:о эо
3t
Изобретение относится к машиностроению, в частности к манипуляторам с ручным управлением.
Известен манипулятор, содержащий руку с захватом, систему компенсации веса, привод с системой управления 1
Недостатком данного устройства является сложность конструкции.
Известен также манипулятор, содержащий неподвижную колонну, консольноповоротную стрелу, захват, привод захвата, шарнирно связанный со стрелой, выполненный в виде пневмоцилиндра с поршнем и штоком и имеквдий.управляквдий клапан, кинематически связанный с захватом 2. .
Недостатками известного устройств являются относительно малые скорости перемещения исполнительного органа, нестабильность работы системы управления приводом 3axBata.
Цель изобретения - расширение функциональных возможностей и повышение надежности манипулятора.
Указанная цель достигается тем, что в манипуляторе, содержгидем неподвижную колонну, консольно-пово отную стрелу, привод захвата, шарнирно связанный со стрелой, выполненный в виде пневмоцилиндра с поршнем и штоком и имеющий управляющий клапан, кинематически связанныйс захватом, пневмоцилиндр выполнен двухстороннего действия и снабжен .реверсирующим, распределителем, полость управления которого сообщена с управляющим клапаном, а кинематическая связь управляющего клапана с захватом выполнена в виде кулачка, жестко связанного со штоком, и гильч зы, связанной с захватом, установленных с возможностью ограниченного осевого относительного перемещения.
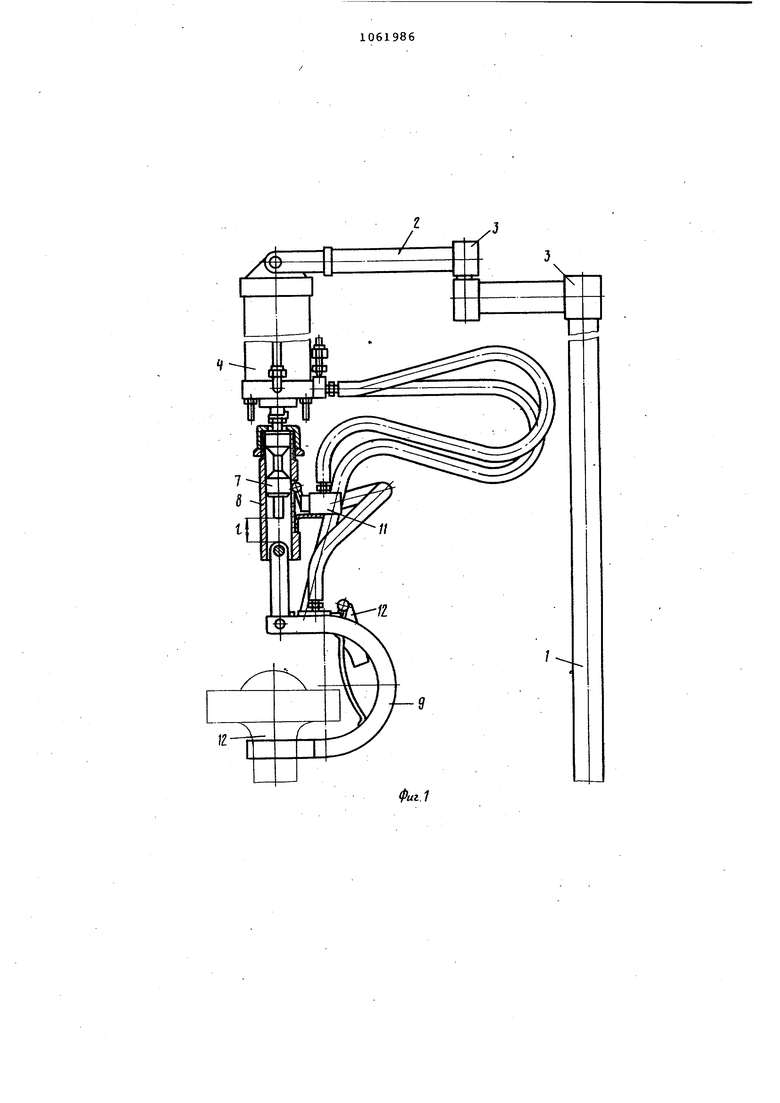
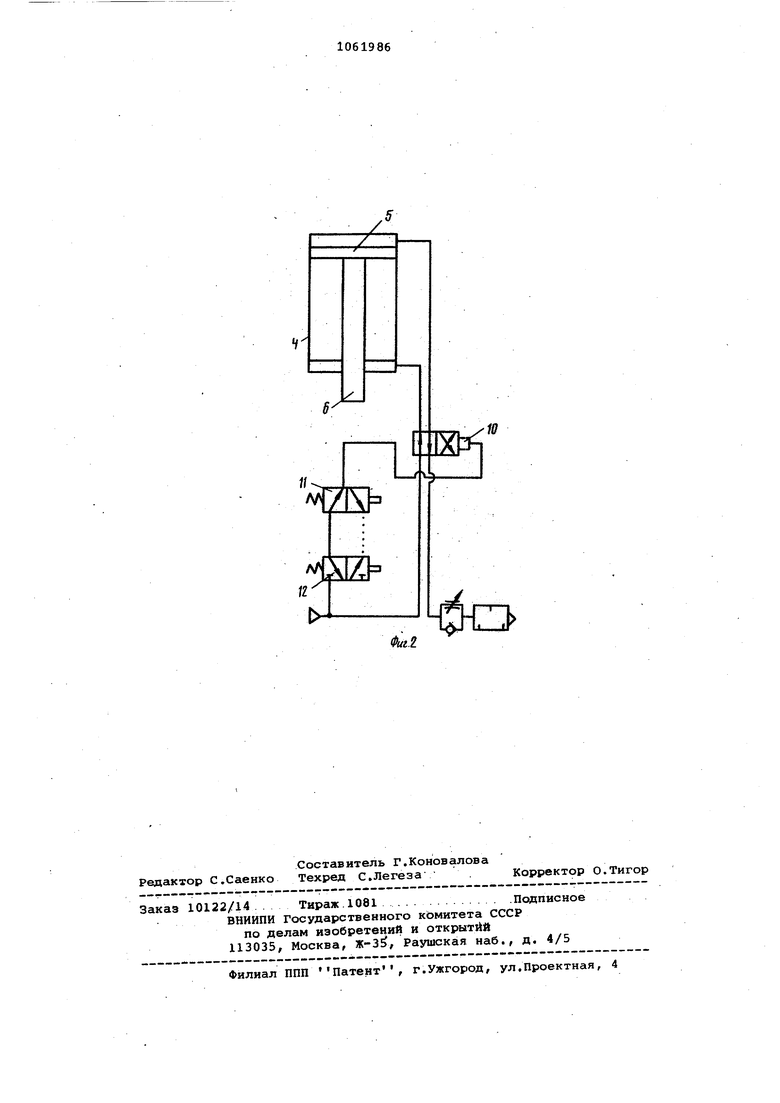
На фиг. 1 изображен предлагаемый манипулятор, общий вид; на фиг. 2 схема управления подачей рабочей среды в полости пневмоцияиндра.
Манипулятор содержит неподвижную колонну 1, консольно-поворотную стрелу 2f установленную при помощи
подшипниковых узлов 3 на колонне 1. На стреле 2 шарнирно установлен пнавмоцилиндр 4 двухстороннего действия с поршнем 5 иШТОКОМ 6, на котором установлен кулачок 7. Кулачок 7 помещен с возможностью ограниченного перемещения в гильзе 8, шарнирно связанной с захватом 9. Подача рабочей среды в полости пневмоцилиндра 4 осуществляется при помощи гидроуправляемого реверсирующего распределителя 10, управление которым производится управляющим клапаном 11, взаимодействующим с кулачком 7. На захвате 8 установлен клапан 12 с ручным управлением.
Устройство работает следующим образом,
В исходном положении поршень 5 пневмоцилиндра 4 находится в крайнем верхнем положении, клапан 12 выключен, а управляющий клапан 11 включен. При включении клапана 12 рабочая среда поступает к управляющему клапану 11, осуществляя управление реверсирующим распределителем 10, меняя направление подачи в полости пневмоцилиндра 4. Поршень 5 со штоком 6, кулачком 7, гильзой 8 и захватом 9 перемещается, вниз до остановки захвата 9 в нужном положении. Кулачок 7 продолжает переметцение вни выключая управляющий клапан 11, что возвращает распределитель 10 в исходное положение. При этом шток б перемещается вверх до тех пор, пока кулачок 7, взаимодействуя с клапаном 11, не возвращает распределитель 10 в рабочее положение. Далее цикл повторяется „
Такое ограниченное перемещение штока 6 с поршнем 5 позволяет осуществлять горизонтальные манипуляции с грузом, исключив при этом воздействие привода захвата на остановившийся в нужном положении захват.
Изобретение позволяет увеличить скорость выполнения операций и повысить производительность труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1283087A1 |
| Устройство управления машиной манипуляторного типа | 1978 |
|
SU701792A1 |
| Манипулятор | 1987 |
|
SU1510257A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1189789A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| Система управления манипулятором | 1981 |
|
SU990503A2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Сбалансированный манипулятор | 1990 |
|
SU1826956A3 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Ограничитель вылета шарнирно-сочлененной стрелы грузоподъемного средства | 1980 |
|
SU935460A1 |
МАНИПУЛЯТОР, содержащий неподвижную колонну, консольно-поворот-г ную стрелу, захват, привод захвата, шарнирно связанный со стрелой, выполненный в виде пневмоцилиндра с . поршнем и штоком и именщий управляющий клапан, кинематически связанный с захватом, отличающийся тем, что, с целью расширения Функциональных возможностей, пнёвмоцилиндр выполнен двухстороннего действия и снабжен реверсирующим распределителем, полость управления которого сообщена с управляющим клапаном, а кинематическая связь управляющего клапана с Зс1хватом выполнена в виде кулачка, жестко связанного со штоком, и гильзы, связанной с захватом, установленных с возможностью ограничен- ного осевого относительного перемещения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Проспект научно-производственного объединения Комплекс, Волгоград, 1977 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Манипулятор | 1979 |
|
SU781052A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
