособление для рассоединения спутников между собой выполнено в виде одноплечего рычага 16, шарнирно закрепленного на каждом спутнике и установленного с возможностью взаимодействия со скошенной поверхностью соседнего спутника и с упорами 19 фиксатора посредством подпружиненного копира 22.
Конвейер работает следующим образом.
При отключенном конвейере горизонтально замкнутая тяговая цепь 1 с пошагово смонтированными пальцами 5, заключенная на прямых участках в желоб 6, движется в направлении, указанном стрелкой, и, взаимодействуя пальцами 5 с упорами 14 спутников 2, увлекает последние по трассе конвейера .
Каждый из спутников 2 при подходе к рабочей позиции, т.е. к неподвижному расцепляющему приспособлению 3 штырем 17 попадает в зев Б, образованный полкой 20 и копиром 22, под- следующему спутнику 2, соскальзывает
пружиненный к упомянутой полке 20 пружиной 21, и, прижимаясь к нижней плоскости полки 20, отжимает копир 22 вниз, сохраняя при этом сцепление спутника 2 с тяговой цепью 1 до момента, когда штырь 17 встречает упор 19 в упомянутой полке 20 и западает в него под воздействием подпружиненного копира 22. При этом сочлененный с рычагом 16 вертикально-подвижный упор 14 резко уходит вверх, расцепляясь с пальцем 5 тяговой цепи 1. Таким образом, спутник на рабочей позиции оказывается гарантировано расцепленным с тяговой цепью 1 и в зафиксированном положении на раме 7 конвейера (фиг.5 и 6).
Второй спутник 2, следующий за первым, взаимодействует с расцепляющим приспособлением 4 первого спутника 2, а именно своим штырем 18 рычага 16 попадает в заходный зев В, образованный полкой 24 и подпружиненным пружиной 25 кверху рычагом-копиром 26 и, прижимаясь к нижней плоскости полки 24, скользит по ней, сохраняя при этом сцепленное положение этого спутника 2 с цепью 1 до момента, пока штырь 18 не пройдет за пределы полки 24 и не будет выжат рычагом-копиром 26 вверх.
При этом вертикально-подвижный упор 14, сцепленный с рычагом 16, принадлежностью которого является упомянутый штырь 18, резко уходит вверх, гарантировано расцепляясь с тяговой цепью 1.
Аналогично описанному происходит расцепление с тяговой цепью 1 третьего, четвертого и т.д. спутников, т.е. накопление задела спутников-приспособлений на рабочей позиции.
После окончания технологической операции на приспособлении, установ20
25
30
35
40
45
50
55
с упомянутого расцепляющего приспособления 4 и вместе с рычагом 16 пере мещается (падает) вниз, увлекая вер тикзльно-подвижный упор 14 в нижнее положение, что вызывает сочленение следующего спутника 2 с тяговой цепью 1 и его следование до освободившегося неподвижного расцепляющего приспособления 3, а там - расцепление с тяговой цепью 1 и фиксация способом, аналогичным описанному о
Следующие за ним спутники 2 последовательно друг за другом временно сцепляются с тяговой цепью 1 и, смыкаясь друг с другом, расчленяются с цепью 1 расцепляющим приспособлением 4 впереди остановленного спутника и накапливаются на рабочей позиции аналогично описанному. Формула изобретения
Конвейер для несинхронных поточных линий, включающий раму, тяговый орган, закрепленный на раме, спутники, закрепленные на тяговом органе с возможностью перемещения и остановки относительно рамы и выполненные со скошенной задней, по направлению движения спутников, поверхностью, приспособления для рассоединения спутников, фиксатор с упорами, закрепленный на раме, отличающийся тем, что, с целью повышения надежности его работы за счет плавности и точности остановки спутников, он снабжен подпружиненным копиром, рама конвейера выполнена с пазом, тяговый орган выполнен в виде цепи, а каждый спутник снабжен направляющими роликами для взаимодействия с пазом рамы и вертикально-подвижным упором для взаимодействия с тяговой цепью, причем приспособление для рассоединения спутников между собой выполнено в виде одноплеленном на первом спутнике 2, нажимается ножная педаль с тягой 23 и рычаг 16 под воздействием веса (или усилия пружины) перемещается (падавниз, увлекая вертикально-подвиж
ет)
ный упор 14 в нижнее положение, где он сцепляется с ближайшим пальцем 5 тяговой цепи 1 и этот спутник 2 продолжает свой путь до следующей рабочей позиции.
При этом свободно лежащий на расцепляющем приспособлении 4 уходящего спутника 2 штырь 18, принадлежащий
0
5
0
5
0
5
0
5
с упомянутого расцепляющего приспособления 4 и вместе с рычагом 16 пере мещается (падает) вниз, увлекая вер тикзльно-подвижный упор 14 в нижнее положение, что вызывает сочленение следующего спутника 2 с тяговой цепью 1 и его следование до освободившегося неподвижного расцепляющего приспособления 3, а там - расцепление с тяговой цепью 1 и фиксация способом, аналогичным описанному о
Следующие за ним спутники 2 последовательно друг за другом временно сцепляются с тяговой цепью 1 и, смыкаясь друг с другом, расчленяются с цепью 1 расцепляющим приспособлением 4 впереди остановленного спутника и накапливаются на рабочей позиции аналогично описанному. Формула изобретения
Конвейер для несинхронных поточных линий, включающий раму, тяговый орган, закрепленный на раме, спутники, закрепленные на тяговом органе с возможностью перемещения и остановки относительно рамы и выполненные со скошенной задней, по направлению движения спутников, поверхностью, приспособления для рассоединения спутников, фиксатор с упорами, закреплен, ный на раме, отличающийся тем, что, с целью повышения надежности его работы за счет плавности и точности остановки спутников, он снабжен подпружиненным копиром, рама конвейера выполнена с пазом, тяговый орган выполнен в виде цепи, а каждый спутник снабжен направляющими роликами для взаимодействия с пазом рамы и вертикально-подвижным упором для взаимодействия с тяговой цепью, причем приспособление для рассоединения спутников между собой выполнено в виде однопле71553 38
чего рычага, шарнирно закрепленногопика и с упорами фиксатора посредна каждом спутнике и установленногоством подпружиненного копира, при этом
с возможностью взаимодействия со ско- вертикально-подвижный упор закреплен шенной поверхностью соседнего спут-на одноплечем рычаге.
з г
л л л
-е- .еЧл
V&
ЖЛЕ&
4S
| Конвейер | 1980 |
|
SU962124A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
