;О 3
эо
«
Изобретение предназначено для использования в системах электропривода постоянного тока, характеризующихся высокими требованиями к стабильности динамических свойств системы при существенно нестационарных параметрах объекта управления и исполнительнЪгЬ устройства.
; ЦелЬ-изобретения - повьшение по1 ехозащищенности .при сохранении инвариант рс, свойств электропривода в условиях аддитивных и napaMetpH4eCKHX возмущений.
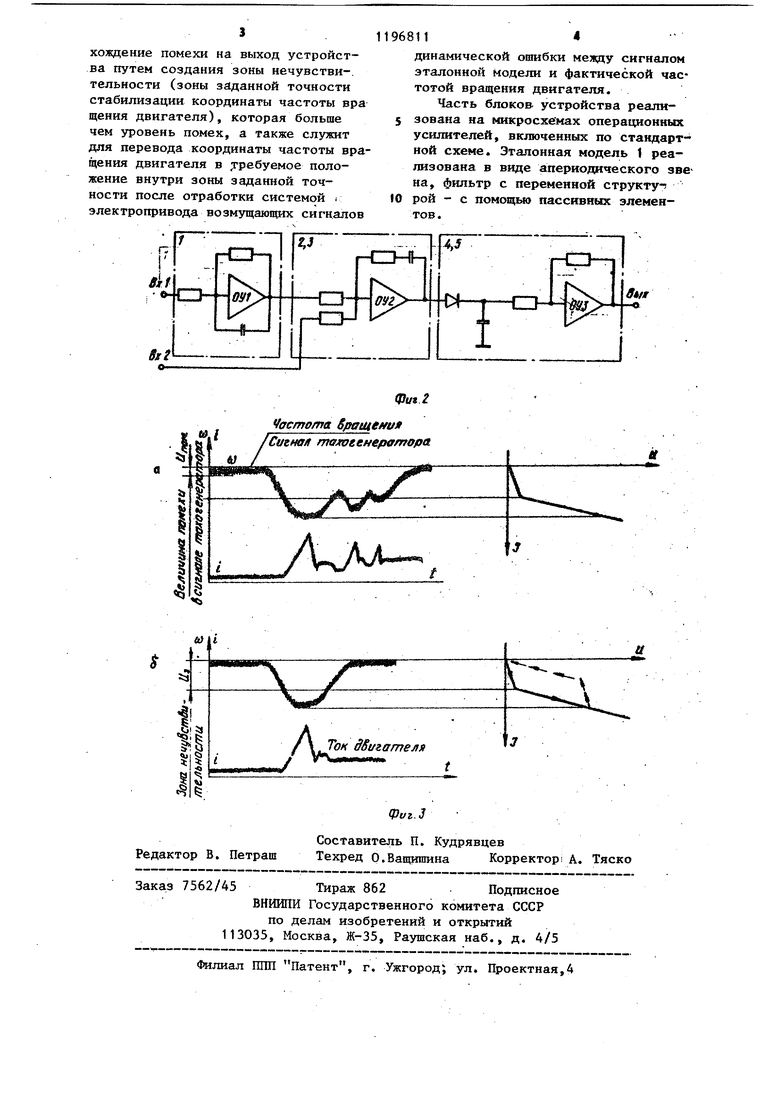
На фиг.1 изображена функциональная схема устройства для управления электроприводом на фиг.2 принципиальная схема устройства для управления электроприводом; на фиг.3 - диаграммы динамических процессов в электроприводе при отработке, возмущения.
. Устройство содержит эталонную модель 1, сумматор 2, звено 3 с пропорционально-интегральной ха.рактеристикой, масштабный усилитель 4 и фильтр 5 с переменной структурой.
Устройство для управления электроприводом работает следующим образом.
Задающий сигнал подается на первый вход устройства. Одновременно на второй вход устройства подается сигнал с выхода датчика частоты вращения двигателя. При совпадении динамических свойств системы электропривода и эталонной модели сигналы поступающие на первый и второй входы сумматора, равны и противоположны по знаку. Поэтому на выходе сумматора 2 среднее значение сигнала равно нулю. Кроме этого, так как с датчика частоты вращения поступает на второй вход сумматора 2 вместе с полезным сигналом еще и помеха, она присутствует на выходе сумматора 2 и на выходе звена 3 с пропорционально-интегральной характеристикой. Однако эта помеха не проходит через фильтр 5 с переменной структурой.
Наличие диода с его вольт-амперной характеристикой в фильтре переменной структуры устанавливает такую зону нечувствительности 1 величина которой больше, чем величина помехи и
(фиг. Зо(). Поэтому
паи помеха н.е проходит через фильтр с.
1968112
переменной структурой. Зона нечувствительности практически определяет зону заданной точности стабилизации системой электропривода частоты
3 вращения двигателя.
Функционирование полной схемы фильтра с переменной структурой показано на фиг,38,
Предположим, что вследствие ка0 ких-либо причин (например, аддитивных или параметрических возмущений) динамические свойства системь электропривода и эталонной модели 1 перестали совпадать. При этом на
15 вькоде сумматора 2, а затем и звена 3 с пропорционально-интегральной характеристикой появляется динами-. чески обработанный разностный сигнал ошибки, величина которого боль-
20 ше, чем зона нечувствительности, и поэтому этот сигнал ошибки проходит через фильтр 5, усиливается масштабным усилителем 4, поступает на вы-, ход устройства, на вход регулятора
25 скорости (в систему управления электропривода).
Система начинает обрабатывать данный, сигнал. В результате наступает момент времени;, когда сигнал ошибки начинает уменьшаться. Этот момент характеризуется тем, что в фильтре переменной структуры изменяется постоянная времени с малой величины (постоянная времени заряда- емкости) на. значительно большую величину (постоянная времени разряда емкости), так как заряд емкости происходит с выхода усилителя через диод, представляющий собой сопротивление малой величины, а разряды через диод осуществиться не могут, а идут по входной цепи сумматора с большим входным сопротивлением. В результате сигнал
45 с выхода фильтра существенно отстает от действительного сигнала ошибки. Это приводит к тому, что в системе ошибка отрабатывается не до величины, равной границе зоны, а
50 до любой заданной вeJШчины внутри зоны. Изменяя постоянную времени фильтра cf/ можно получить различное перерегулирование кривой частоты вращения двигателя при отраJ5 ботке возмущения, т.е,-чем больше Тт тем больше перерегулирование. Таким образом., фильтр с .переменной структурой исключает про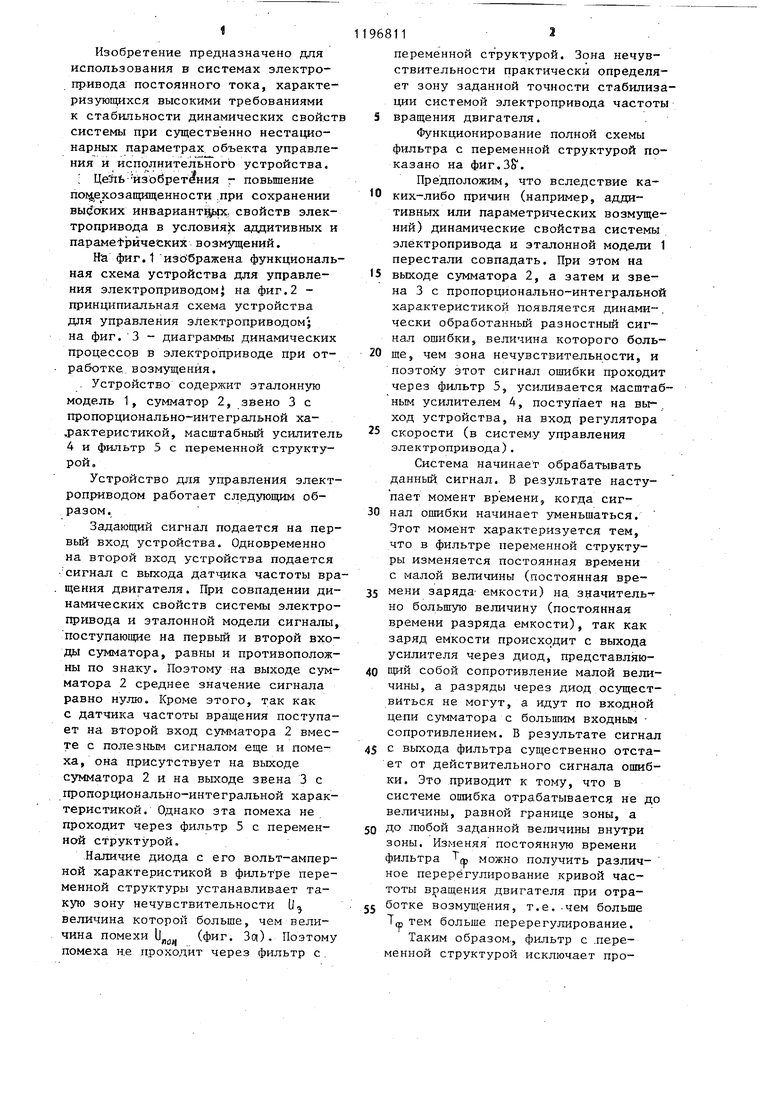
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Устройство для управления электроприводом | 1984 |
|
SU1187149A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Адаптивное регулирующее устройство | 1985 |
|
SU1273878A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ, содержащее последовательно соединенные эталонную модель, сумматор, звено с пропорционально-интегральной характеристикой, причем вход эталонной модели является первым входом устройства, второй вход сумматора - вторым входом устройства, а также масштабный усилитель, выход которого является выходом устройства, отличающееся тем, что, с целью повьшения помехозащищенности при сохранении высоких инвариантных свойств электропривода в условиях аддитивных и параметрических возмущений, в него введен фильтр с переменной структурой, (f) вход которого соединен с выходом звена с пропорционально-интегральной характеристикой, а выход соединен с масштабным усилителем.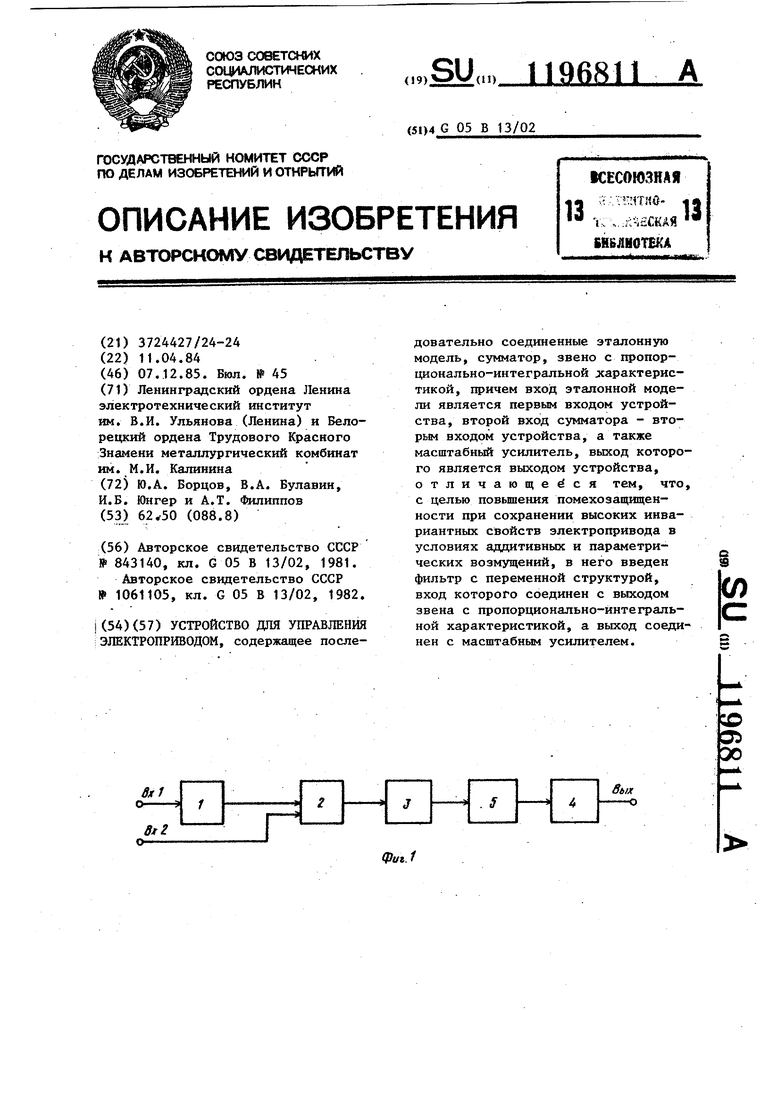
| Устройство для управления электро-пРиВОдОМ | 1979 |
|
SU843140A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| i | |||
