S i2
u.1
«l
|00 00
k)
11
Изобретение относится к машиностроению s в частности к устройствам для транспортирования приспособле- ний-спутников с установленными на них заготовками и обрабатываемыми деталями в автоматической линии к зонам обработки и складирования с последующей их установкой в накопительные позиции при позиции обработки.
Цель изобретения упрощение кон- : струкции за счет сокращения количества приводов.
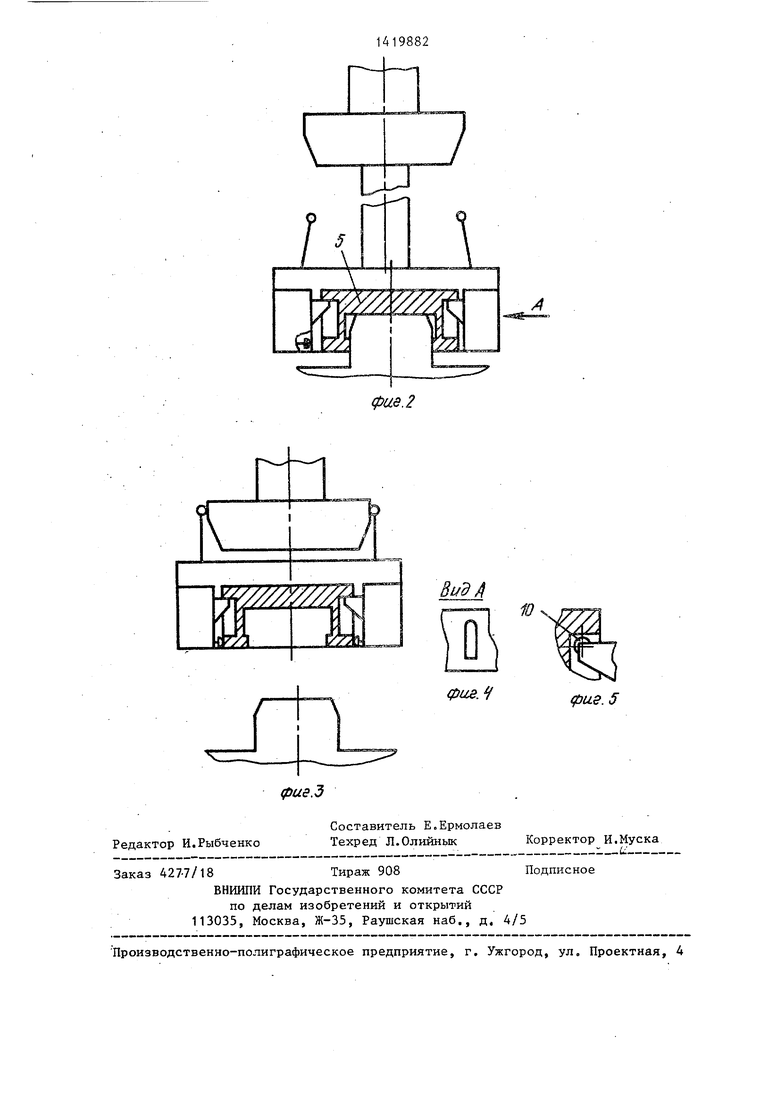
i На фиг. 1 представлена кинемати- |Ческая схема манипулятора; на фиг. 2 i положение элементов конструкции при захвате спутника на фиг 3 - скор- ректированное положение спутника по отношению к манипулятору; на фиг, 4 - вид А на фиг. 2 (схват условно не : показан); на фиг, 5 - вариант выполнения транспортного робота, : Манипулятор содержит механическую I руку 1, приводы ее перемещений (не I показаны)5 схват 2, В П-образном корпусе 3 схвата 2 размещен механизм захвата, имеющий захватные элементы в виде упоров k 5 управляемых от привода (не показан)j и механизм коррекции транспортируемого спутника 5, состоящий из двух двуплечих рычагов ; 6, установленных с возможностью ново ; р ота в корпусе 3, Рычаги 6 могут взаимодействова.ть одним своим плечом 7 со спутником 5 s а другим плечом 8 - с клином 9, жестко установленным на руке 1. Расстояние между внутрен- : ними боковыми поверхностями П-образ ; ного корпуса 3 схвата 2 больше разме ра приспособления-спутника на удвоенную величину погрешности при позиционировании для свободного входа схвата 2 при любом возможном отклонении. Для контакта механизма закрепления с приспособлением-спутником 5 на осях выдвижных упоров 4 установлены ролики 10.
Плечи 8 рычагов 6 сжаты пружиной 11 до соприкосновения с клином 9 1-1ЛИ упорами 12 в положении захвата спутника 5.
Манипулятор работает следующим- образом
В исходном положении (схват пустой) вьщБИЖные упоры 4 механизма закрепления находятся в корпусе 3
0
98822
схвата 2. Плечи 7 рычагов 6 находятся в корпусе 3. схвата 2, а плечи 8 сжаты пружиной 11 до упоров 12,-Для захвата схват 2 опускается на приспособление-спутник 5, вьщвижные упоры 4 разворачиваются с помощью привода и выдвигаются из корпуса 3 схвата 2 в специальные пазы (фиг, 2) в спутнике 5. Ось схвата 2 не совпадает с осью приспособления-спутника 5, При подъеме схвата 2 с приспособлением-спутником 5 в позицию транспортировки после снятия приспособления-спутника 5 с посадочного места плечи 8 двуплечих рычагов 6 начинают скользить по боковой поверхности клина 9, растягивая пружину 11, а плечи 7 рычагов б начинают сближаться до соприкосновения со спутником 5; осуществляя коррекцию его положения (фиг. 3).
Выполнение вьщвижных упоров 4 с роликами 10 облегчает операцию коррекции положения спутника 5 относительно схвата 2.
5
0
5
0
5
0
5
5
Формула изобретения
Ма.нипулятор для транспортировки спутников, содержащий механическую руку, на которой установлен схват с Аеханизмом для захвата спутников, включающим в себя захватные элементы с приводом, и с механизмом коррекции положения спутника в схвате, отличающийся тем, что, с целью упрощения конструкции за счет сокращения количества приводов, корпус схвата установлен на механической руке с возможностью ограниченного вертикального перемещения, а механическая рука снабжена закрепленным на ней клином, при этом механизм коррекции вьшолнен в виде расположенных в корпусе схвата оппозитно подпружиненных двуплечих рычагов, одни плечи которых размещены с возможностью контактирования с клином, а другие предназначены для взаимодействия со спутниками, при этом оси двуплечих рычагов расположены в горизонтальной плоскости, параллельны друг другу и перпендикулярны направ- i лению перемещения захватных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1986 |
|
SU1315303A1 |
| Схват | 1981 |
|
SU975391A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Манипулятор | 1990 |
|
SU1743851A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Транспортное устройство автоматической линии спутникового типа | 1986 |
|
SU1447640A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Групповой схват | 1986 |
|
SU1333576A1 |
Изобретение относится к станкостроению и может быть использовано в манипуляторах для автоматических спутниковых линий. Цель изобретения - упрощение конструкции за счет сокращения количества приводов. Для этого устройство содержит руку 1, приводы линейных перемещений, схват 2, в корпусе которого установлены механизм захвата с захватными элементами в виде вьщвижных упоров 4 и механизм коррекции транспортируемого спутника. Корпус 3 схвата 2 выполнен П-образ- ным, механизм коррекции состоит из двух двуплечих рычагов 6, установленных поворотно в корпусе 3. Рычаги 6 взаимодействуют одним своим плечом 7 со спутником, а другим - с клином 9, жестко установленным на руке 1, Расстояние между внутренними боковыми сторонами П-образного корпуса 3 выбрано больше размера спутника на удвоенную величину погрешностей при позиционировании для свободного входа схвата 2 на спутник. 5 ил. 1
СП
Wy7////A
фие.З
Редактор И.Рыбченко
Составитель Е.Ермолаев Техред Л.Олийньк
фае. 2
BLfdA
фОё.
(fJUS.S
Корректор И.Муска
| Кисть промышленного робота | 1982 |
|
SU1168090A3 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
