Изобретение относится к машиностроению, в частности, к манипуляторам с ручным управлением.
Целью изобретения является упрощение конструкции, улучшение условий труда и повышение надежности.
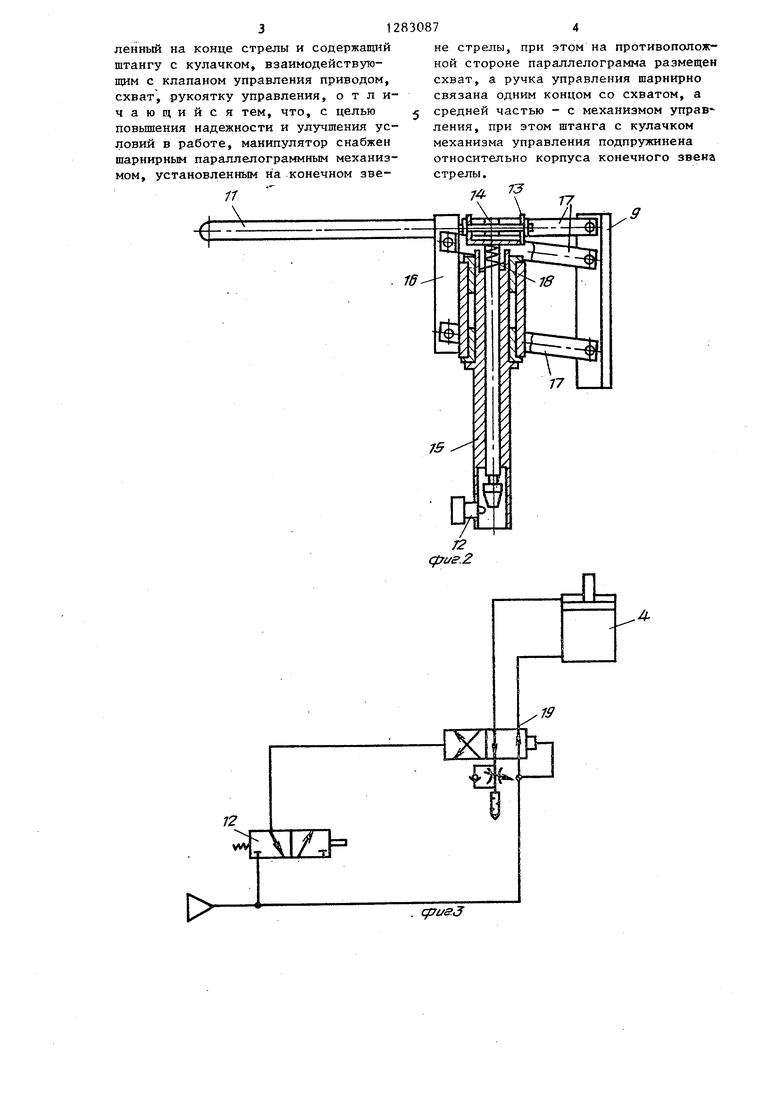
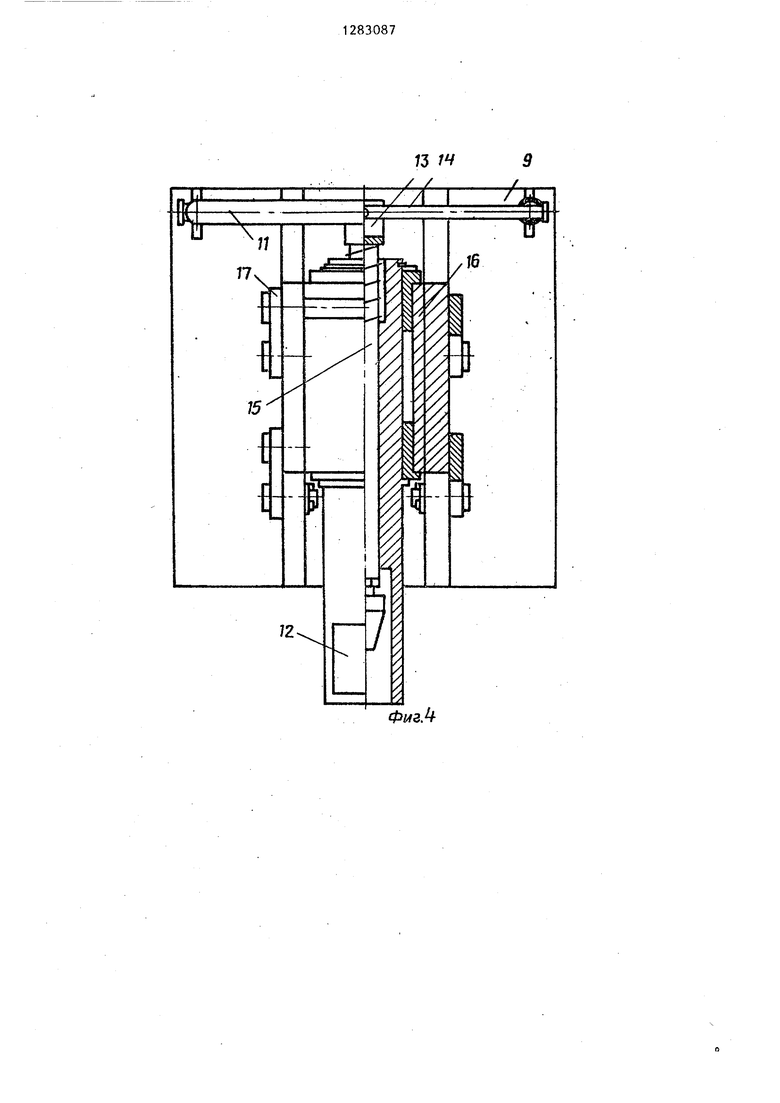
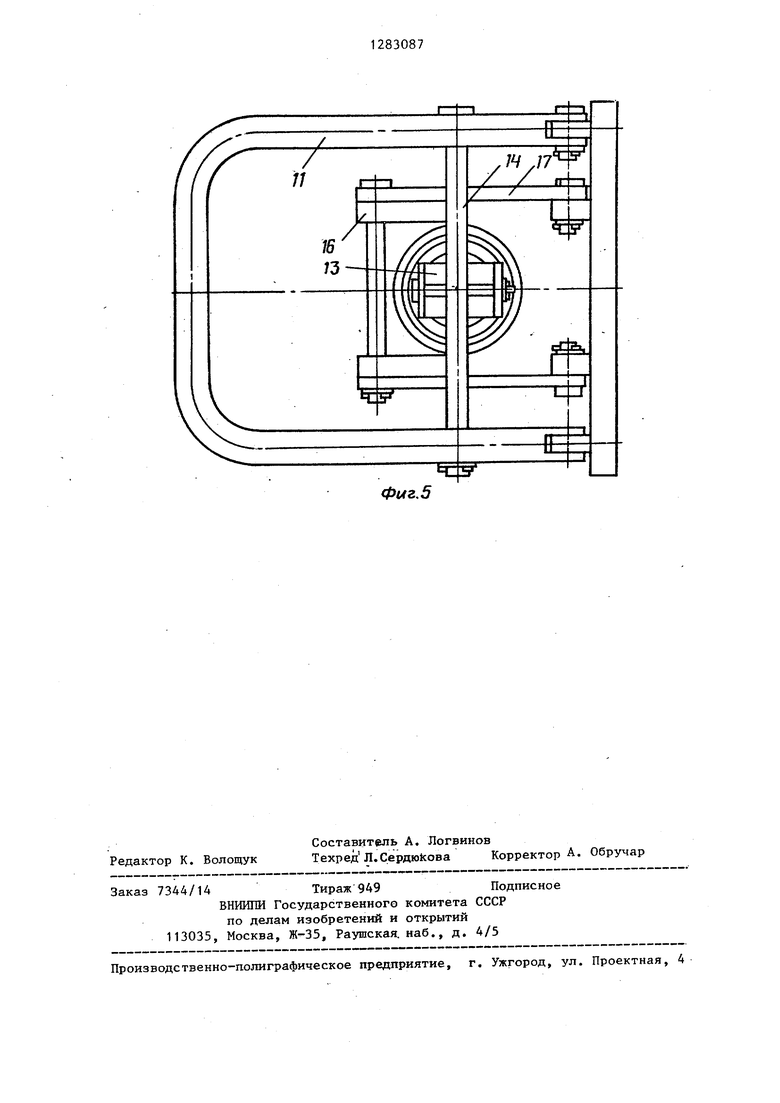
На фиг. 1 изображен манипулятор, общий врщ; на фиг. 2 - механизм управления, общий ВИД} на фиг. 3 - схема пневматическая принципиальная; на фиг. 4 - механизм управления вид слева; на фиг. 5 - то же, вид сверху.
Манипулятор состоит из основания 1, на котором установлены пневмо- гакаф 2, неподвижная колонна 3 и пнев моцилиндр 4, -шток которого соединен с тележкой 5, перемещающейся по колонне 1, на проушине которой через подшипниковые узлы 6 установлена консольно-поворотная стрела 7 с закрепленным на конце шарнирным параллелограммом 8, на подвижном звене 9 которого установлены захват 10 и щарнирно рукоятка 11 управления с возможнрстыо взаимодействия с толка- -телем управляющего клапана 12 посредством кронштейна 13, поперечной оси 14, штанги с кулачком 15, находящей- ся в центральной расточке корпуса 16, а также с рычагаш 17 шарнирного параллелограмма. Для возвращения рукоятки 11 управления в исходное положение на штанге 15 в корпусе 16 . установлена пружша 18. Связь пневмо цилиндра 4 с управляющим клапаном 12 осуществляется через пневмораспреде- литель 19. Перемещаемьй груз обозначен позицией 20.
Манипулятор работает следующим образом.
В исходном положении поршень пнев моцилиндра 4 находится в верхнем положении, управляющий клапан 12 выключен. Нажимная рукоятка 11 управления опущена.вниз, оператор через поперечную ось 14, кронштейн 13, штангу с кулачком 15 включает управляющий клапан 12, и сжатьй воздух через управляющую полость пневморас- пределителя 19 подается в верхнюю полость пневмоцилиндра 4, в результате чего шток пневмоцилиндра 4, соединенный с тележкой 5 и закрепленной на ней консольно-поворотной стре лой 7, опускае гся до тех пор, пока оператор не остановит его в нужном положении. Для остановки манипулятора оператору необходимо придержать рукоятку 11 управления. Шток пневмоцилиндра 4 опускается, а удержанная рукоятка 11 через ось 14, кронштейн
13 и штангу с кулачком 15 отключает управляющий клапан 12, сжатый воздух через пневмораспределитель 19 поступает в нижнюю полость пневмоцилиндра 4 , в результате шток пневмоцилиндра начинает . . подниматься, так как рукоятка управления остается неподвижной, то происходит включение уп- равляющего клапана 12 и шток пневмоцилиндра 4 вновь опускается, т.е.
происходит пульсация -вверх-вниз до тех пор, пока оператор , манипулируя захватом 10,не возьмет груз 20.Затем оператор опускает рукоятку 11 управления, которая усилием пружины 18
возвращается в исходое положение, пе
реключая управляющий клапан 12. Сжатый воздух через управляюшую полость пневмораспределителя 19 подается в нижнюю полость пневмоцилиндра 4, шток которого поднимается и поднимает консольно-поворотную стрелу / с захваченным грузом 20. Для опускания груза оператору необходимо нажать вниз рукоятку 11 управления.
При опускании захвата 10 на какой- либо жесткий упор консольно-поворотная стрела 7 продолжает опускаться за счет свободного хода рычагов 17 шарнирного параллелограмма, рычаги
через поперечную ось 14, кронштейн 13 и штангу 15 перекл1€чаю.т управля- юшJiй клапан 12, сжатый воздух через пневмораспределитель 19 подается в нижнюю полость пневмоцилиндра 4,
поднимая -его шток и связанную с ним консольно- поворотную стрелу 7 в пределах свободного хода рычагов параллелограмма, а так как рукоятка 11 управления удерживается оператором,
то управляющий клапан 12 переключается, стрела опускается. Колебания вверх-вниз гасятся паралелограммом 8, поэтому захват 10 остается неподвижным .
Формула изобретения
Манипулятор, содержащий неподвижную колонну, установленнзлю на ней -стрелу с приводом ее вертикального перемещения, вьшолненным в виде си- лового цилиндра двустороннего дей- ствия, механизм управления приводом вертикального переметдения, ус танов3128
ленный на конце стрелы и содержащий штангу с кулачком, взаимодействующим с клапаном управления приводом, схват, рукоятку управления, отличающийся тем, что, с целью повьшения надежности и улучшения условий в работе, манипулятор снабжен шарнирным параллелограммным механизмом, установленным на конечном зве
не стрелы, при этом на противоположной стороне параллелограмма размещен схват, а ручка управления щарнирно связана одним концом со схватом, а средней частью - с механизмом управления, при этом штанга с кулачком механизма управления подпружинена относительно корпуса конечного звена стрелы.
7Э
77
/I 9
. gyt/sj
ФмгЛ
Редактор К. Волощук
Составитель А. Логвинов
Техред Л.СердюКова Корректор А. Обручар
Заказ 7344/14Тираж 949Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская, наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.5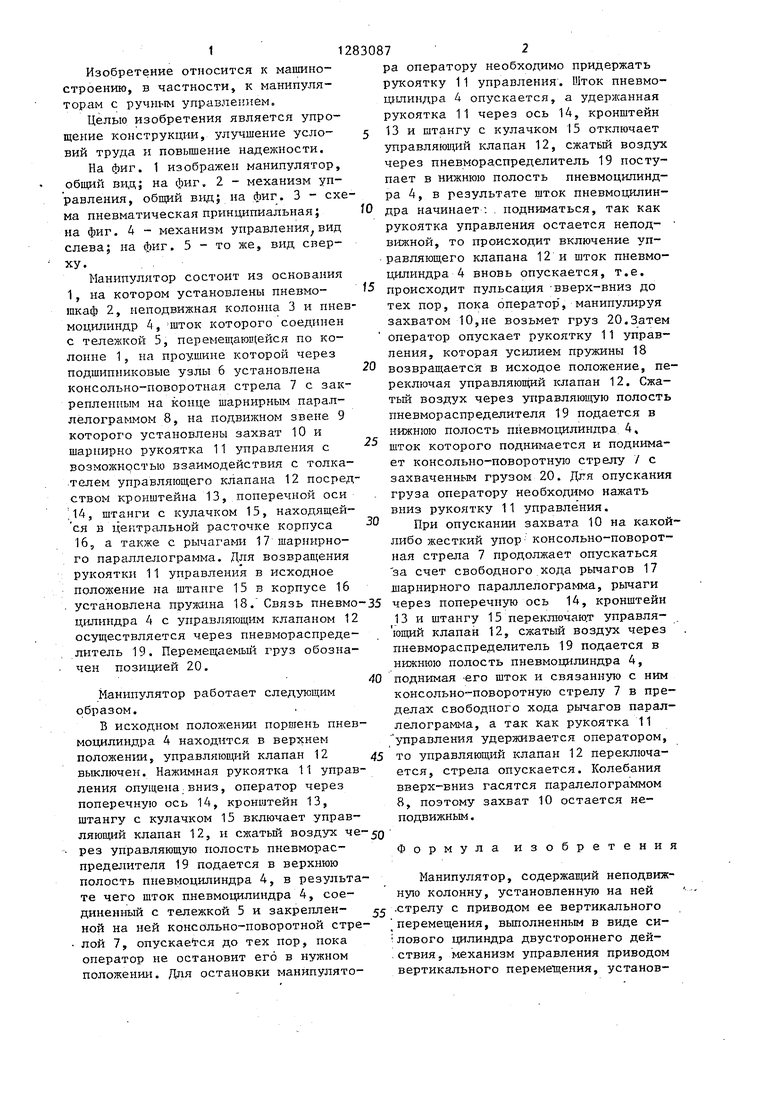
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Манипулятор для дозированной загрузки емкости сыпучим материалом | 1985 |
|
SU1281399A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Манипулятор | 1981 |
|
SU1061986A1 |
| МАНИПУЛЯТОР С ВАКУУМНЫМ ЗАХВАТОМ | 1995 |
|
RU2099176C1 |
| Манипулятор | 1980 |
|
SU872251A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
| Устройство для формирования и разборки пакетов штучных грузов | 1984 |
|
SU1421651A1 |
| Устройство для подачи плоских заготовок в рабочую зону пресса | 1984 |
|
SU1238834A1 |
Изобретение относится к машиностроению, в частности, к манипуляторам с ручйым управлением, и позволяет повысить надежность и улучшить условия в работе за счет того, что манипулятор снабжен шарнирным парал- лелограммным механизмом 8, установленным на конечном звене.стрелы 7, при этом на противоположной стороне параллелограмма 9 размещен схват 10, а ручка управления шарнирно связана одним концом со стороной параллелограмма, на которой расположен схват 10, а средней частью - через поперечную ось 14 с управляющим механизмом подъема и опускания силового цилиндра 4. Это позволяет осуществлять управление манипулятором только рукояткой управления. 5 ил. Q б КЛ с (риг.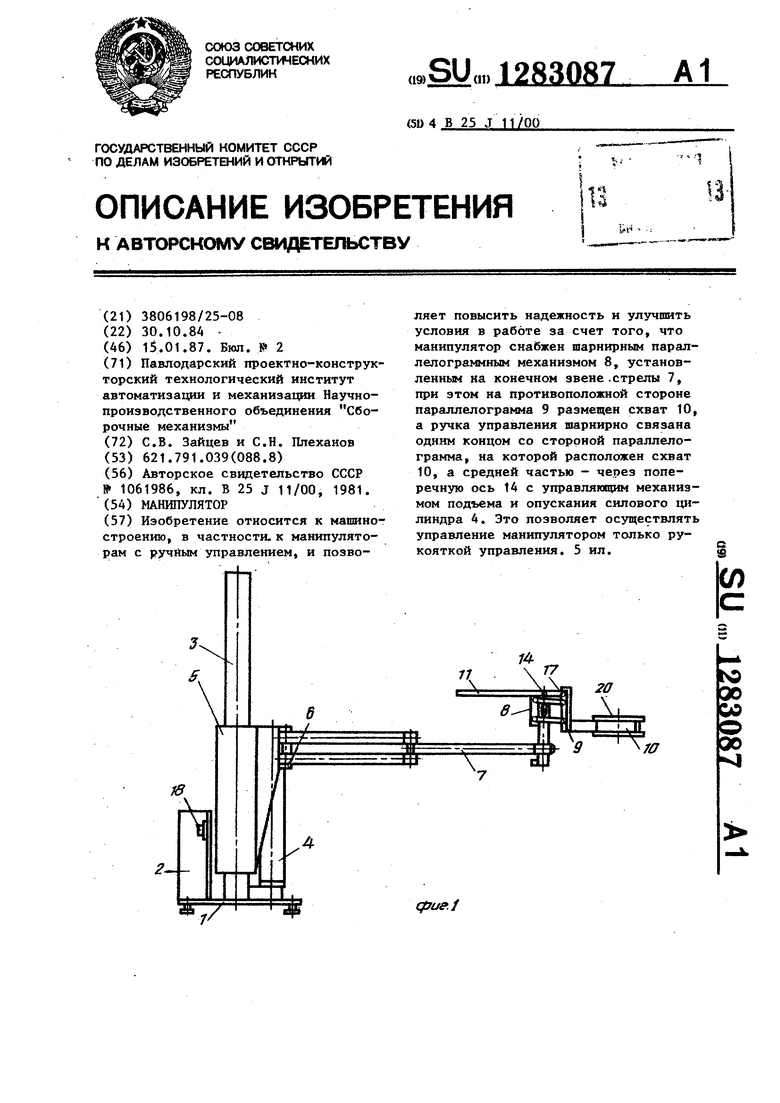
| Манипулятор | 1981 |
|
SU1061986A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
