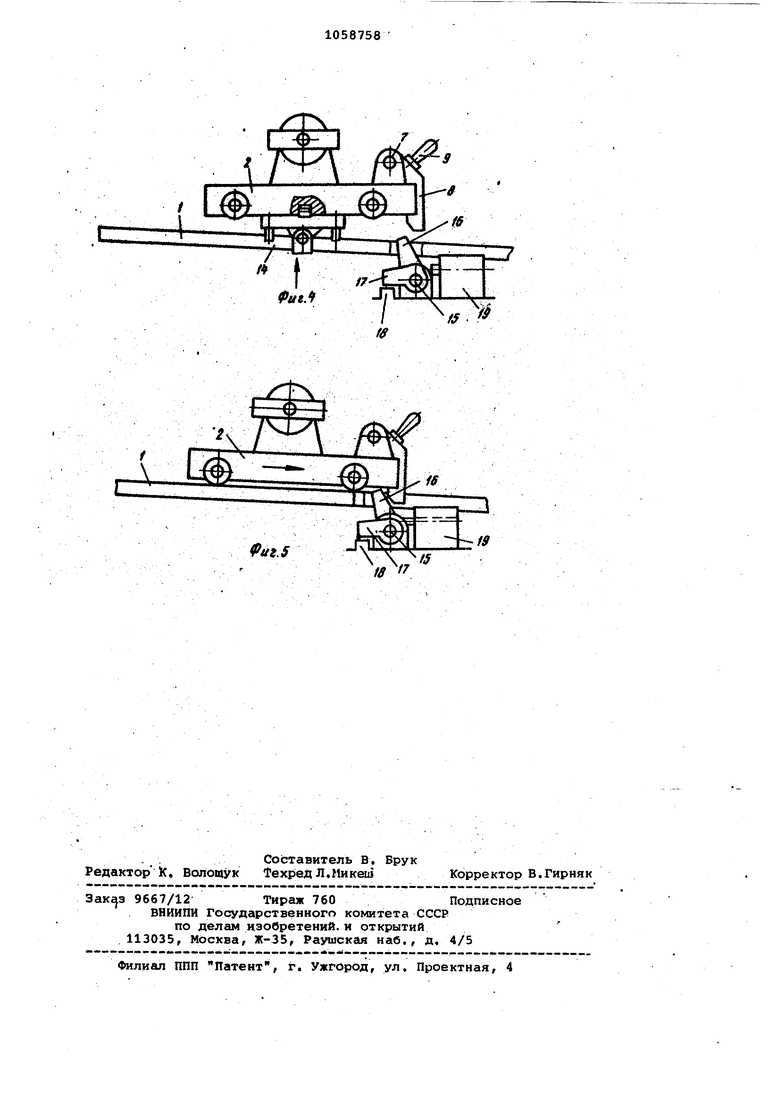
Изобретение относится к станкостроению и может найти применение при сборке изделий различных номенклатур. Извеатна несинхронная автоматическая ЛИНИЯ, в которой установлено в заданной последовательности техно логическое оборудование, связанное между собой транспортным устройстгвом, содержащим приспособления-спут ники с упорами, а на рабочих позициях установлены блоки кулачков, расположенные с возможностью поворо та при. взаимодействии с соответствукмдимн упорами приспособлений-спут ников 1 , Известная линия имеет ненадежную систему управления и не обеспечивает возможность включения автономной работы технологического оборудовани Цель изобретения - повышение надежности и возможности работы оборудования по индивидуальной програм ме. Указанная цель достигается тем, что несинхронная автоматическая линия, в которой установлено в заданн последовательности технологическое оборудование, связанное между собой .транспортным устройством, содержапщ приспособления-спутники с упорами, а на рабочих позициях установлены блоки кулаков, расположенные с возможностью поворота при взаимодействии с соответствукя1№1ми упорами приспособлений спутников, снабжена установленным на рабочей позиции меха низмом подъема приспособлений-спутников на высоту зоны контакта соответствующего кулачка с упором присп собления-спутника. кулачок снабжен шарнирно установленным относительно него фпаяском, расположен ным с возможностью взаимодействия с дополнительно введенным в устройство выключателем индивидуальнойпрограммы оборудования. На фиг, 1 изображена рабочая позиция с приспособлением-спутником, вид спереди, на фиг. 2 - то же, вид в плане; на фиг. 3 - положение приспособления-спутника на рабочей позиции при встрече с кулачком, на фиг. 4 - положение приспособления-спутника при выполнении техноло гической операции и на рабочей пози ции , на фиг. 5 - положение приспособления-спутника на рабочей позиции при окончании цикла. Несинхроннад автоматическая линия содержит транспортное устройство, выполненное в виде наклонного транспортцого пути 1, на котором установлены с возможностью перемещения под действием сил гравитации приспо собленйя-спутники 2, имеющие опоры качения 3. Вдоль транспортных путей 1 в тех 1ологической последовательности установлено технологическое оборудование для выполнения конкрет-, ных технологических операций. Корпус 4 спутника имеет планшайбу 5, на которой установлено собираемое изделие 6. В передней части корпуса 4 перпендикулярно к направлению движения спутника расположена ось 7, на которой с возможностью поворота и перемещения устаноблен упор 8 с рукояткой 9 для: его фиксации. В передней торцевой части корпуса 4 выполнены опорные гнезда 10. В корпусе 4 имеются отверстиями для базирования спутника 2 на технологическом оборудовании при выполнении технологической опергщии. Рабочие позиции технологического обррудовакия имеют .механизм подъема спутника 2, состоя-щий из силового цилиндра 12, рычагов 13 и плиты 14 с фиксирукмими пальцапш,. взаимодействующими с отверстиями 11 в корпусе спутника. На рабочей- позиции установлен блок .кулг1чков, состоящий из оси 15, -смонтированной перпендикулярно направлению транспортных путей 1, и кулачков 16, расположенных по ней в соответствии с модификациями изделий, которые обрабатываются на данном т хкологическом оборудовании. На конце оси закреплен противовес 17|, опиракадийся в исходном положении на упор 18, при этом кулачки 16 располагаются с наклоном в ту сторону, откуда на автоматическую станцию поступает спутник. В поднятом положении противовес 17 опирается на подпружиненный упор 19. На оси 15 закреплен флажок 20, который взаимодействует с конечным выключателем 21, управляетцим работой силового цилиндра 12 механизма подъема спутника. Для возможности сборки другого изделия на кулачке 16 с возможностью поворота относительно него установлен дополнительный флажок 22, взаимодействующий во включенном положении с дополнительным конечным выключателем 23 индивидуальной программы работы технологического оборудования. Автоматическая линия работает . следующим образом. 1 .Изделие 6 располагается на планшайбе 5 спутника 2. Упор 8 перемещается по оси 7 н фиксируется в опор ном гнезде 10, соответствукщем модификации собираемого изделия. При движении под действием сил гравитации спутника 2 с изделием 6 по транс портным путям 1 на рабочей позиции происходит встреча упора 8 с кулачком 16, соответствующим данной модификации изделия. Рабочие позиции, на которых при указанном положении упора 8 не установлены кулачки 16, спутник 2 минует. образом.
приспособление-спутник самоопределяет рабочие позиции станции, соответ-г ствующие технологическому маршруту того изделия, на сборку которого он настроен. При. встрече упора 8 с кулачком 16 последний поворачивается вместе с осью 15 и противовесом 17 до встречи с упором 19, который аыартизирует и останавливает приспособление-спутник 2. При этом флажок 20, воздействуя на конечный выключатель 21, дает команду силовому цилиндру 12 на подъем спутника. Одновременно флажок 22 с помсхцью конечного выключателя 23 включает индивидуальную прогргшму.работы исполнительных механизмов на данной рабочей позиции, . соотве ствукадую модификации собираемого изделия. Силовой цилиндор 12 через рычаги 13 и плиту 14 с фиксаторами, базирующими спутник по отверстиям 11, поднимает спутник в рабочее положение фиг. 4). При этом высо- . та подъема должна быть достаточной для схода упора 8 спутника 2с кулачкаки 16, В поднятом положении спутника 2 изделие 6 обрабатывается на автоматической станции по соответствующей программе, определенной конечными выключ ателягли 21 и 23. Как только упор Исойдет с кулачка 16, последний вместе со всем блоком кулачков расположенных на оси 15, под действием противовеса 17 поворачивается в исходное положение до контакта противовеса 17 с упором 18. Таким образом, блок кулачков подготовлен к считыванию прохтэаммы слеoдующего спутника. После окончания выполнения технологической операции на рабочей позиции механизм подъема спускает спутник 2 с изде. лием 6 на транспортные пути 1. При 5 этом упор 8 оказывается уже за кулачком 16 и ничто не препятствует движению спутника 2, который под действием сил гравитации перемещается к следующей автоматической станции.
Предложенное выполнение несинхронной автоматической линии имеет простую и надежную систему улфав. ления, обеспечивающую включение 5 автономной работы технологического оборудования.
/
ffJtff.if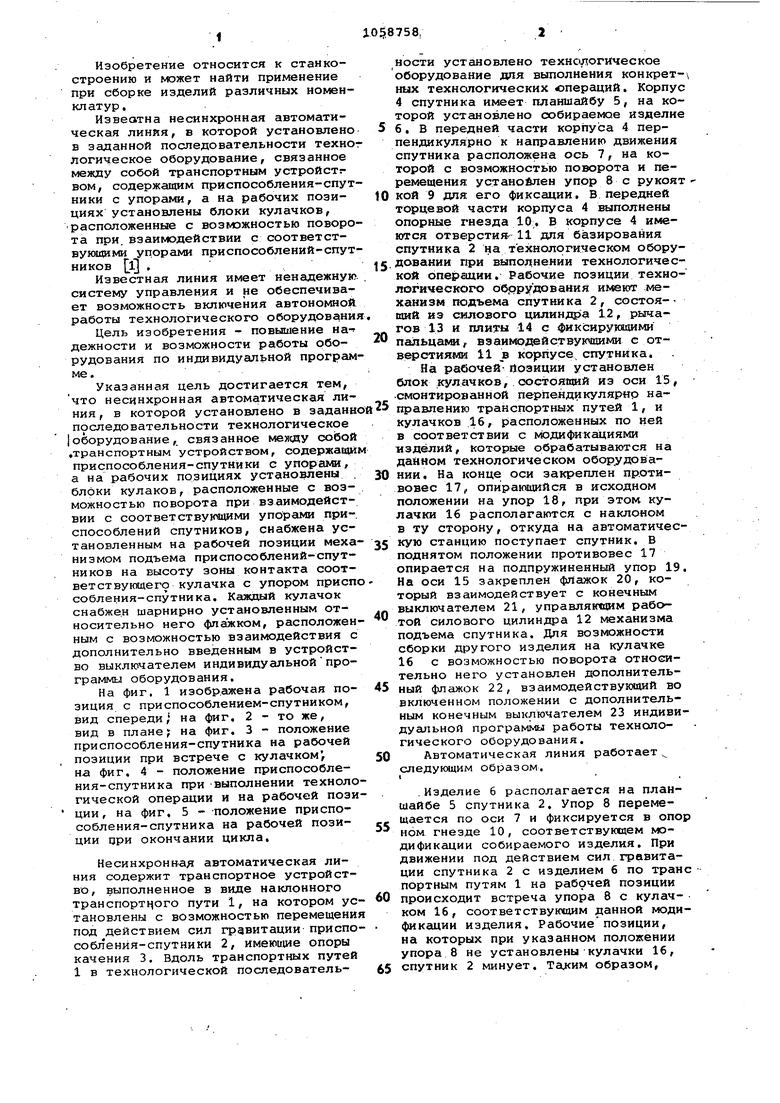

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство подъема и ориентации приспособлений-спутников для несинхронных автоматических линий | 1987 |
|
SU1491664A1 |
| Автоматическая сборочная линия | 1987 |
|
SU1590339A1 |
| Транспортная система для несинхронных автоматических линий | 1982 |
|
SU1060420A1 |
| Гибкая сборочная линия | 1986 |
|
SU1447641A1 |
| Транспортная система автоматизированного производственного комплекса | 1986 |
|
SU1421493A1 |
| Конвейер для несинхронных поточных линий | 1987 |
|
SU1553443A1 |
| Механизм автоматической сварки пистона с траверзой анода к полуавтоматической линии сборки пакетов радиоламп | 1975 |
|
SU606176A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ НЕСИНХРОННЫХ АВТОМАТИЧЕСКИХ ЛИНИЙ | 1993 |
|
RU2083349C1 |
| Распределительное устройство | 1986 |
|
SU1364578A1 |
| Устройство для фиксации грузоносителей | 1984 |
|
SU1270073A1 |
НЕСИНХРОННАЯ АВТОМАТИЧЕСКАЯ ЛИНИЯ, в которой установлено в заданной последовательности техноло.гическое оборудование,, связанное между собой транспортным устройством, ;содержащим приспособления-спутники с упоракш, а на рабочих позициях установлены блоки кулачков, располо;женные с возможностьюповорота при взаимодействии с соответствунтдими упорами приспособлений-спутников, отличающаяся тем, что, с целью увеличения надежности и возможности работы оборудования по индивидуальной программе, она снабжена установленным на рабочей позиции механизмом подъема приспособлений-спутников на высоту зоны контакта соответствукхдего кулачка с упором приспособления-спутника, а каждый кулачок снабжен шарнирно установленным относительно него флажком, расположенным с возмож с ностью взaи юдeйcтвия с дополнитель но введенным в устройство выключа(Л телем индивидуальной программы оборудования .
иг.З
tS 15
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Горный компас | 0 |
|
SU81A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| : | |||
