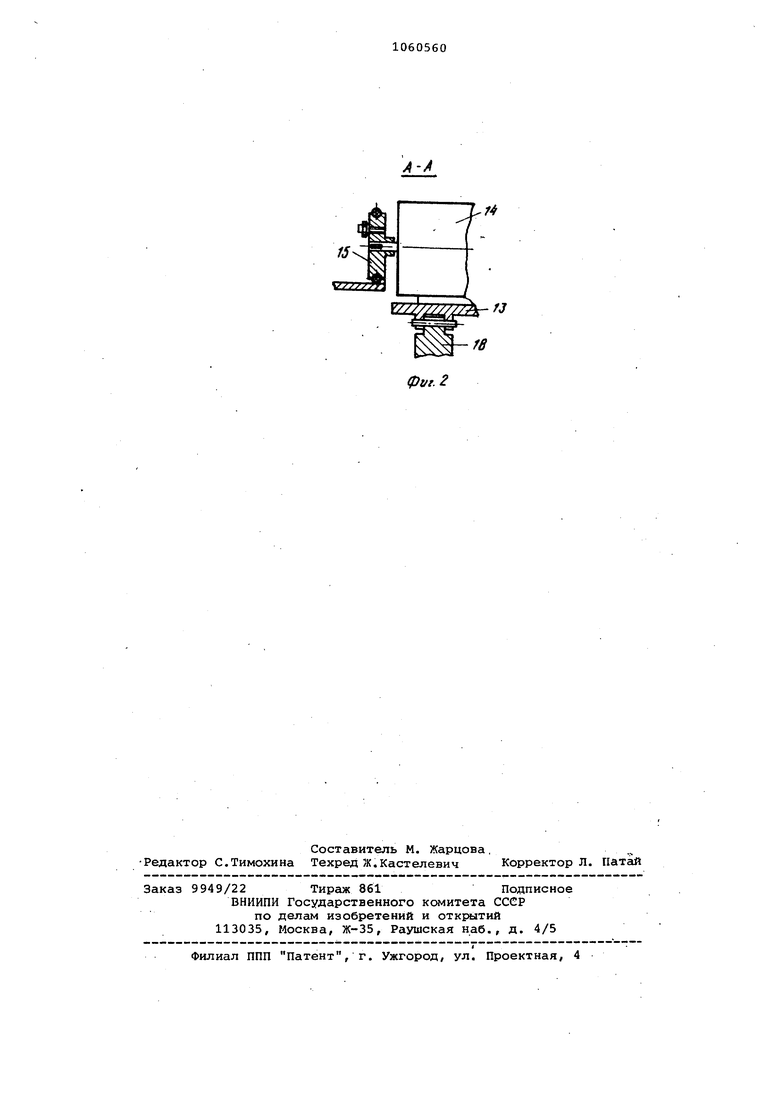
Изобретение относится к подающим механизмам стопы листов на определенный уровень. Известен механизм непрерывного подъема стопы листов на уровень подающих валиков, содержащий стол для заготовок, приводимый в вертикальное возвратно-поступательное движение связанным с ползуном кривошипно-шатунным механизмом, приводимым электродвигателем, установленным на опорной плите, смонтированной с воз ;можностью углового горизонтального перемещения посредством винтовой пары, гайка которой жестко связана храповым механизмом, и связанный с кривошипно-шатунным механизмом рычаг с упором для взаимодействия с верхней заготовкой стопы Cl. Недостатком известного устройства является опускание листа вручную при помощи конической передачи при выводе собачки из зацепления с храповым колесом. Целью изобретения является расширение функциональных возможностей а именно обеспечение автоматизированного отвода стола для заготовок. Для достижения указанной цели устройство для подъема стопы загото вок, преимущественно стопы листов, содержащее стол для заготовок, приводимый в вертикальное возвратнопоступательное движение связанным с ползуном кривошипно-шатунным механизмом, приводимым э пектродвигателе установленным на опорной плите, смо тированной с возможностью углового горизонтального перемещения посредством винтовой пары, гайка которой жестко связана с храповь1м механизмом, и связанный с кривошипно-шатун ным механизмом рычаг с упором для взаимодействия с верхней заготовкой стопы, снабжено второй винтовой парой, цепной передачей для связи винтовых пар и фрикционной передачей, ведущий элемент которой устано лен на валу электродвигателя, а ве домый жестко связан с гайкой второй винтовой пары, при этом србачка храпового механизма закреплена на ползуне, а направляющая ползуна жес ко соединена с опорной плитой.и рычагом. На фиг. 1 схематически изображено предлагаемое устройство, попереч ный разрез;на фиг. 2 - разрез А-А .на фиг. 1. Стопа листов 1 укладывается в направлякадих 2 на столе 3. Стол 3 связан с двумя винтами 4 и 5 винтовых пар, гайки 6 и 7 которых находят ся в подшипниках, закрепленных в не-подвижном основании. Гайка 6 жестко связана с храповым колесом 8. Собач;са 9 закреплена на ползуне 10 кривошипно-шатунного механизма 11. Ползун 10 кривощипно-шатунного механиз1ма находится в направлянвдих 12, которые жестко соединены с подмоторной плитой 13 электродвигателя 14 кривощипно-щатунного механизма 11. На валу электродвигателя закреплено ведущее фрикционное колесо 15 фрикционной пары. Ведомое колесо 16 этой пары жестко связано с гайкой 7. Винты 4 и 5 кинематически связаны цепной передачей 17, звездочки которой жестко соединены соответственно с гайками ,6 и 7. Подмоторная плита 13 шарнирно связана со стойкой 18 1И подпружинена пружиной 19. Упор для подмотррной плиты обозначен позицией 20. Направляквдая 12 ползуна шарнирно связана с рычагом 21, на котором закреплен упор 22, взаимодействующий с верхним листом. Механизм работает следующим образом. При приведении в действие криво - шипно-шатунного механизма 11 собачка 9 вращает храповое колесо 8 и гайку 6. Через цепную передачу 17 вращение передается гайке 7. Винты 4 и 5 поднимают стол 3 с листами в направляющих 2. При этом поднимается упор 22, упирающийся в верхний лист, и рычаг 21. При достижении требуемого уровня собачка 9 выходит из зацепления с храповым колесом 8 при повороте подмоторной плиты 13 и ползуна 10 и стол 3 останавливается. Верхний лист переносится, например, вакуумным захватом (не показан). Затем упор 22 опускается, подмоторная плита 13 поворачивается и вновь включается храповая передача. Цикл продолжается. Дпя быстрого отвода стола 3 вниз упор 22 приподнимается, ползун 10, подмоторная плита 13 поворачиваются и включается фрикционная пара с колесами 15 и 16. Винты 4 и 5 начинают вращаться в обратном направлении. Изобретение обеспечивает автоматизацию опускания стола, что повышает производительность труда.
J4
fB
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU899210A1 |
| Устройство для отделения от стопы заготовки и подачи ее в рабочую зону пресса | 1972 |
|
SU478654A1 |
| Устройство для трафаретной печати | 1971 |
|
SU452522A1 |
| Агрегат для обработки клепки остова бочек | 1958 |
|
SU117231A1 |
| Устройство для разбора стопы листовогоМАТЕРиАлА | 1975 |
|
SU848455A1 |
| Установка Кривовязюка для вырубки заготовок из плоского материала | 1981 |
|
SU958083A1 |
| Устройство для изготовления изделий из полосового материала | 1988 |
|
SU1551454A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
УСТРОЙСТВО ДЛЯ ПОДЪЕМА СТОПЫ ЗАГОТОВОК, преимущественно стопы листов, содержащее стол для заготовок, пpивoди ый в вертикальное возвратно-поступательное движе- ние связанным с ползуном кривошипношатуннЕдм механизмом, приводимым электродвигателем, установленным на опорной плите, смонтированной с возможностью углового горизонт алъного перемещения посредством винтовой пары, гайка которой жестко связана с храповым механизмом, и связанный кривошипно-шатунным механизмом рычаг с упором для взаимодействия с верхней заготовкой стопы, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено второй винтовой парой, цепной передачей для связи винтовых пар и фрикционной передачей, ведущий элемент которой установлен на валу электродвигатели, а велоълиЛ жестко связан с гайкой второй винтовой пары,- при этом собачка храпового механизма закреплена на ползуне, а с S направляющая ползуна жестко соединена с опорной плитой и рычагом. (Л ел о: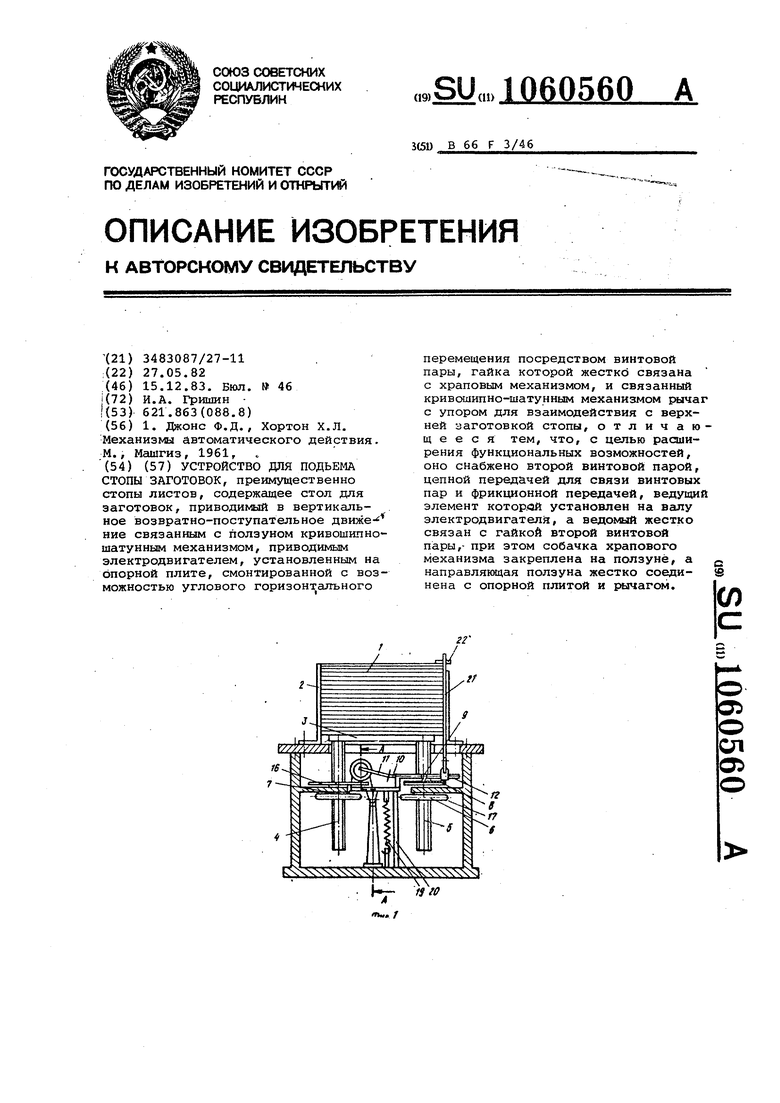
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Джонс Ф.Д., Хортов Х.Л | |||
| Механизмы автоматического действия | |||
| М., Машгиз, 1961, | |||
