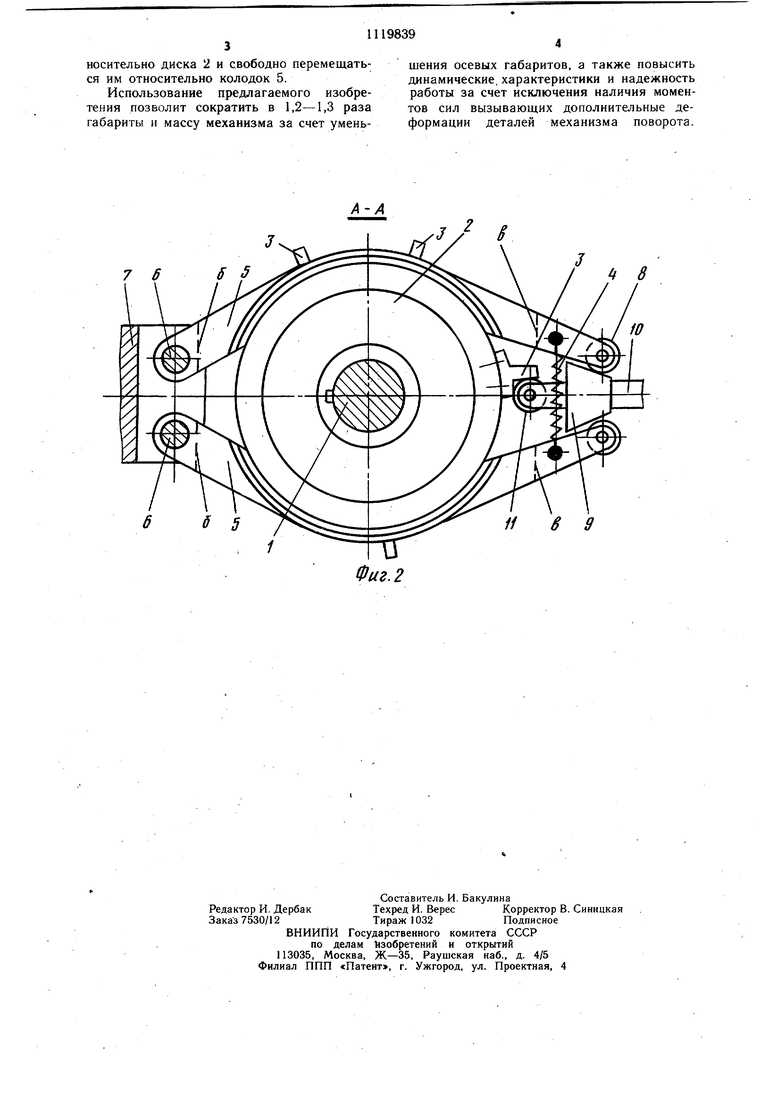
Изобрете1{ие относится к механизации и автоматизации производственных процессов в машиностроении. Известен механизм поворота руки промышленного робота, используемого для выполнения загрузочно-разгрузочных, транспортных, сборочных и др. работ. Этот механизм содержит корпус, поворотную колонну, на которой жестко закреплен тормозной диск, привод поворота колонны и механизм позиционирования, выполненный в виде двух подпружиненных одна относительно другой тормозных колодок, шарнирно соединенных с корпусом, выдвижной и регулируемые упоры, при этом последние расположены на тормозном диске 1. Недостатком известного устройства является расположение тормозных колодок внутри тормозного барабана, что требует консольного закрепления колодок и применения ряда промежуточных звеньев для передачи движения и усилия от привода на тормозные колодки, что значительно усложняет конструкцию механизма поворота увеличивая ее габариты и массу. При этом тормозные колодки, промежуточные звенья и привод расположены и движутся в различных плоскостях, передавая усилия, что ведет к появлению дополнительных .моментов сил, действующих на все элементы отрицательно, влияющих на надежность и долговечность работы механизма, требуя увеличения жесткости конструкции, а следовательно, увеличения ее габаритов и массы. Выполнение регулируемых упоров со сложным криволинейным скосом (таких упоров в приводе должно быть несколько) так же ведет к усложнению конструкции и увеличению трудоемкости ее изготовления и настройки на необходимый цикл движения. Цель изобретения - уменьшение габаритов и улучшение динамических характеристик, а также повышение надежности работы механизма поворота промышленного робота. Поставленная цель достигается тем, что в механизме поворота промышленного робота, содержащем корпус, поворотную колон ну, на которой жестко закреплен тормозной диск, привод поворота колонны и механизм позиционирования, выполненный в виде двух подпружиненных одна относительно другой тормозных колодок, шарнирно соединенных с корпусом, выдвижной и регулируемые упоры,- при этом последние расположены на тормозном диске, выдвижной упор выполнен в виде штока с конусной поверхностью в его средней части и с роликом на одном конце, причем ролик расположен с возможностью взаимодейстия с регулируемым упором, а конусная поверхность штанги - с тормозными колодками посредством установленных на их концах дополнительных роликов, при этом на цилиндрической поверхности тормозного диска выполнен кольцевой паз, а на тормозных колодках - проточки под регулируемые упоры. На фиг. 1 изображен механизм, осевой разрез общего вида; на фиг. 2 - разрез А-А на фиг. 1. Механизм поворота промышленного робота включает поворотную колонну 1, получающую вращение от отдельного привода (не показан), на которой жестко закреплен тормозной диск 2, имеющий на цилиндрической поверхности кольцевой паз а, разделяющий эту поверхность на две цилиндрические части. К пазу а крепятся в требуемом угловом положении регулируемые упоры 3. К цилиндрическим поверхностям 2 прижимаются с помощью пружин 4 тормозные колодкн 5, которые свободно располагаются на осях 6, закрепленных в корпусе 7. Колодки 5 на участках от линии б до линии в имеют проточки, которые по высоте (в направлении вертикальной оси на фиг. 1) больще толщины упоров 3 в этом же направлении. На правых концах колодок 5 расположены дополнительные ролики 8, которые контактируют (взаимодействуют) со скосом упора 9, расположенного на штоке 10 (привод перемещения упора и штока не показан). Шток 10 заканчивается роликом 11. Механизм поворота работает следующим образом. При повороте колонны 1 по часовой стрелке и при поступлении сигнала о начале торгюжения (этот сигнал, например, может возникать вследствие воздействия движущегося упора на конечный выключатель) срабатывает привод выдвижения щтока 10, который перемещает упор 9 и ролик 11 влево. При этом дополнительные ролики 8, скатываясь по скосу упора 9, позволяют тормозным колодкам 5 приближаться к диску 2 за счет стягивания их пружинами 4. Это ведет к появлению тормозной силы, которая замедляет вращение колонны 1 с диском 2 и при подходе упора 3 к ролику 11 произойдет остановка колонны. После этого начинают работать другие приводы робота. После завершения их работы колонна 1 может вращаться как в одну, так и в другую сторону. Для этого необходимо осуществить растормаживание привода, для чего вначале подается команда на перемещение штока 10 вправо, совместно с которы.м перемещается упор 9, разводя своими скосами колодки 5, а ролик I1 при этом выходит из контакта с упором 3. Затем подается команда на поворот колонны 1 с аналогичным процессом торможения н остановки. Наличие проточек в тормозных колодках на участках от линий бив позволяет расставить упоры 3 в любом положении относительно диска 2 и свободно перемещаться им относительно колодок 5.
Использование предлагаемого изобретения позволит сократить в 1,2-1,3 раза габариты и массу механизма за счет уменьшения осевых габаритов, а также повысить динамические, характеристики и надежность работы за счет исключения наличия моментов сил вызывающих дополнительные деформации деталей механизма поворота.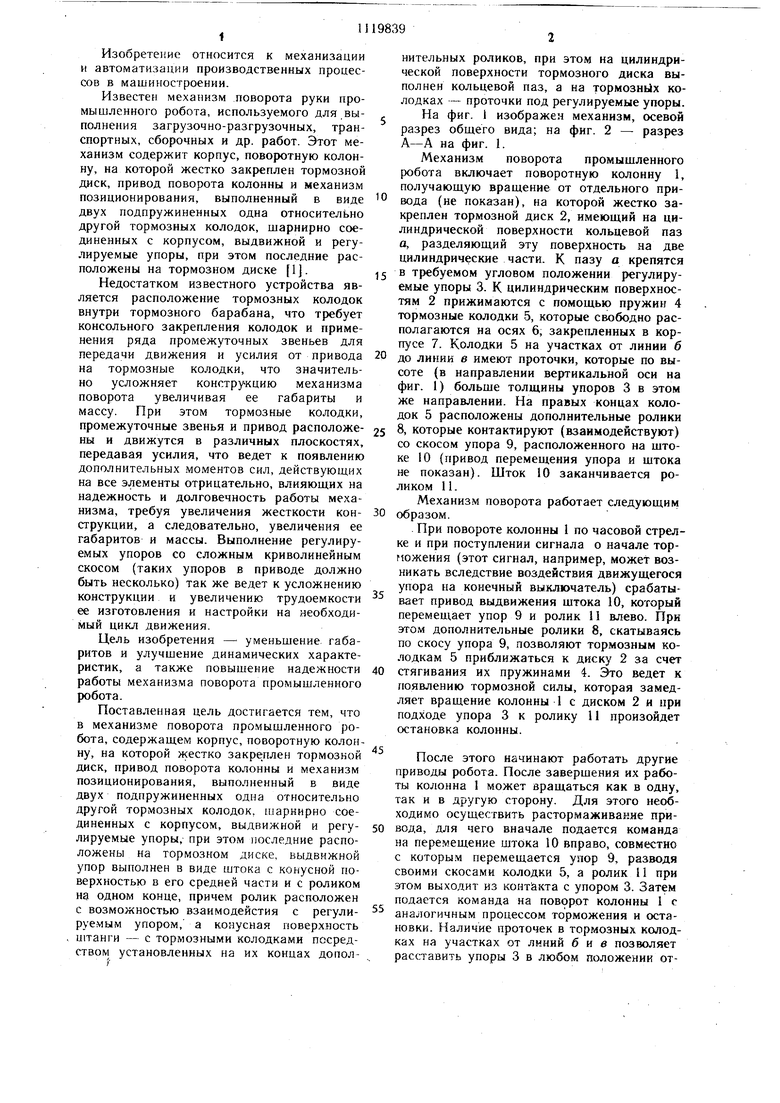
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота руки промышленного робота | 1982 |
|
SU1060464A1 |
| СПОСОБ ГЛУБОКОЙ СВЕРЛЯЩЕЙ ПЕРФОРАЦИИ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2298644C1 |
| Устройство для сборки и дуговой сварки металлоконструкций | 1981 |
|
SU965687A2 |
| Промышленный робот | 1988 |
|
SU1542793A1 |
| Дисковый тормоз | 1987 |
|
SU1626013A1 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| КЛЮЧ ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВЫХ СОЕДИНЕНИЙ СКВАЖИННЫХ ТРУБ | 2003 |
|
RU2268983C2 |
| Станок для снятия валяной обуви с механических колодок | 1956 |
|
SU105035A1 |
| Установка для испытания и окончательной обработки тормозных колодок | 1976 |
|
SU691325A1 |
| Сверлильный станок | 1985 |
|
SU1355369A1 |
МЕХАНИЗМ ПОВОРОТА ПРОМЫШЛЕННОГО РОБОТА, содержащий корпус, поворотную колонну, на которой жестко закреплен тормозной диск, привод поворота колонны и механизм, позиционирования, выполненный в виде двух подпружиненных одна относительно другой тормозных колодок, шарнирно соединенных с корпусом, выдвижной и регулируемые упоры, при этом последние расположены на тормозном диске, отличающийся тем, что, с целью уменьшения его габаритов и улучшения динамических характеристик, а также повышения надежности, выдвижной упор выполнен в виде штока с конусной поверхностью в его средней части и с роликом на одном конце, причем ролик расположен с возможностью взаимодействия с регулируемым упором, а конусная поверхность штанги - с тормозными колодками посредством установленных на их концах дополнительных роликов, при этом на цилиндрической поверхности тормозного диска выполнен кольцевой паз, с а на тормозных колодках - проточки под регулируемые упоры. (Л СХ) ее со Фиг. 1
7 6
Фиг. 2 Ц 8 11 6 9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3496432/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
